Technique:
|
Edité le 21/05/2006. |
DéfinitionLe différentiel est un système mécanique qui permet de distribuer une vitesse de rotation de façon adaptative aux besoins d'un ensemble mécanique. Pour la petite histoire, le différentiel mécanique a été inventé en 1827 par le mécanicien français Onésiphore Pecqueur (1792-1852) plus de 50 ans avant les débuts de l'automobile à essence, pour réaliser un chariot à vapeur doté d'un rayon de braquage sans comparaison pour l'époque. Il fut employé dès 1860 sur les premiers véhicules routiers à vapeur. |
 |
|
Le principe du différentiel en automobile repose sur le principe de ce que l'on appelle en mécanique générale la "cellule différentielle", qui est son vrai nom technique. Une cellule différentielle sert à rompre, sous certaines conditions, une chaîne cinématique. Une chaîne cinématique est l'ensemble des organes d'une construction qui transmet le mouvement de l'émetteur (le moteur) au récepteur (qui utilise le mouvement pour fournir le travail, dans le cas d'une auto, une roue). Dans la plupart des cas, une chaîne cinématique est un ensemble rigide mécaniquement où le moteur et le récepteur sont liés mécaniquement, le rapport entre les déplacements angulaires de l'un et de l'autre est fixe, même si un organe permet de modifier ce rapport (comme une boite de vitesse par exemple). Autrement dit, le rapport entre les deux organes, le menant et le mené, est fixe. |
 |
|
Dans le cas d'une chaîne cinématique où le moteur entraîne plusieurs récepteurs (les quatre roues par exemple), tous les récepteurs sont liés mécaniquement entre eux et leur mouvement angulaire est donc défini. Si un récepteur est freiné, toute la chaîne est donc freinée. Si un récepteur se trouve bloqué, toute la chaîne est alors bloquée. Dans certaines applications cet état de fait pose problème et la cellule différentielle peut y apporter une solution. Elle a la propriété d'autoriser une différence de déplacement angulaire entre l'émetteur et le récepteur. C'est donc un calculateur mécanique qui répartit la puissance entre l'émetteur et les récepteurs. La cellule différentielle équilibre les forces entre deux récepteurs. Le récepteur le moins chargé utilisera plus de puissance jusqu'à ce que sa charge soit égale au récepteur le plus chargé et ce en augmentant sa vitesse. Si l'équilibre ne peut être rétabli, le récepteur le moins chargé absorbe toute la puissance disponible. ApplicationLa justification la plus commune pour justifier la présence de différentiels sur les automobiles grandeurs ou en modèle réduit est la nécessité d'autoriser des vitesses au niveau des roues, différentes entre l'intérieur et l'extérieur des virages, pour permettre de compenser les différences de parcours. Si l'une des roues est bloquées, la cellule différentielle transmet tout le couple à l'autre roue. Elle tourne à une vitesse double. L'inconvénient du différentiel est que si l'une des deux roues perd de l'adhérence, le différentiel fournit alors l'ensemble du couple à celle-ci: le véhicule perd de la motricité, voir il ne peut plus avancer. Pour remédier à cet effet en automobile grandeur, on peut bloquer momentanément le différentiel (sur les véhicules tout-terrain notamment) ou utiliser des différentiels à glissement limité comme le différentiel Torsen (TORque SENsitive, sensible au couple en français dans le texte). En automodélisme thermique, et plus particulièrement en tout-terrain, ces solutions sont souvent employées. Par contre, en électrique, mis à part quelques tentatives isolées et sans suite en tout-terrain, ce sont principalement les différentiels dits à billes qui sont employés en compétition. Souvent ces systèmes étaient soit lourds, soit fragiles, soit les deux, ce qui explique peut-être leur rareté en électrique. Cependant, cette justification par ce phénomène de différence de vitesse des roues dans un virage n'est pas la seule. Il convient également de maîtriser les efforts moteurs de chacune des roues pour assurer correctement la motricité du véhicule. Le pneumatique ayant la propriété de produire un effort moteur uniquement si son glissement circonférentiel est non nul (cet effort croissant avec le glissement), il ne faut pas lui imposer une vitesse de rotation uniforme. Par exemple, si un arbre rigide (spool) relie les deux roues d'un même essieu, en ligne droite les glissements respectifs seront différents pour de multiples raisons:
De plus les réponses de chacun des pneumatiques au glissement seront différentes (différence d'adhérence, de température de gomme, influence du traitement à pneu, etc.) Les efforts ne seront jamais vraiment symétriques même en situation de ligne droite. Le contrôle des efforts étant impossible en transmettant une vitesse de rotation donnée à chaque roue, il est préférable de transmettre un couple déterminé. Les vitesses deviennent alors quelconques et dépendent des situations de roulage. Cas particulier du différentiel centralLes différentiels centraux sont principalement employés en thermique tout-terrain. Il y a eu dans les années 80 et 90 des tout-terrains 1/10° électriques utilisant des différentiels centraux, mais les productions récentes orientées compétition n'offrent que très rarement ce type de configuration. L'utilisation principale du différentiel central est donc d'équilibrer le plus possible la traction des roues avant et la propulsion des roues arrière pour la motricité optimale, selon que le terrain et les conditions requièrent plus de propulsion ou de traction, tandis que chaque autre différentiel permet de faire tourner les roues extérieures plus vite que les roues intérieures qui ont moins de distance à parcourir, ce qui stabilise la voiture et donc augmente la vitesse de passage en courbe. Il est également possible de faire varier le couple réparti entre l'avant et l'arrière, mais ceci est une autre histoire. Construction des différentiels en automodélisme électriqueOn distingue deux types principaux de différentiels en automodélisme électrique, les différentiels dits à pignons et les différentiels dits à billes. |
|
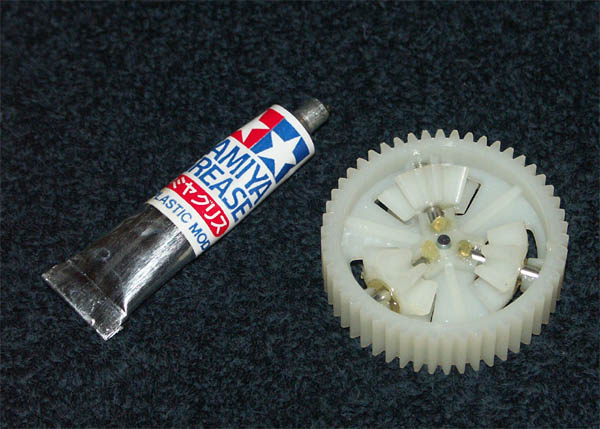
Les différentiels à pignons sont le type le plus ancien. Ils sont actuellement plutôt destinés aux engins de loisirs, car de construction (théoriquement) robuste et nécessitant peu d'entretien. On distingue deux types principaux de différentiel à pignons différenciés par le type de satellite, ceux à pignons coniques (le type le plus répandu) et ceux à pignons droits. Sous sa forme la plus fréquente, il est composé d'une couronne dentée ou d'une poulie qui supporte une cage de pignons satellites, ceux entraînant deux planétaires solidaires des arbres entraînés. La photo ci-contre montre par exemple la couronne dentée et les satellittes d'un différentiel d'un engin de loisir de marque Tamiya. |
 |
|
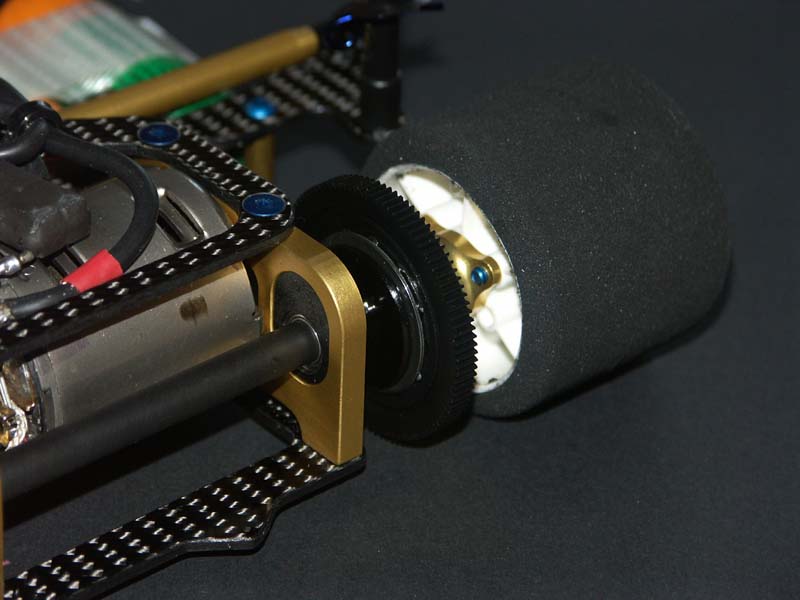
Les deux photos ci-contre (1 et 2) illustre par exemple ce qui se pratiquait en piste 1/12° électrique compétition. Au tout début, on trouvait sur l'axe arrière de simple axe rigide. Ensuite sont apparus des différentiels à pignons de constructions plus ou moins complexes.A l'image de cette Ayk EXL480K de 1982 environ, où les deux satelittes et les planétaire sont très compacts et logés au centre de l'axe, sous ce cylindre en composite époxy et fibres de verre de couleur verdâtre. |
|
|
Inutile de préciser que ce type de construction était non seulement une option coûteuse, mais également assez fragile. |
 |

|
Il est possible d'en régler la dureté sur certains modèles:
|
|
Le différentiel à billes a été inventé par Cecil Schumacher, fondateur de la toujours célèbre marque anglaise Schumacher Racing Products de Northampton en 1980. Au début, elle produisait essentiellement des pièces optionnelles pour modèles réduits, dont le premier différentiel à billes introduit en 1982. Il sera présent sur la cultissime C-Car, une piste 1/12° électrique qui remporta de nombreux succès jusqu'à la fin des années 80. Son grand avantage est d'être réglable en dureté simplement. Le différentiel à billes est particulièrement apprécié dans les catégories électriques, car il est, comparativement à un différentiel à pignons à glissement limité, plus léger, et beaucoup plus compact, et s'il est correctement conçu et réalisé, plus fiable et plus endurant. |
 |
Entretien et ajustement du différentielDans le cas des différentiels à pignons, il n'y a pas d'entretien particulier à faire si ce n'est une inspection régulière en vue d'observer l'usure des satellites et des planétaires, une recharge en graisse si celle-ci a centrifugé ou un nettoyage et un regraissage si celle-ci a dégénéré. Dans le cas des différentiels à billes, trois articles spécifiques dédiés sont disponible sur ce site: |
 |
Réglage du différentielIl est possible d'ajuster le comportement d'un châssis quatre roues motrices en jouant sur la dureté des différentiels. Cependant il est préférable de jouer sur ce point en dernier recours, on préfèrera tout d'abord jouer avec d'autres réglages ou d'autres modes de transmission (roue-libre avant, roue-libre centrale ou spool), car un différentiel durci affecte la vitesse de passage en virage et n'est pas forcément la solution optimale en matière de motricité (qui est le véritable Saint-Graal de la performance). En général, on préconise des différentiels bien libres sur la plupart des pistes, de la faible accroche à un bon grip. En resserant le différentiel à l'avant, l'auto sera un peu plus sous-vireuse en entrée de virage et la motricité sera un peu améliorer en sortie (on se rapproche du comportement d'un spool). En savoir plus:
Textes et photos de Georges. |