IndoorSeries 2021-2022 Round 2,
|
Edité le 12/12/2021. |
Introduction.Après une première manche ayant compté 28 participants, cette seconde manche des IndoorSeries 2021-2022 organisée par le club IRCR (Indoor RC Romand) a vu sa fréquentation presque doubler, avec 35 inscrits en catégorie Touring Car 13.5T Open, 13 en catégorie Pan Car 1/12° 13.5T Blinky et 6 en catégorie Formule 1 21.5T Blinky. En ces temps particuliers, cette course, organisée par une petite équipe de quelques personnes seulement avec les difficultés logistiques et financières que cela représente, fut une expérience à savourer autant que possible, avec des pilotes venus de Romandie bien sûr, de Suisse alémanique ainsi de de France, de tous niveaux, des purs débutants aux champions nationaux, des règlements simplifiés au maximum, une moquette type ETS avec un grip démoniaque et un tracé technique sans être vicieux. Espérons que la situation se détende afin que les prochaines manches puissent avoir lieu, celles-ci étant programmées aux dates suivantes:
|
 |
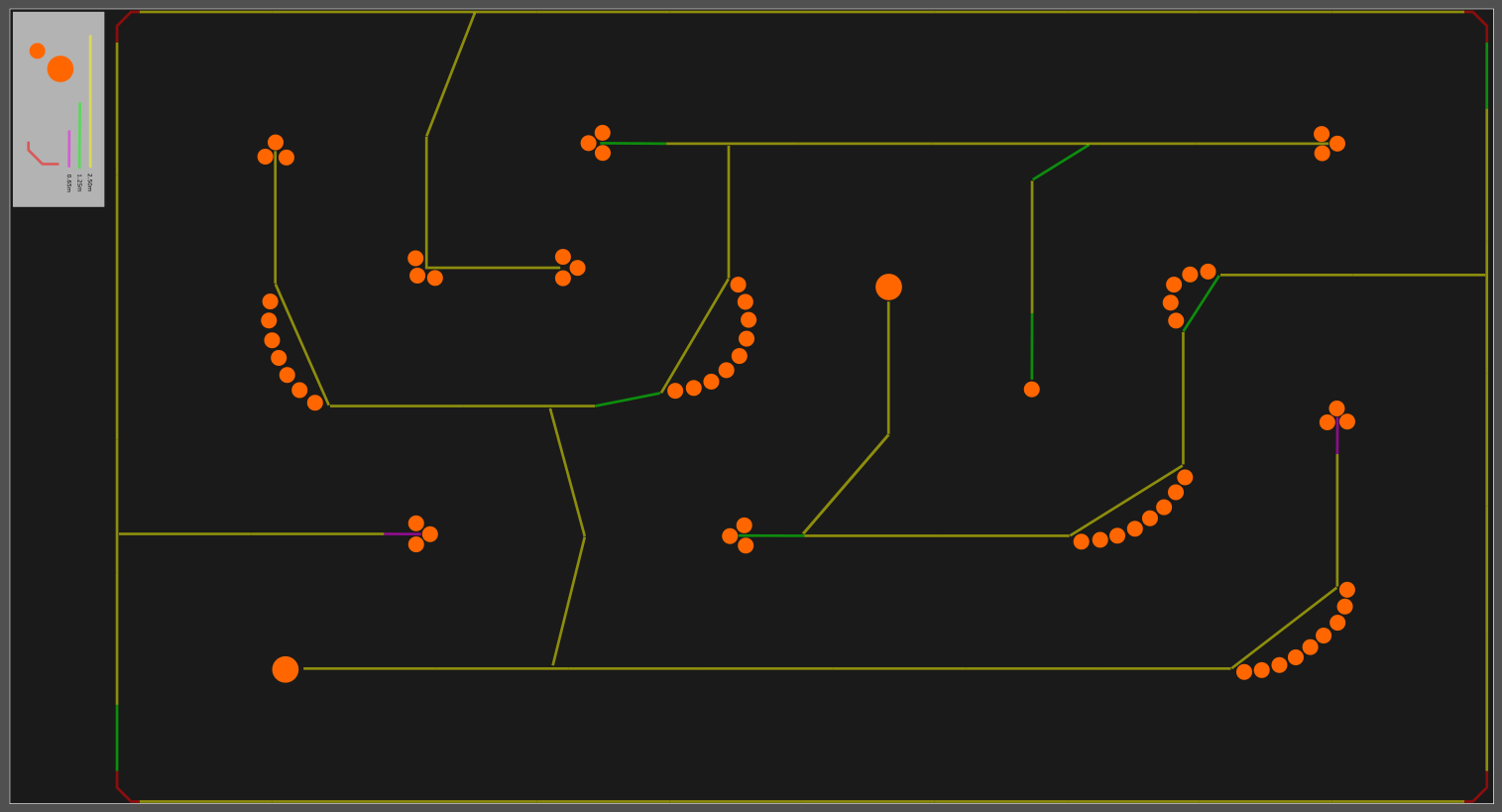
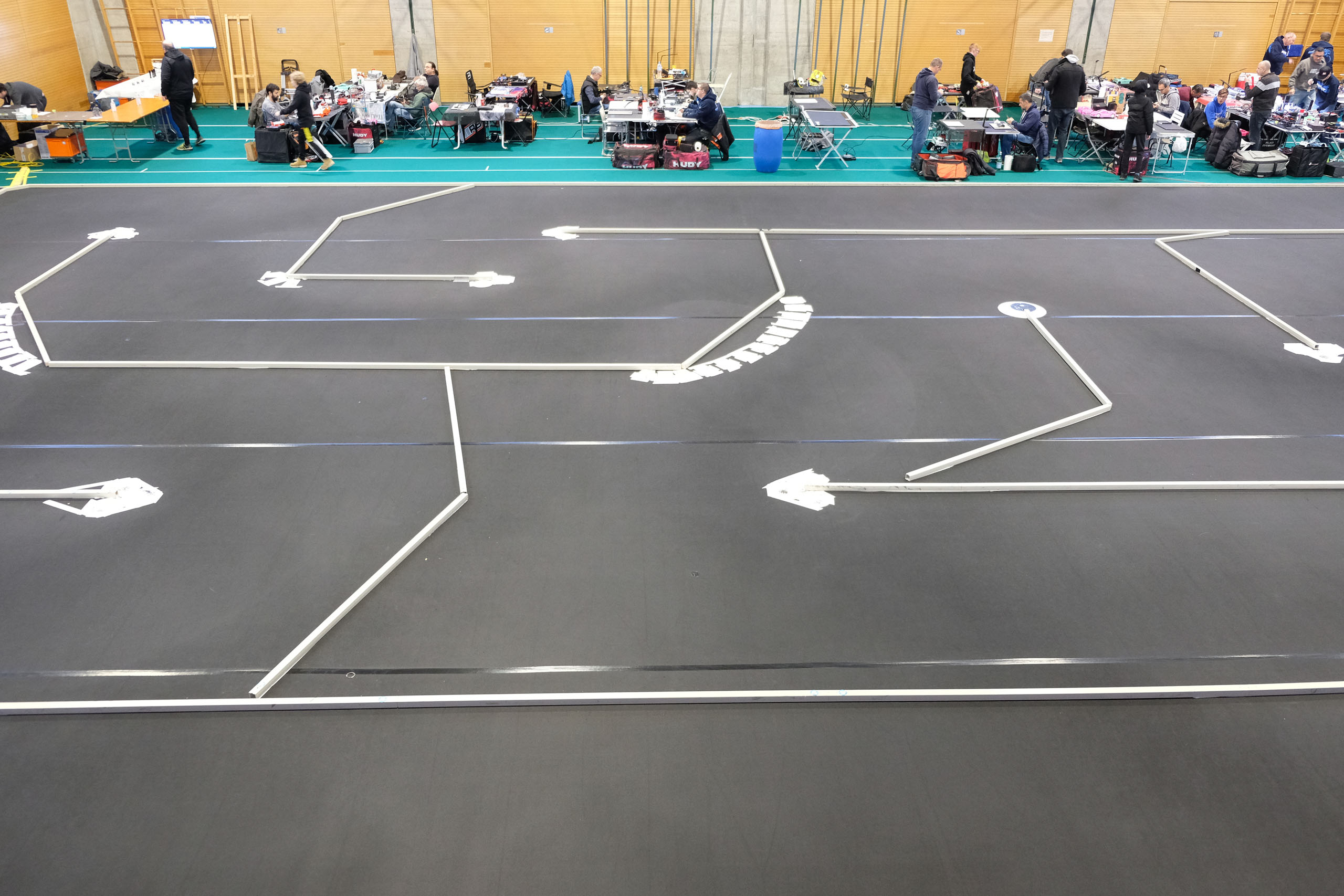
La piste.Le tracé de la piste choisi pour cette manche se voulait sensiblement plus technique que celui de la première manche, avec une largeur légèrement réduite. Le sens de rotation était le sens anti-horaire. La ligne droite, au pied du podium, débouchait sur un virage à 90° rapide, puis rapidement sur un autre à 180°. Immédiatement après, un autre virage à 90° bien arrondi débouchait sur une courte ligne droite. S'en suivait un dédale de virages débouchant à nouveau sur une courte ligne droite. Après un freinage à bien négocier pour ne pas trop perdre de temps en étant trop loin de la trajectoire, on trouvait de nouveau un enchainement de virages principalement à 180° pour se retrouver sur la ligne droite au pied du podium, sans avoir eu le temps de souffler! En résumé, un tracé intense en émotions, fort exigeant mais extrêmement plaisant. Pour l'occasion, une nouvelle boucle de comptage a été conçue et fabriquée par des membres du club, puis testée et validée lors de cette course. En effet, lorsqu'on organise une course sur moquette, il y a deux principaux choix pour implanter la boucle de comptage, qui est, comme son nom l'indique, une boucle dont la première branche doit être installée parallèlement à la seconde, avec une distance d'environ 30cm entre les deux. Soit on construit un portique pour surélever la boucle au-dessus du sol, mais cela a plusieurs inconvénients, comme le fait qu'une voiture puisse le percuter, ou que la boucle soit relativement éloignée du transpondeur installé dans la voiture. Soit on l'implante au sol, sous la moquette, ce qui n'est pas vraiment pratique à installer, soit sur la moquette, scotchée, avec des risques d'arrachement quasiment inévitables. Et de plus, dans ces derniers deux cas, la boucle, qui fait presque 2mm de diamètre de mémoire, crée une double bosse au sol. Sachant qu'une Pan-Car 1/12° électrique roule avec une garde au sol de 3mm minimum, autant dire que le passage sur ladite boucle ne passe pas inaperçu. Cette nouvelle boucle de comptage ultrafine se scotche à même le sol, et son passage est imperceptible. On peut la voir sur certaines photos ci-dessous, au niveau de la caisse en plastique orange. Plus d'informations peut-être au prochain épisode! |
 |
 |
 |
 |
 |
 |
 |
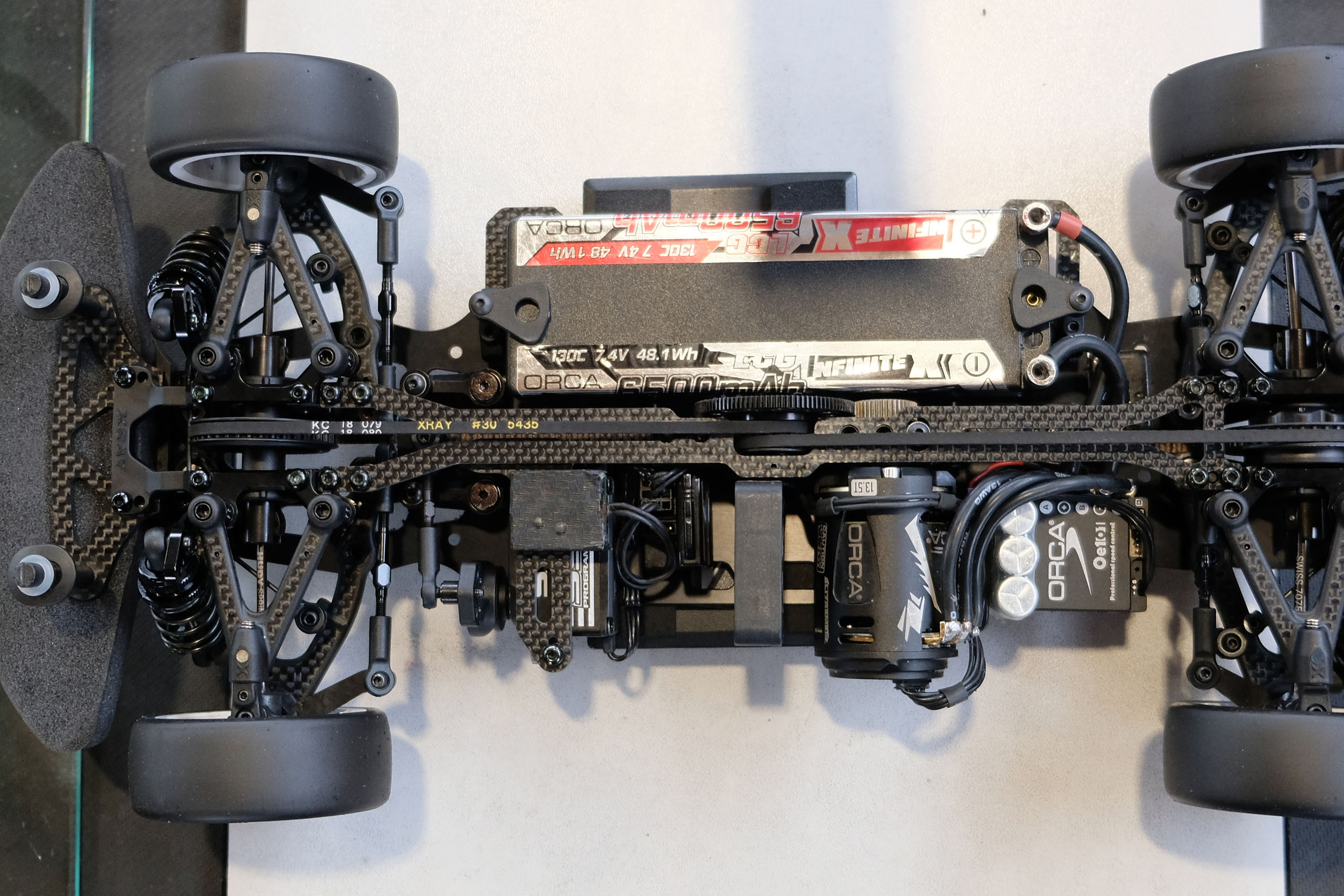
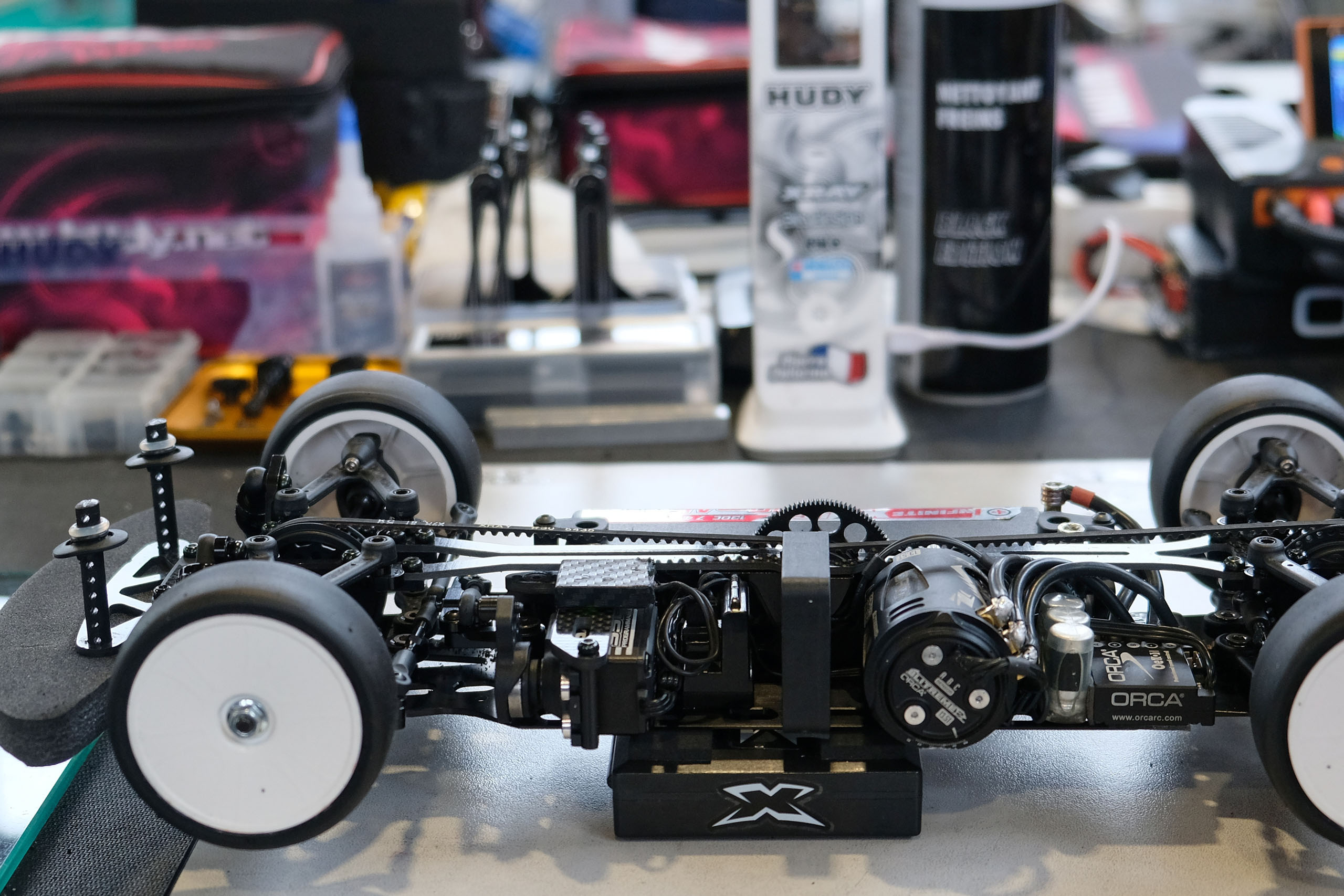
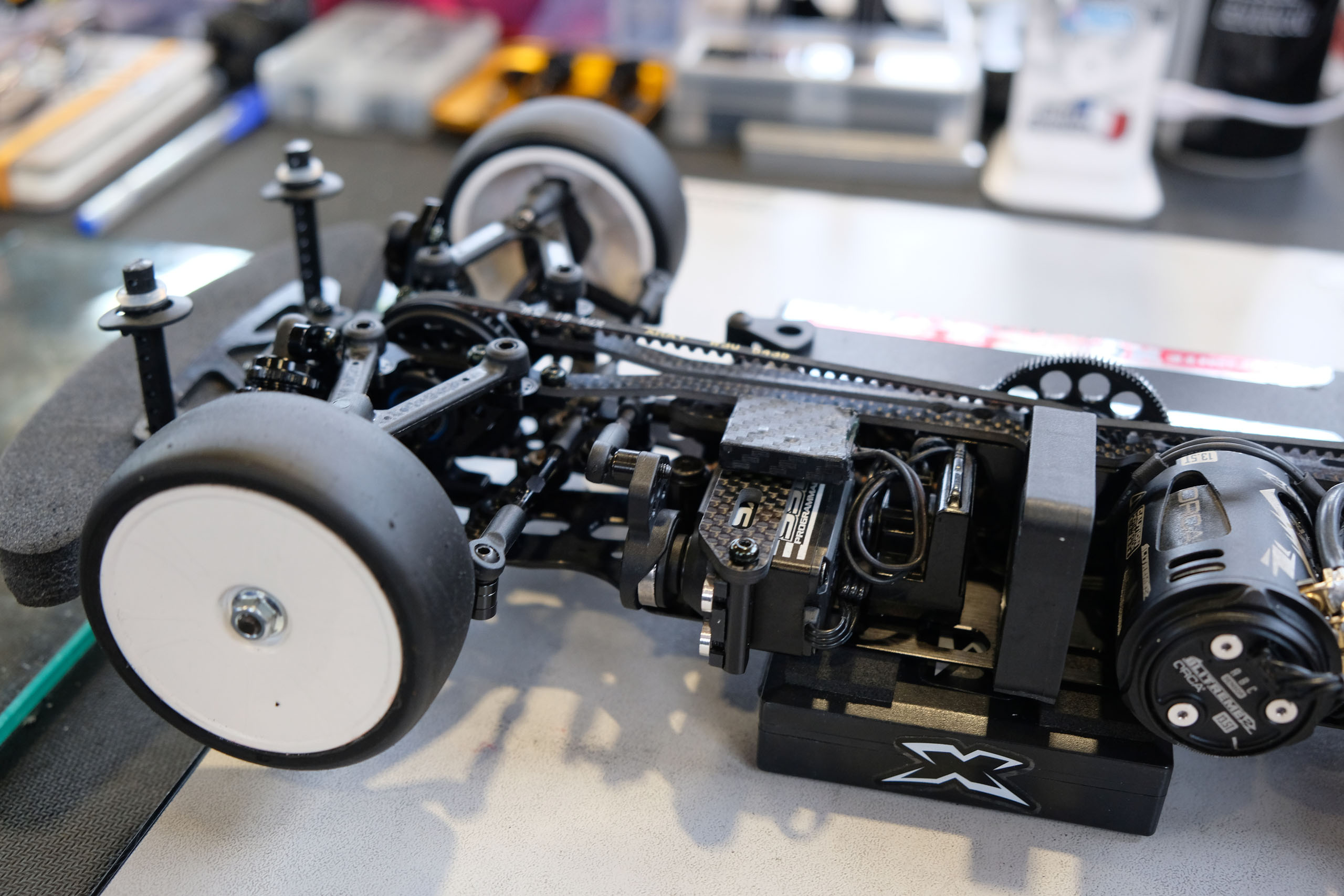
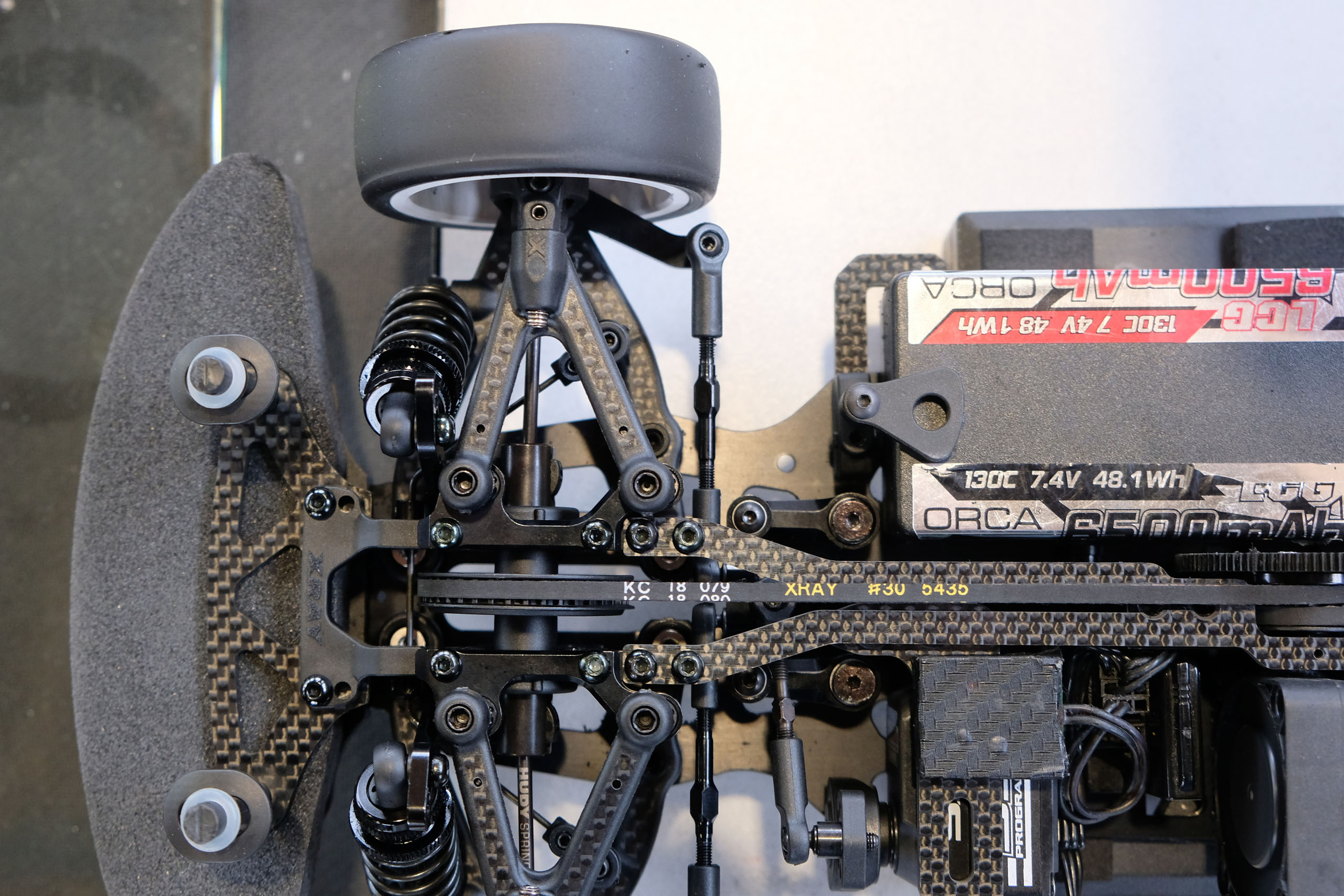
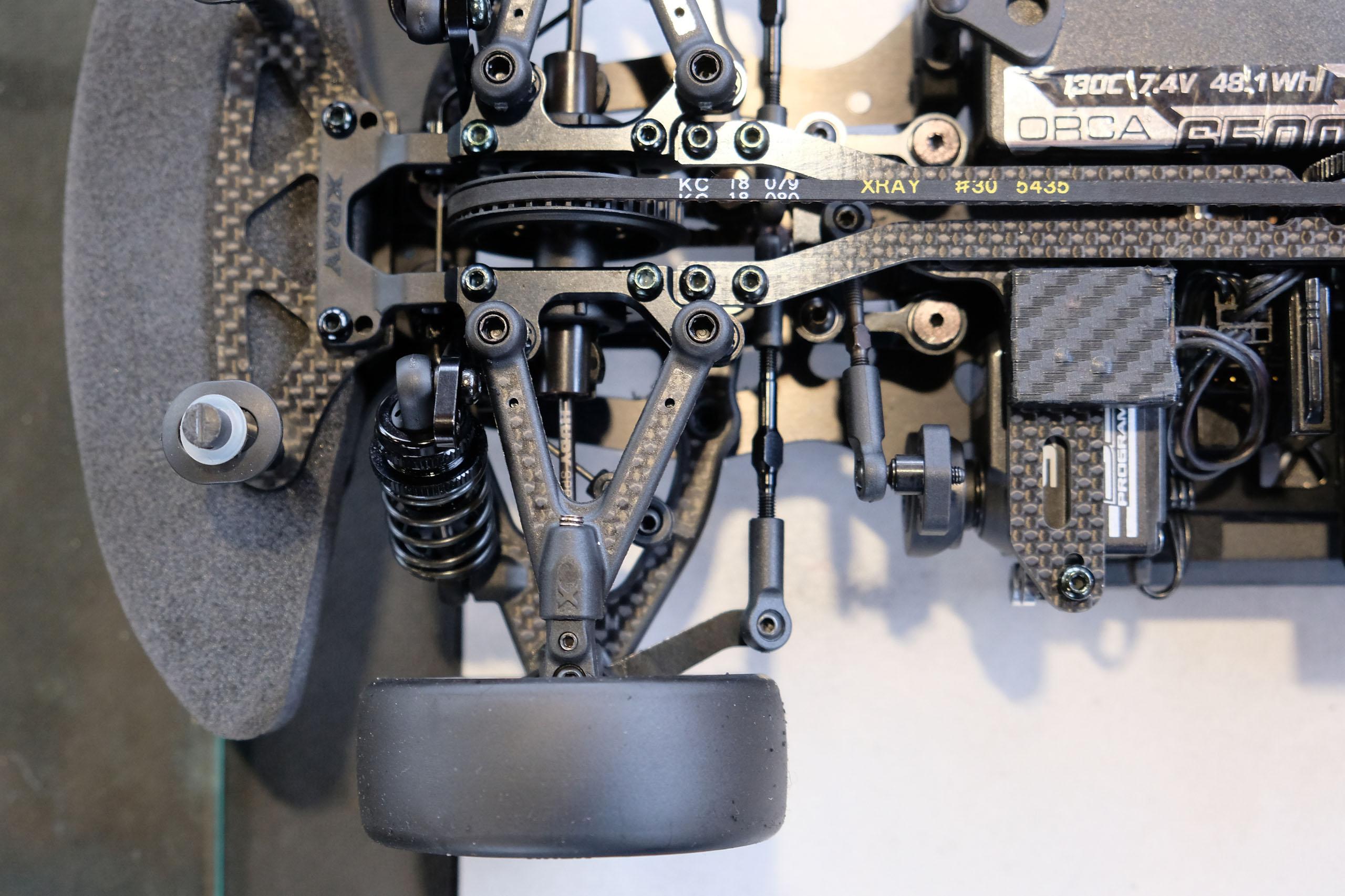
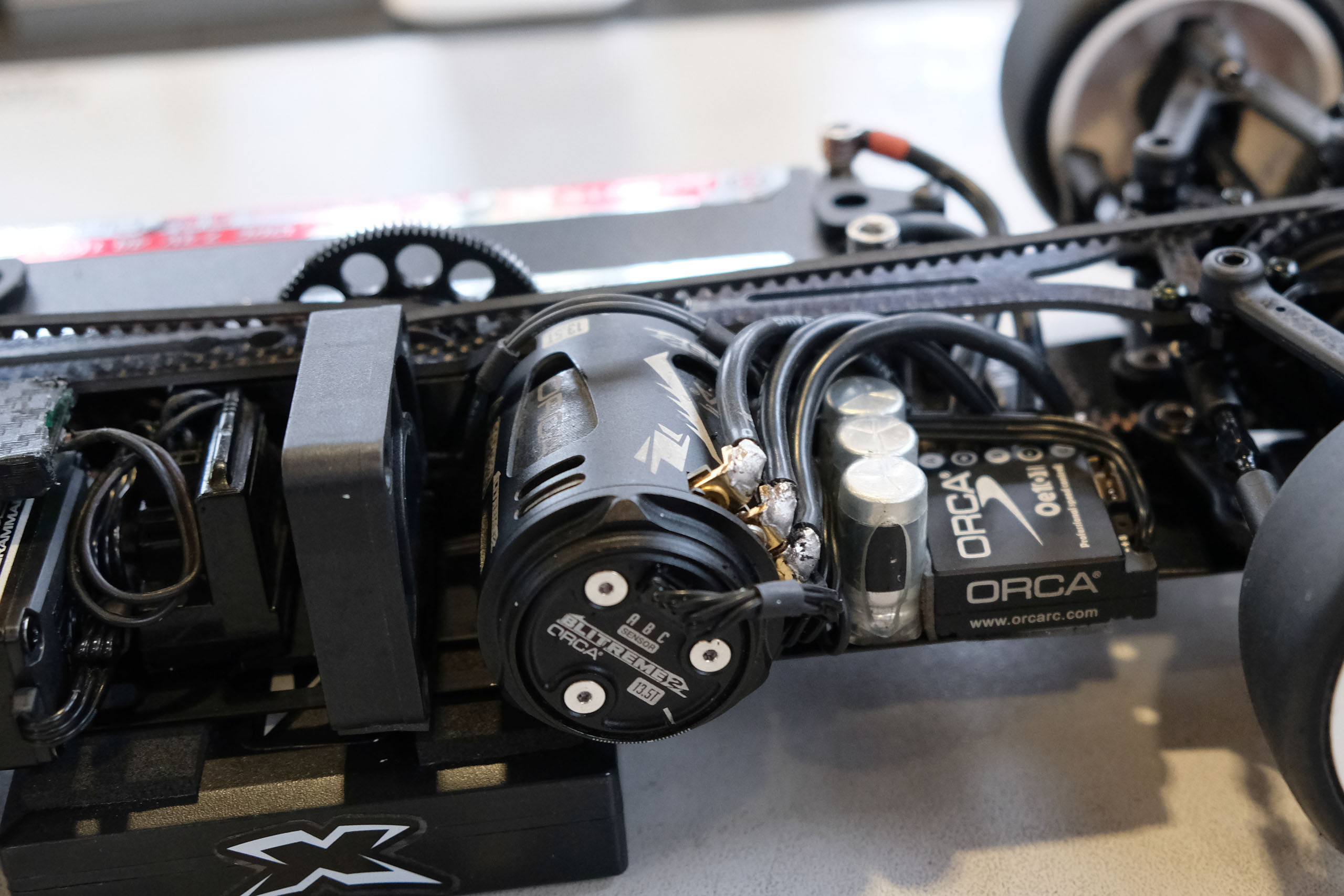
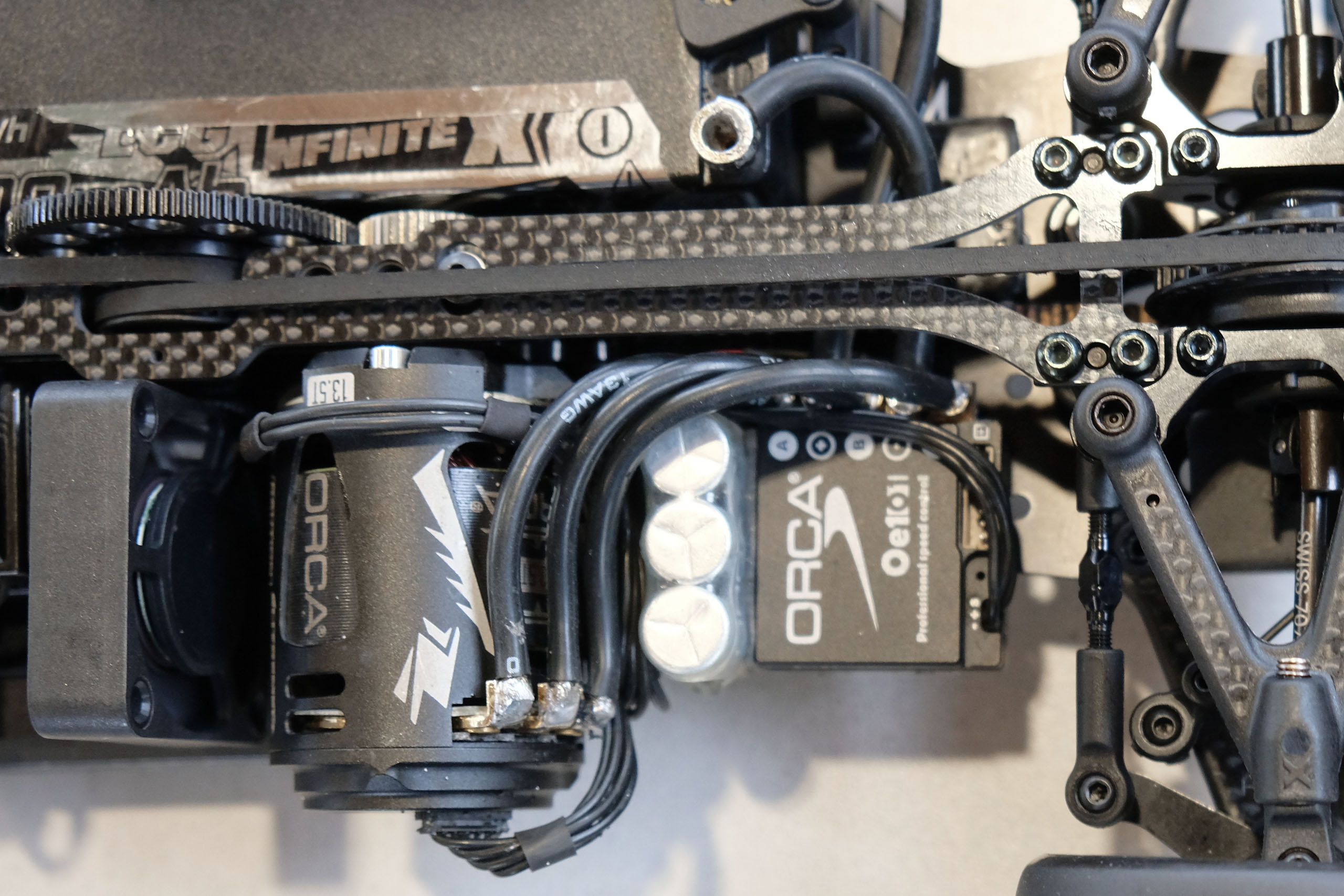
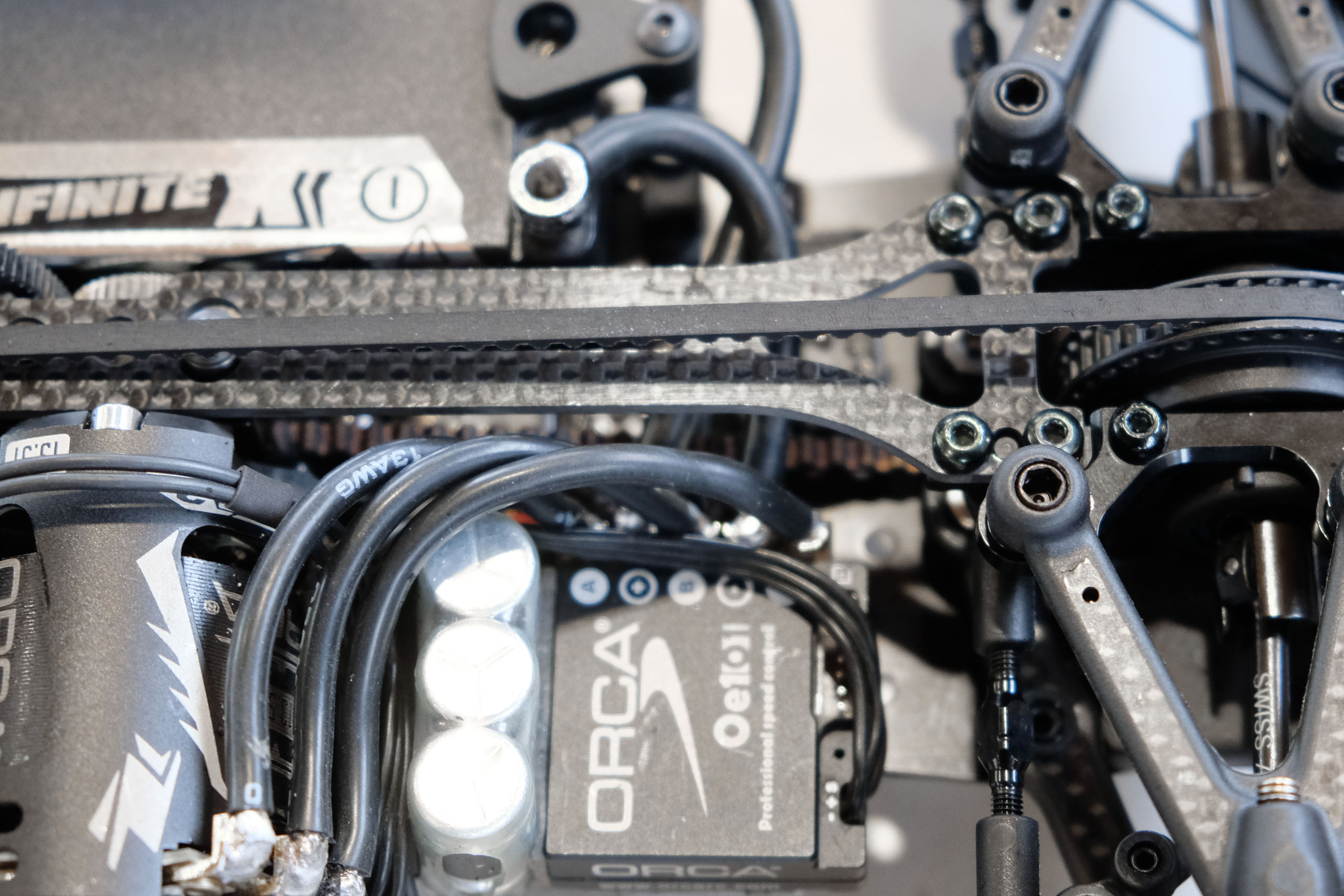
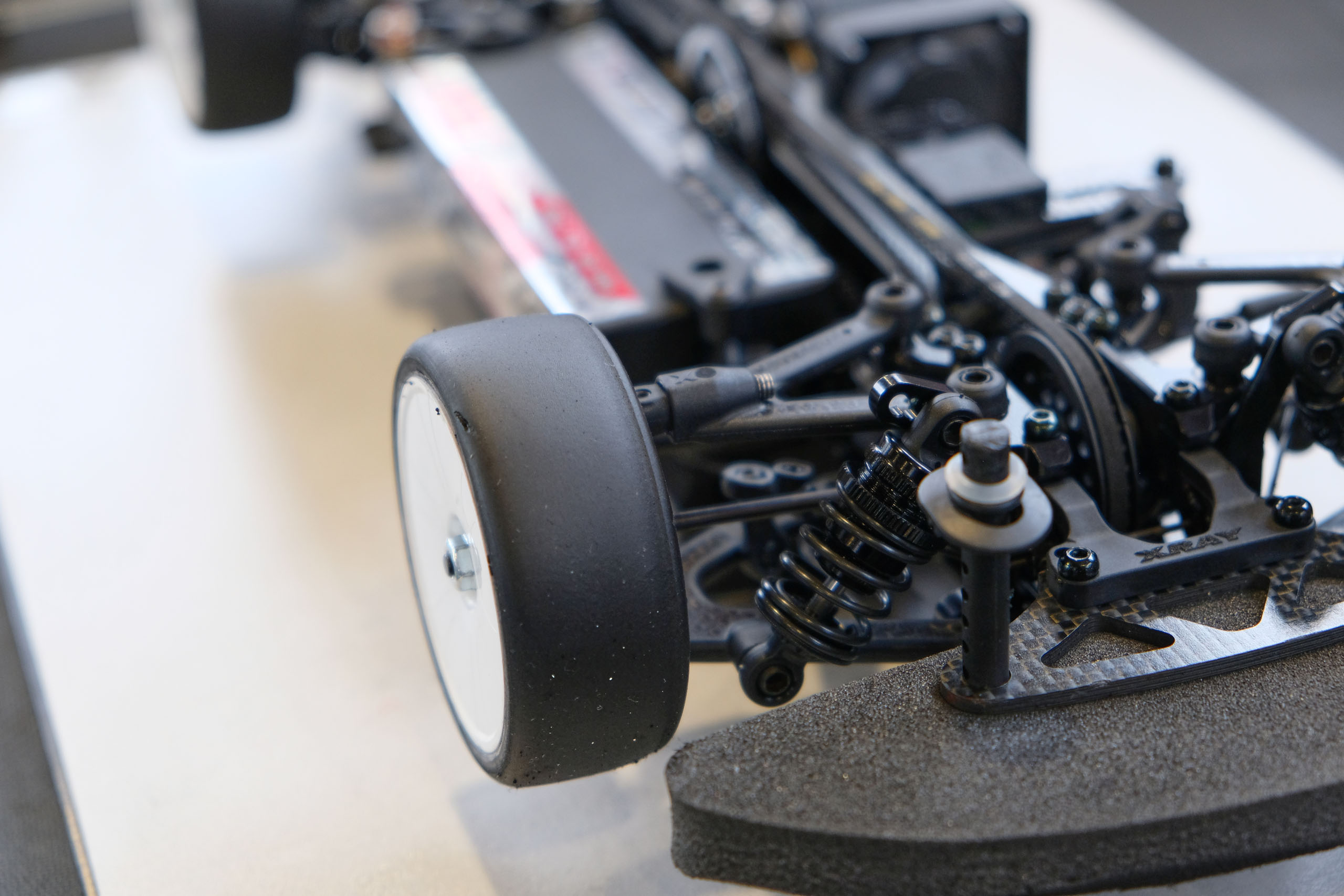
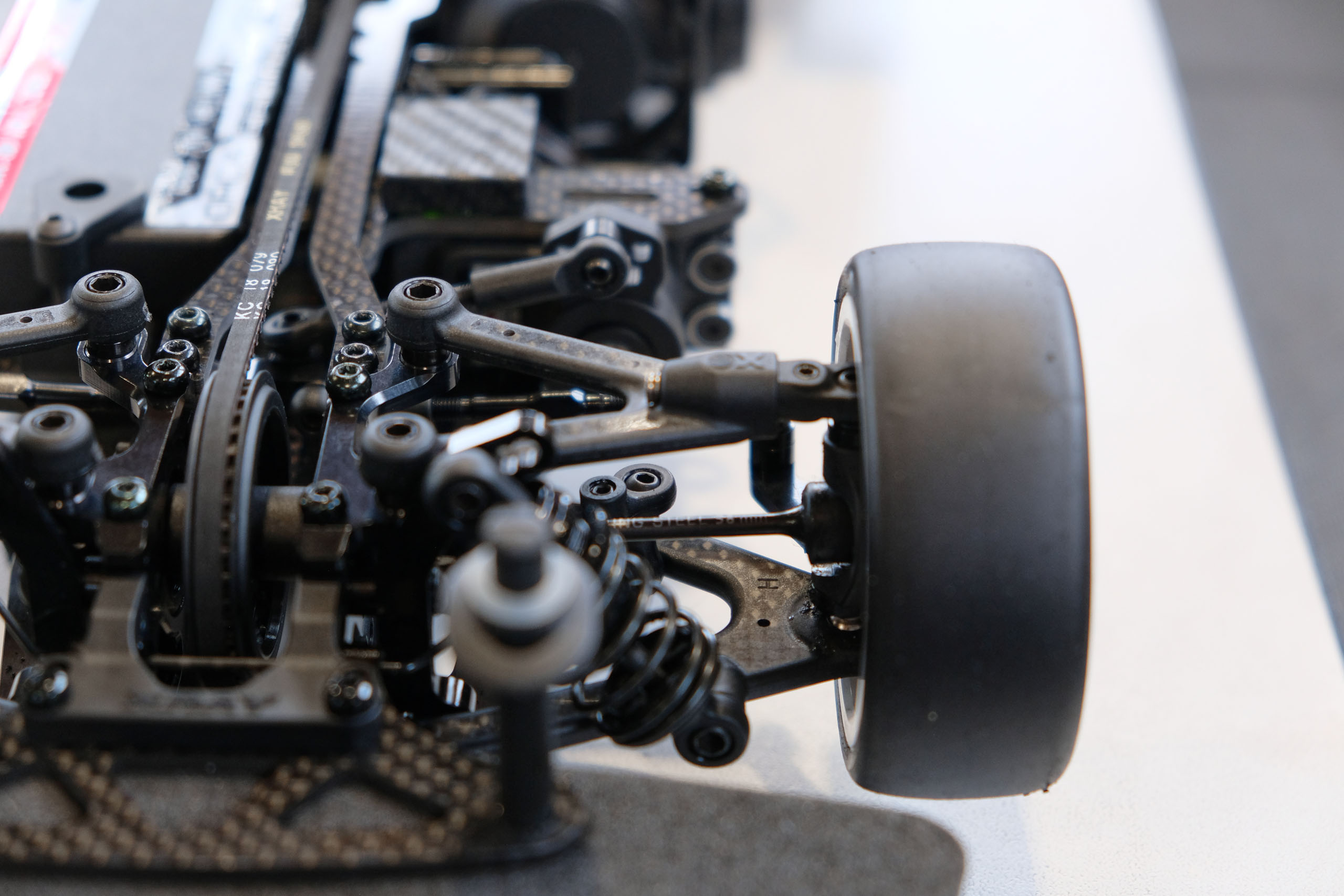
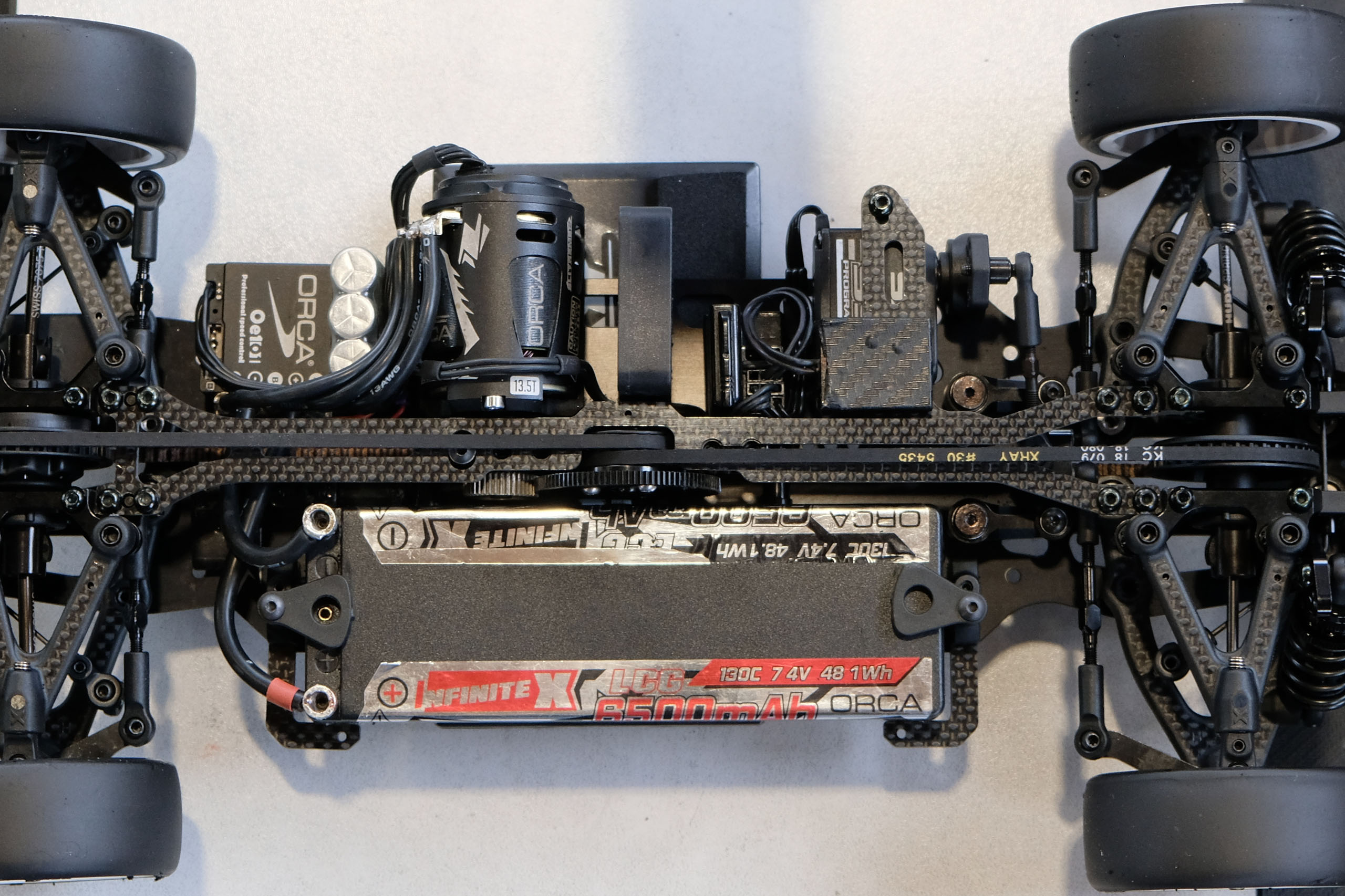
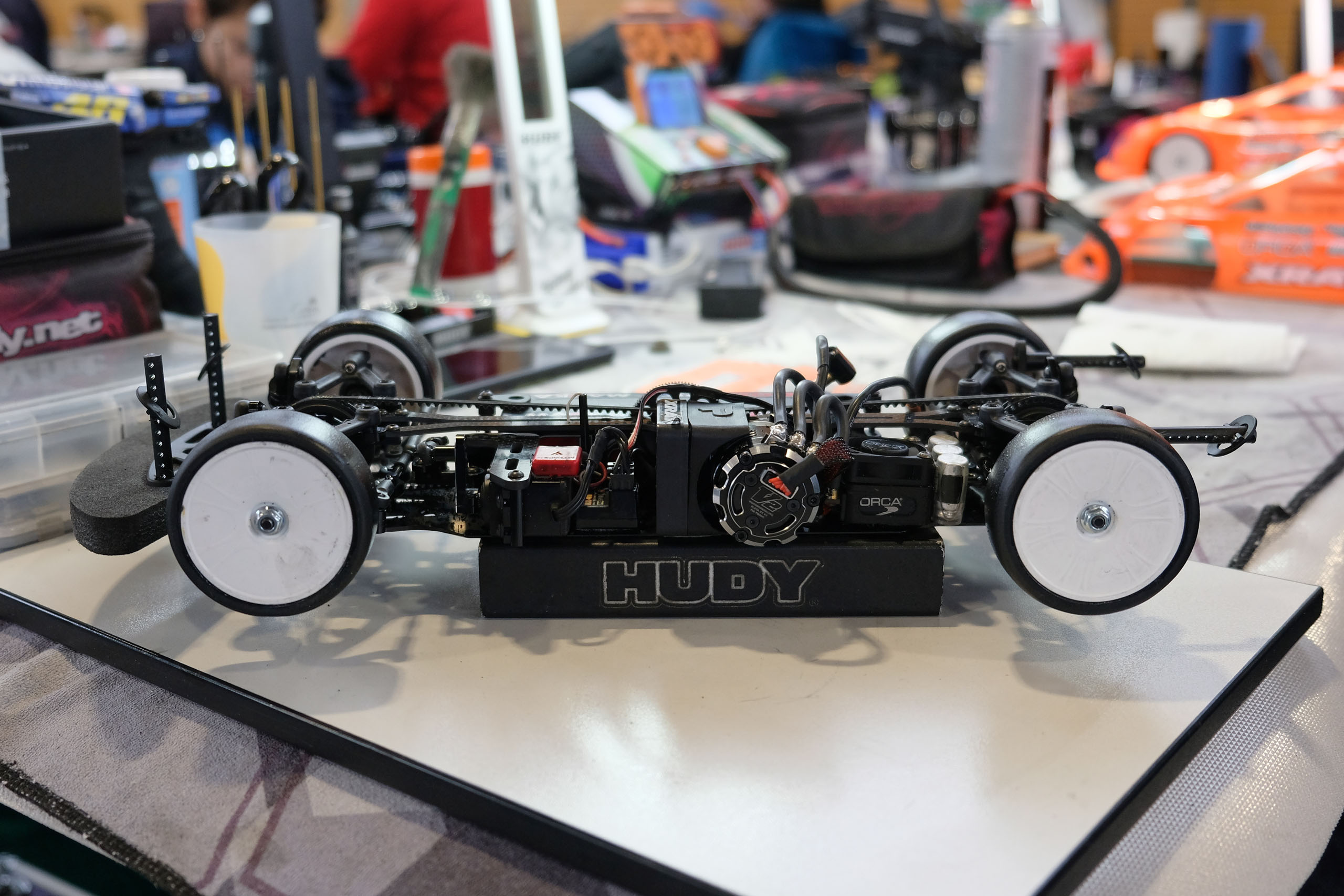
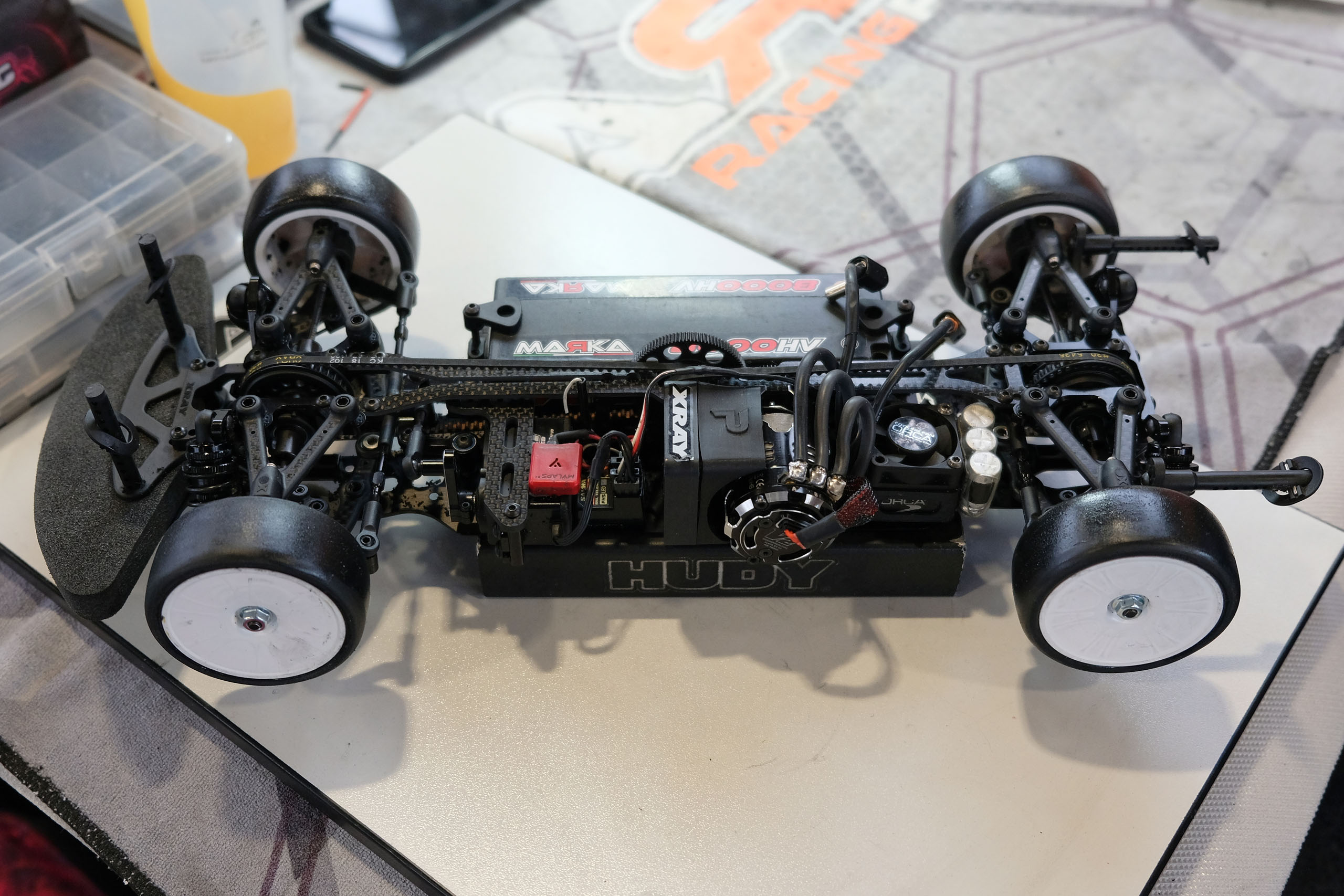
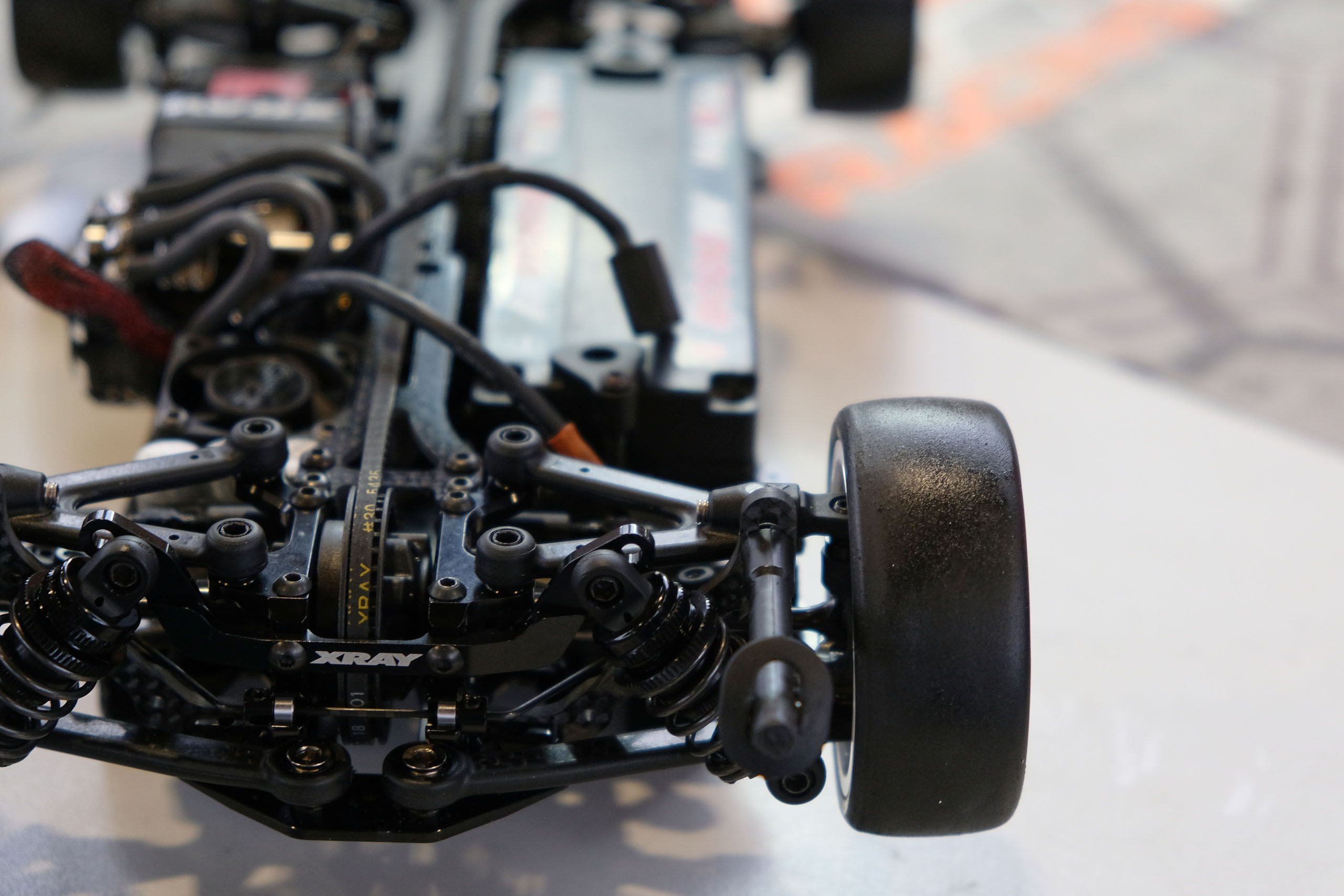
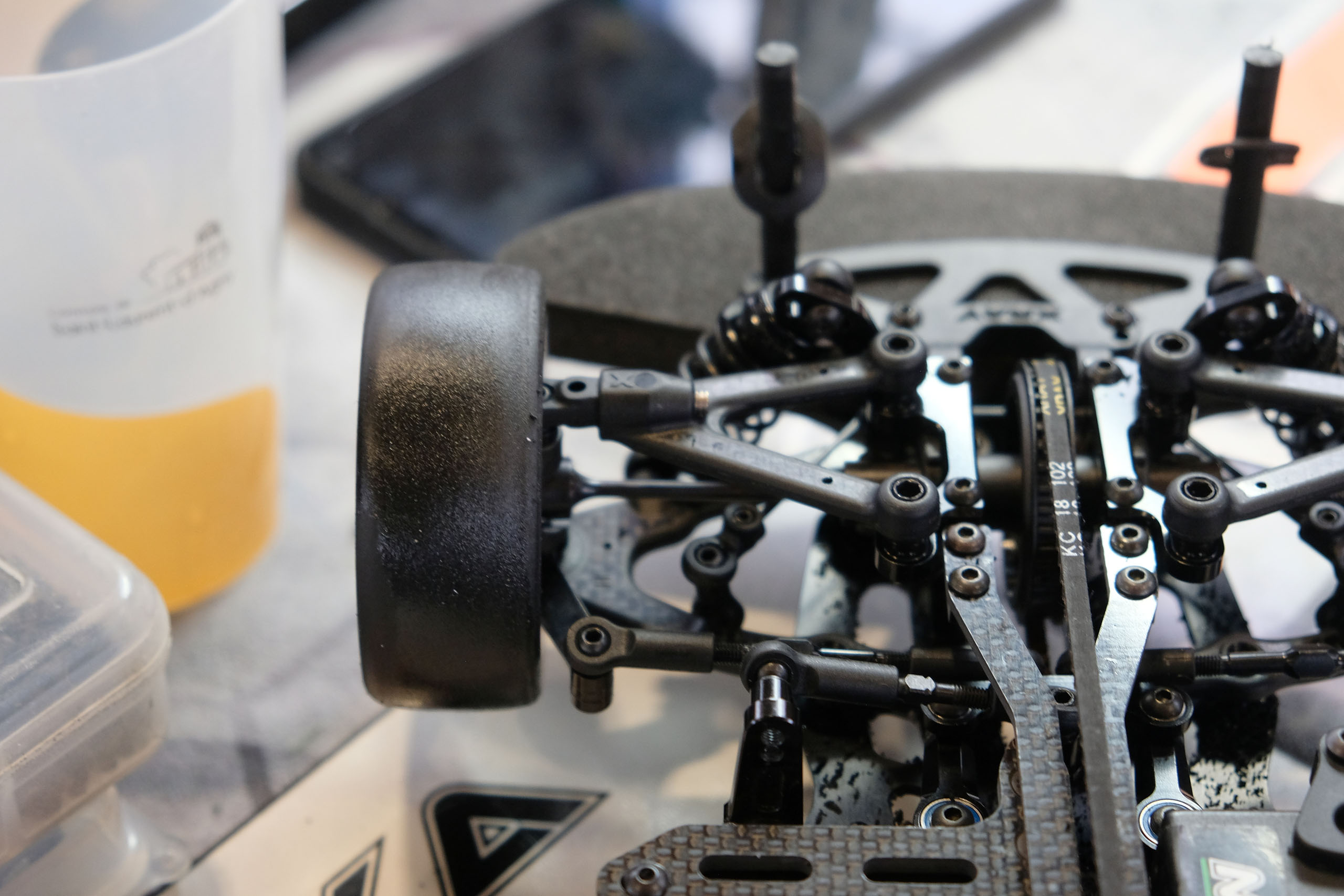
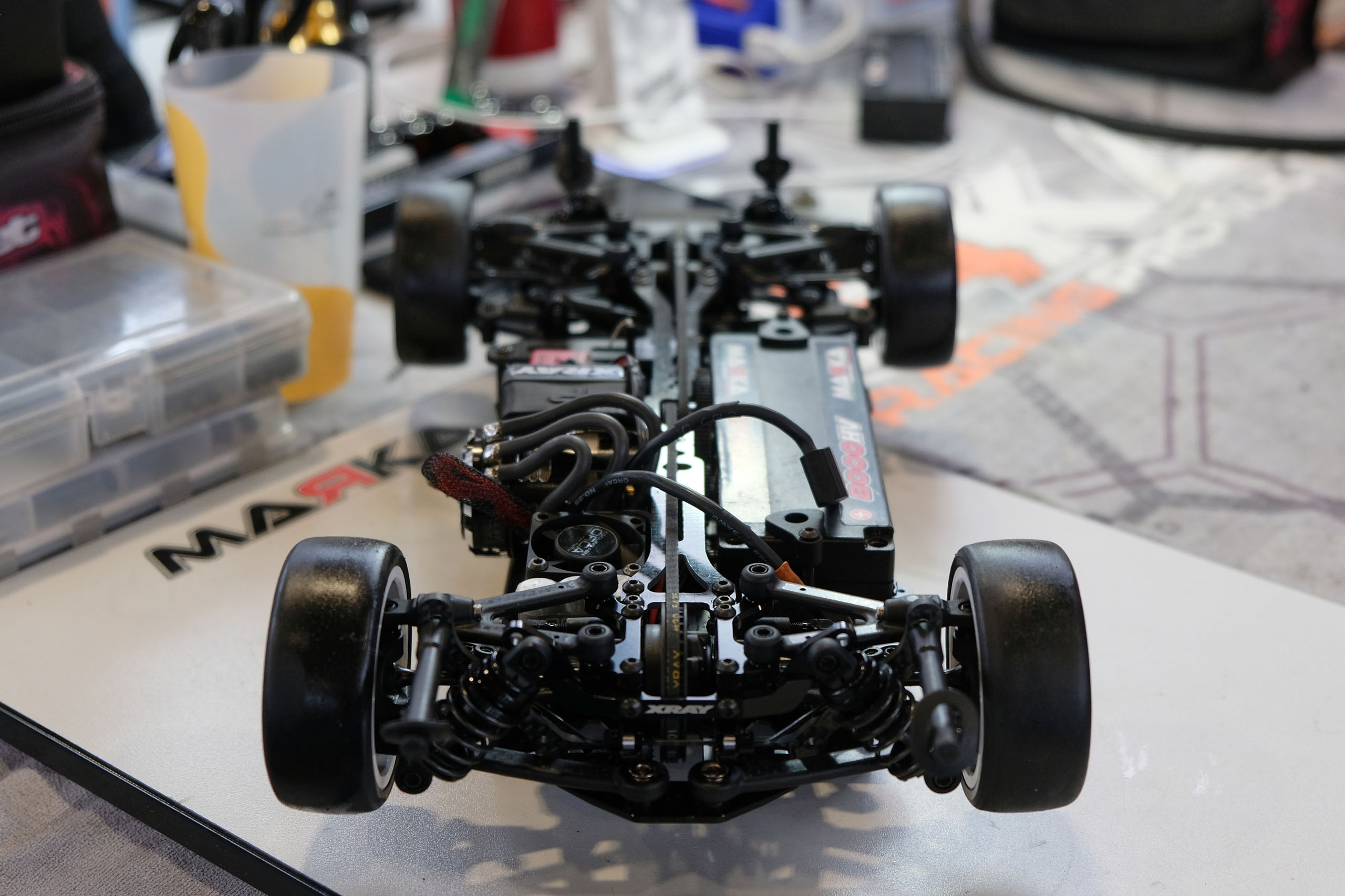
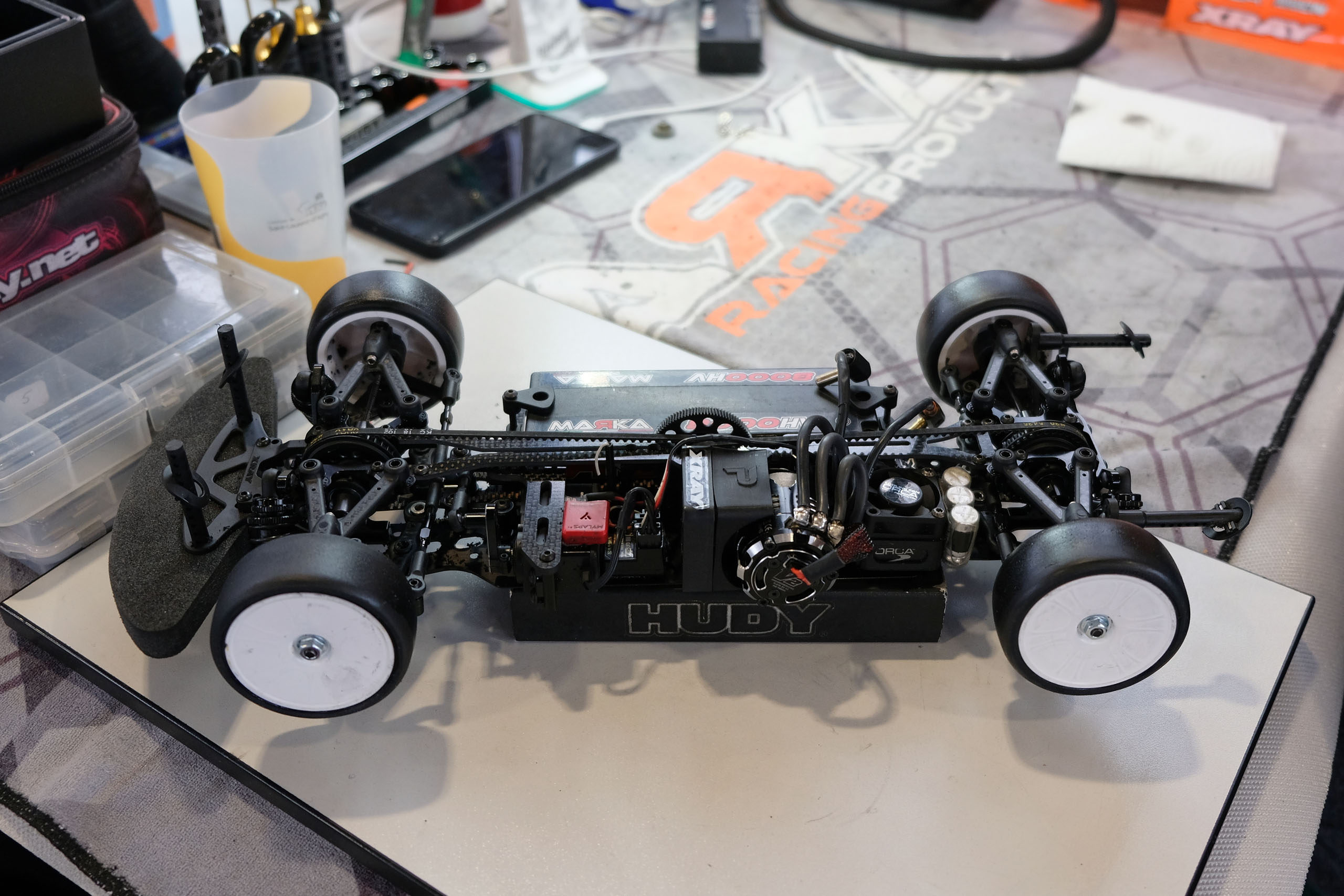
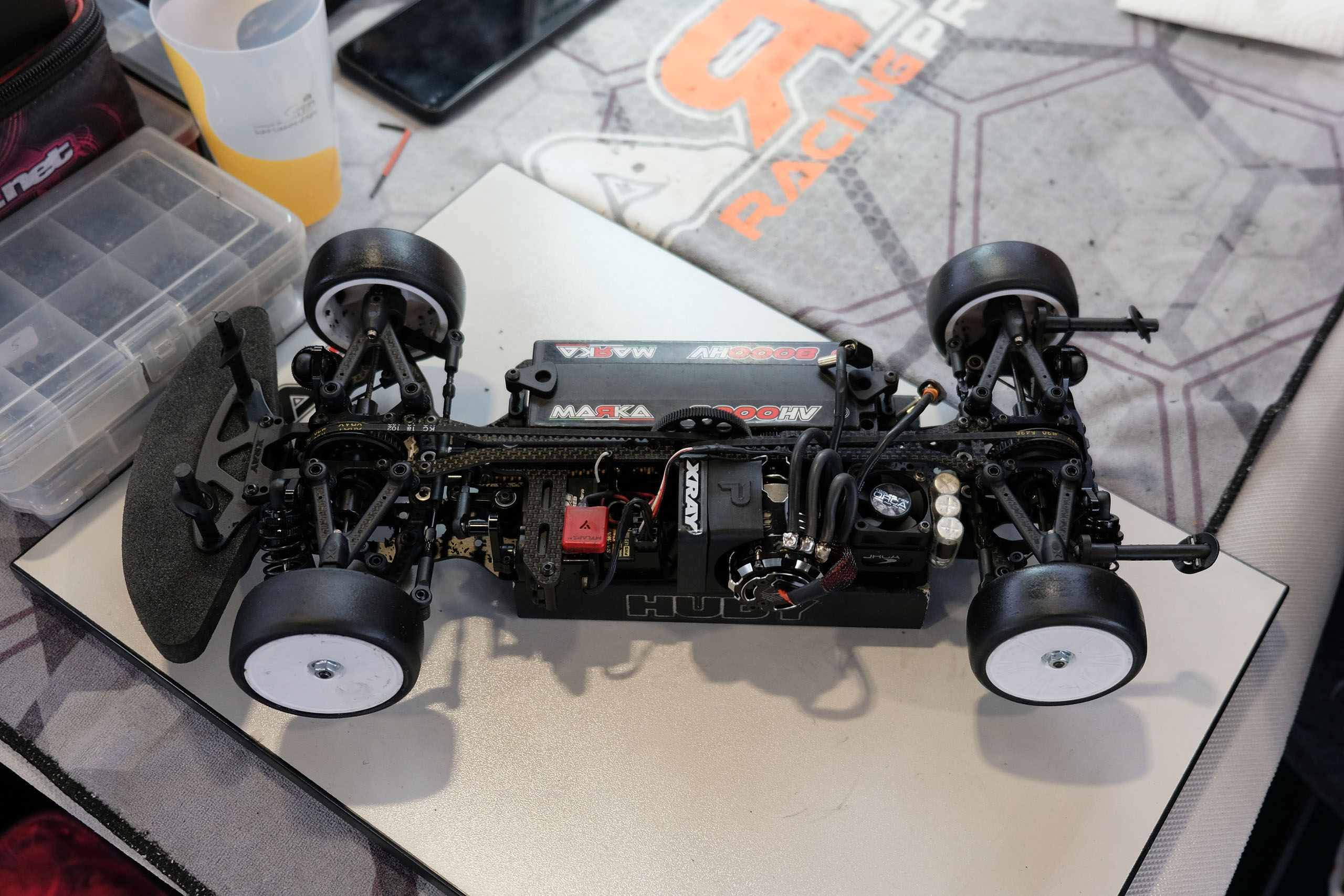
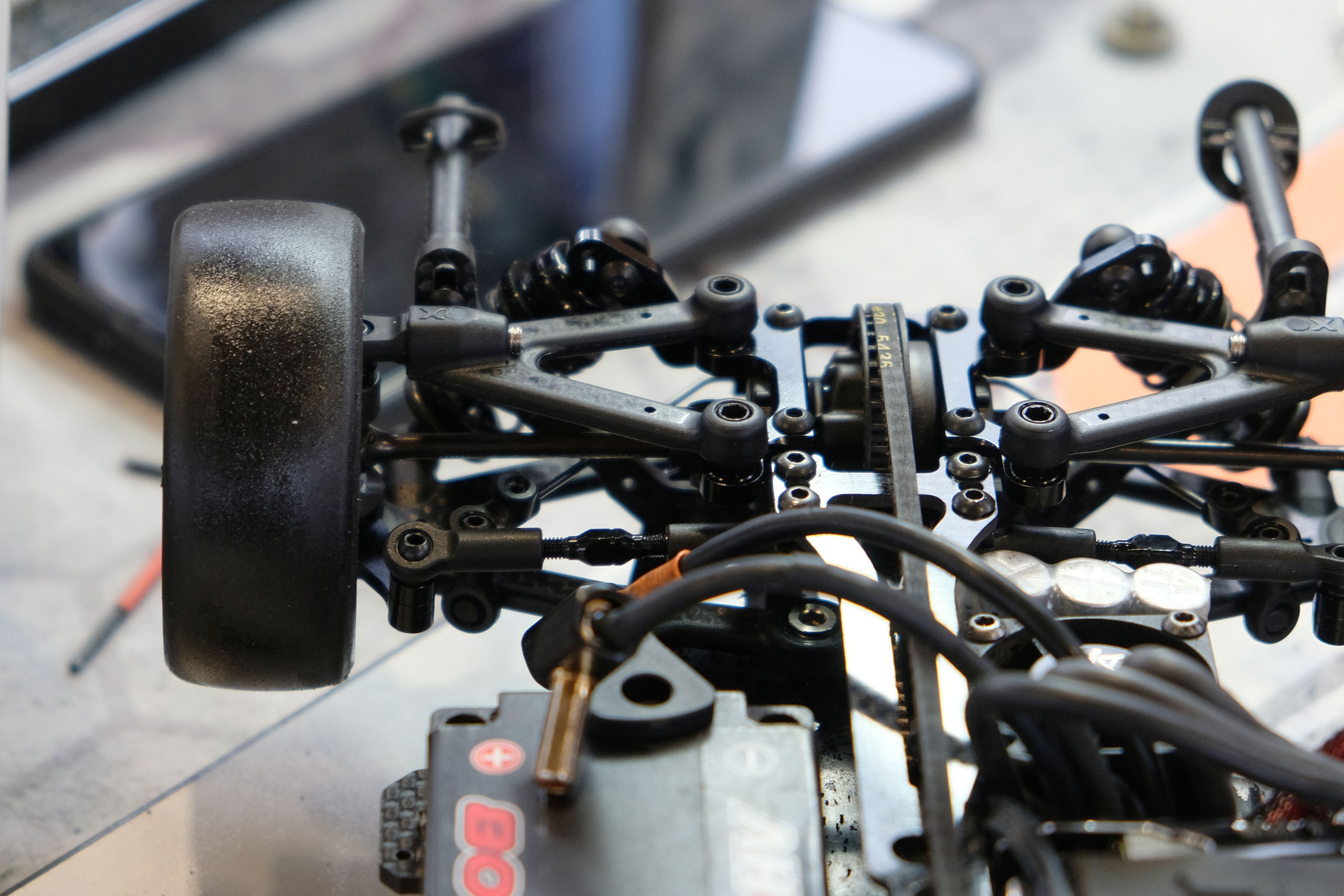
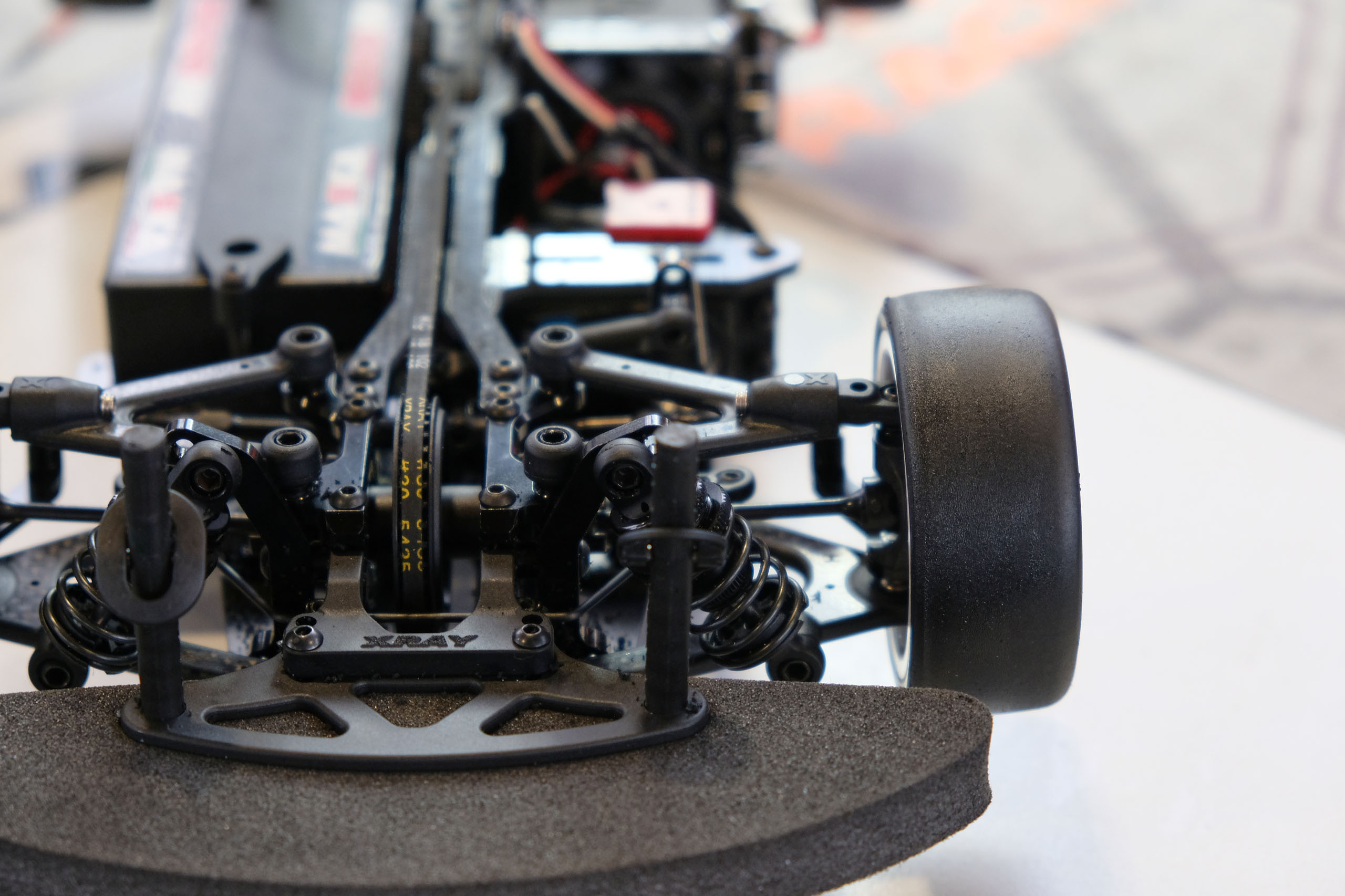
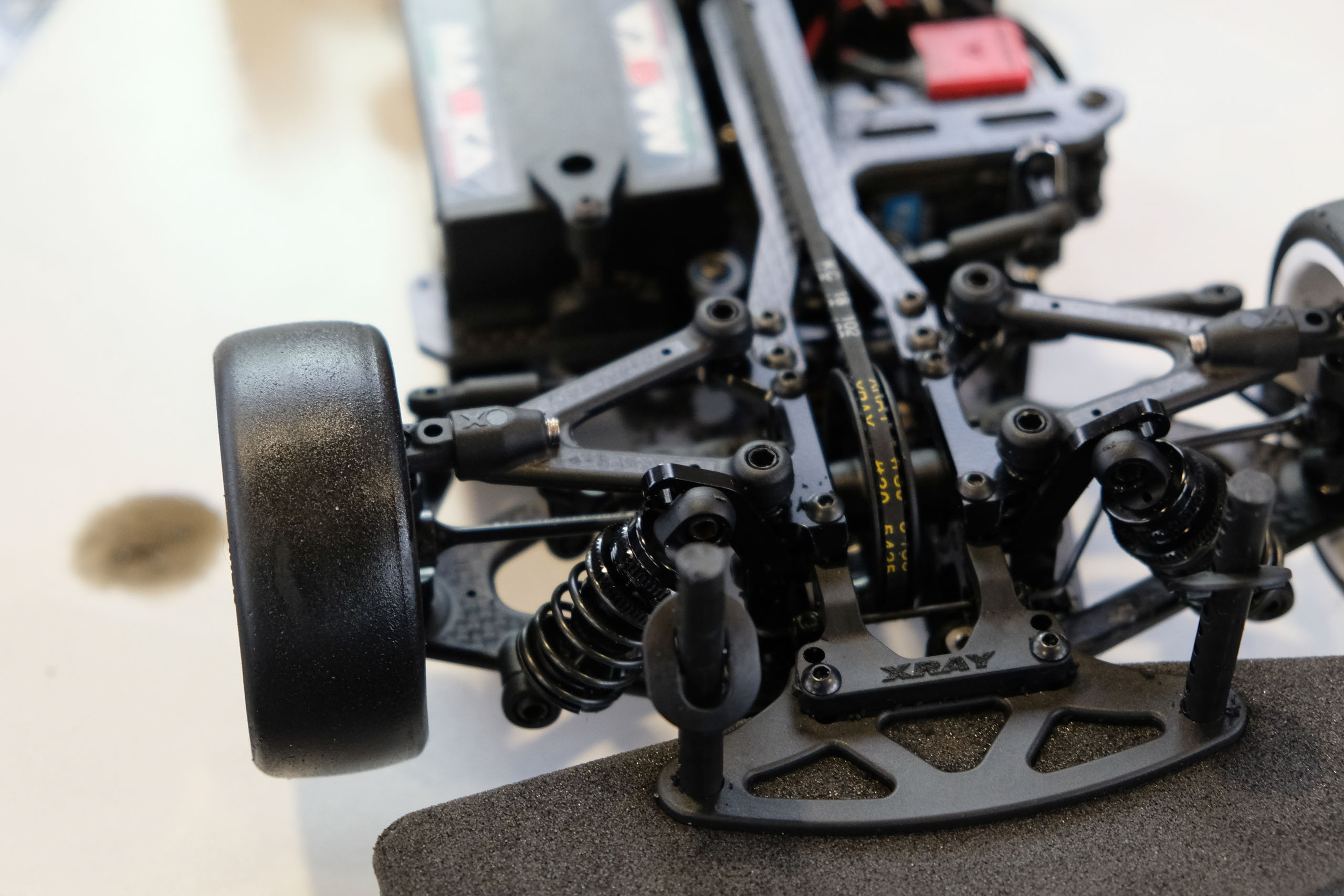
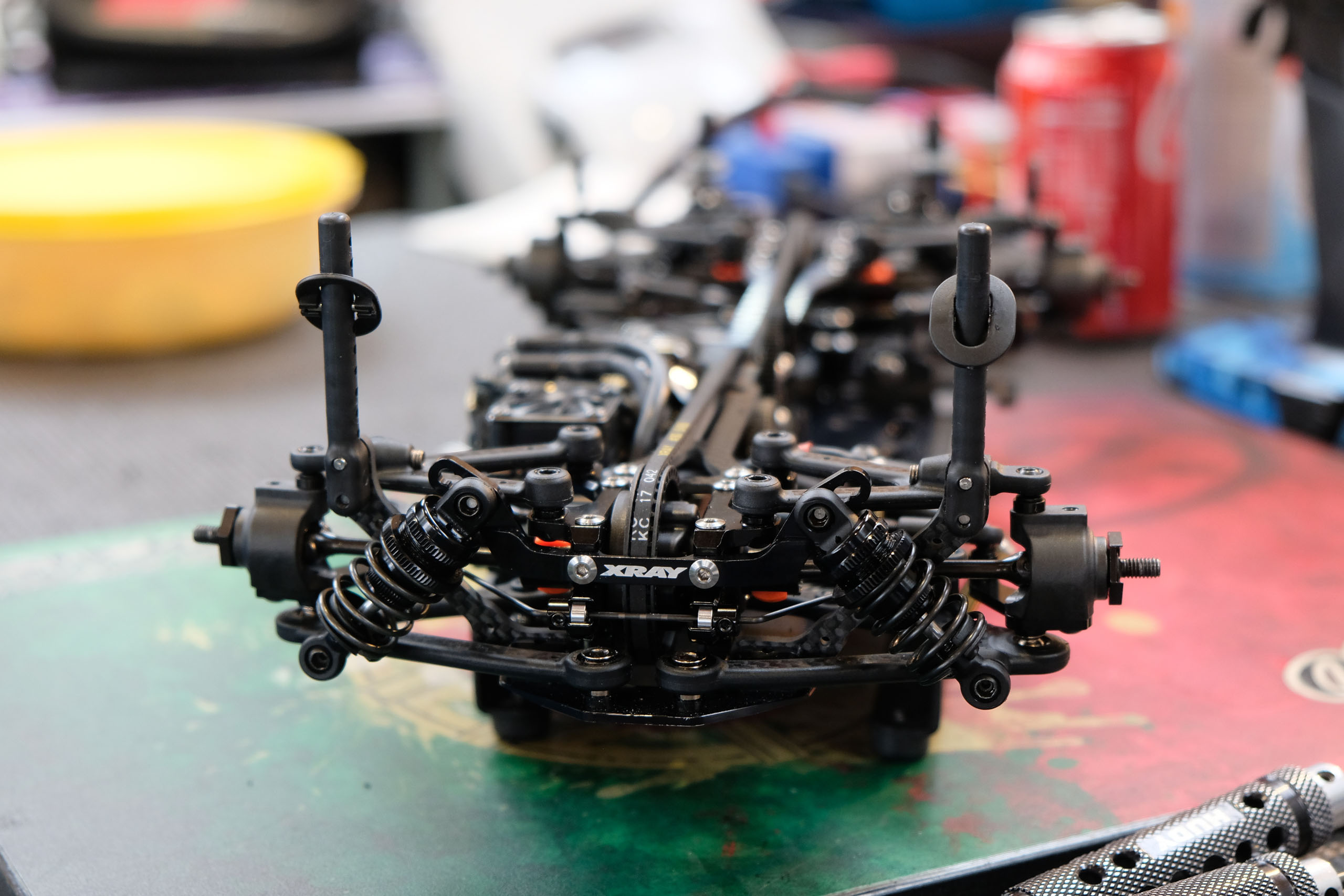
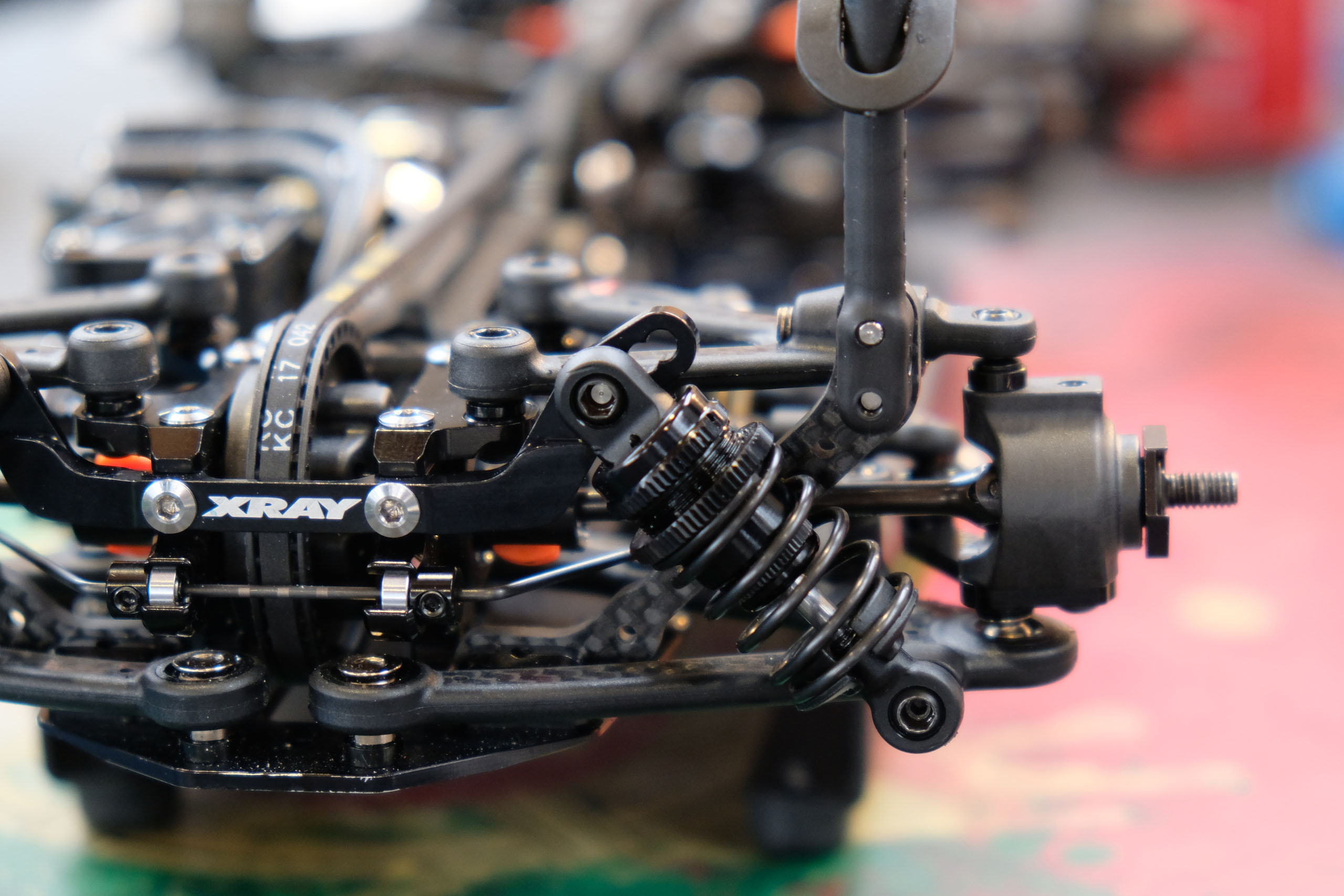
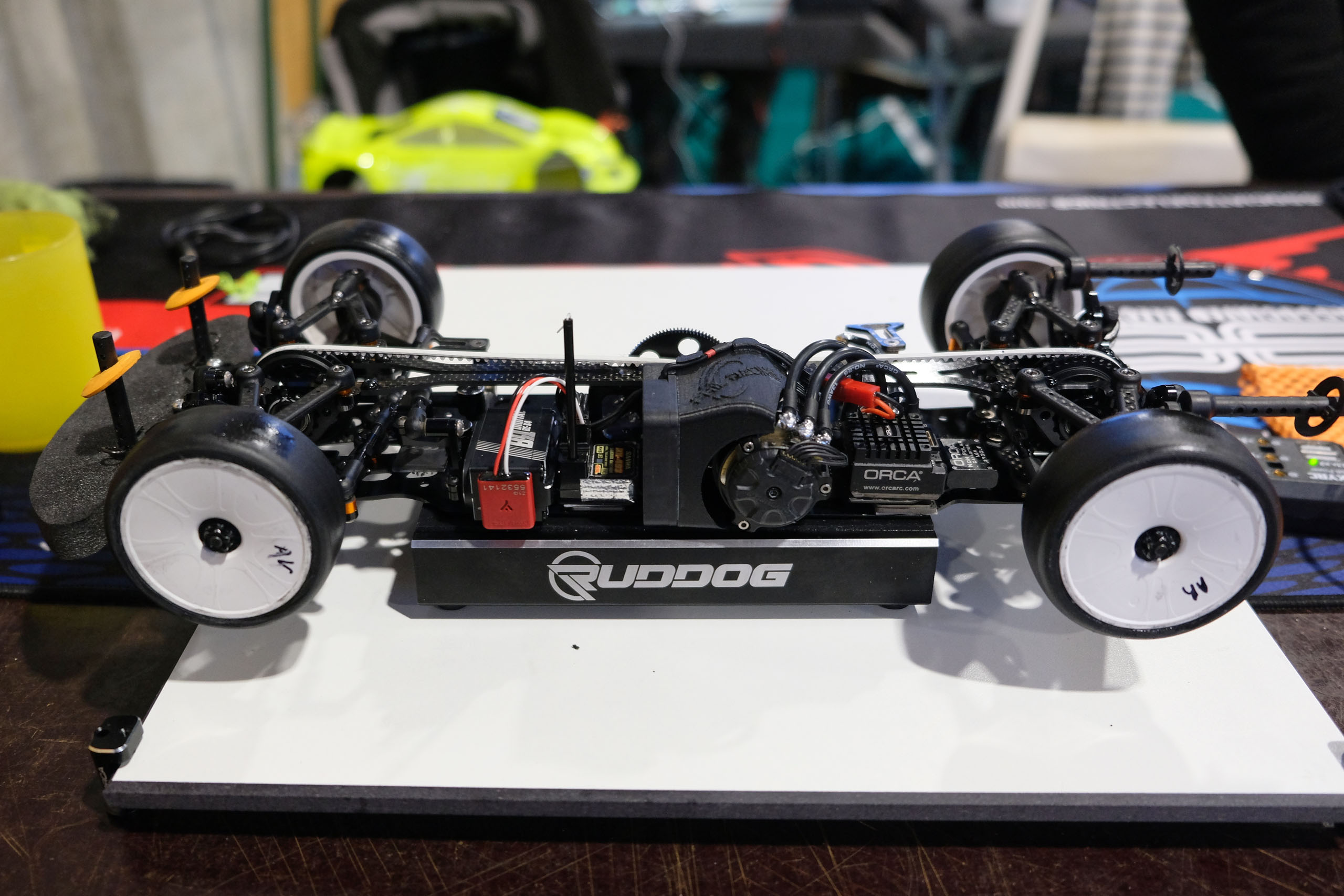
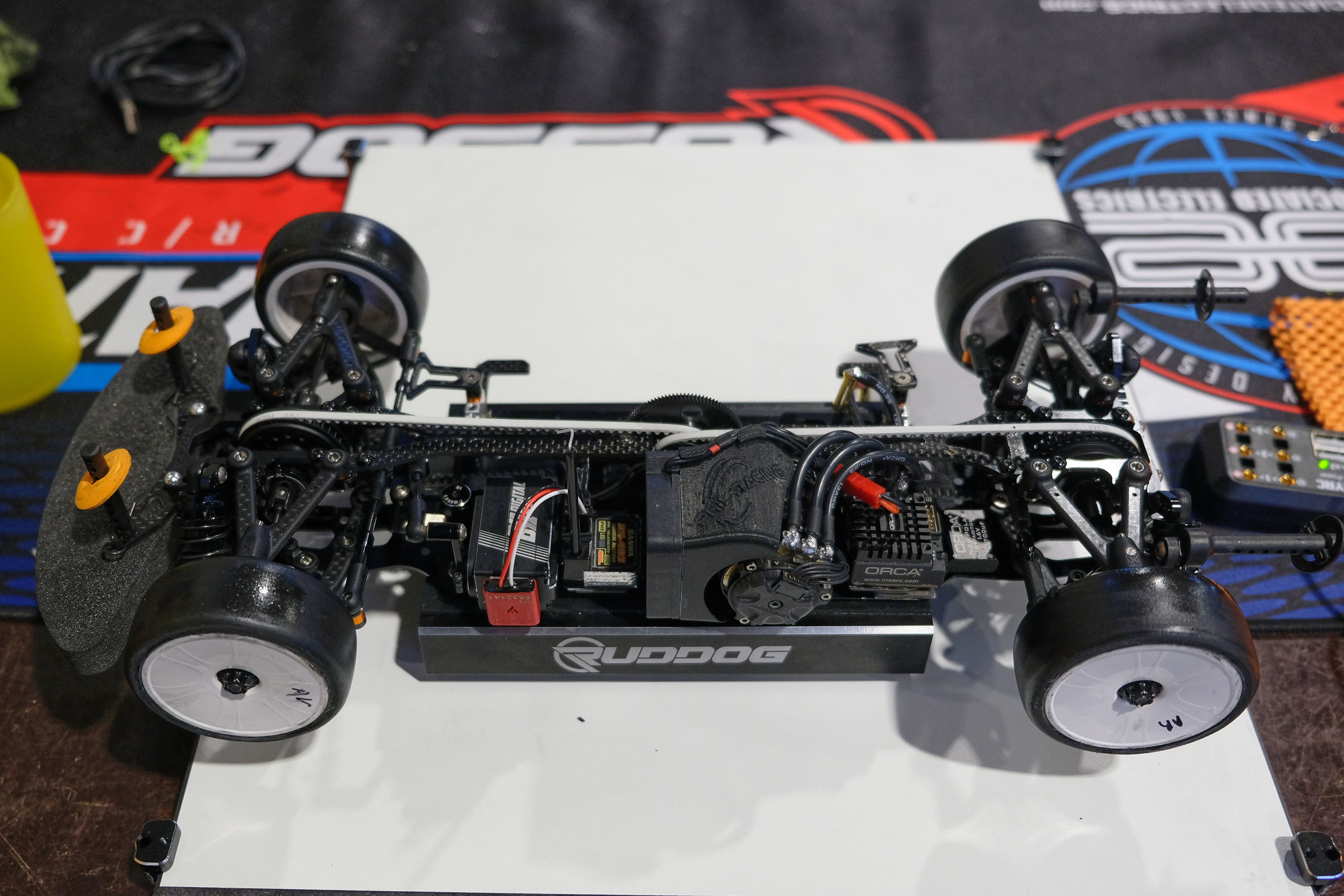
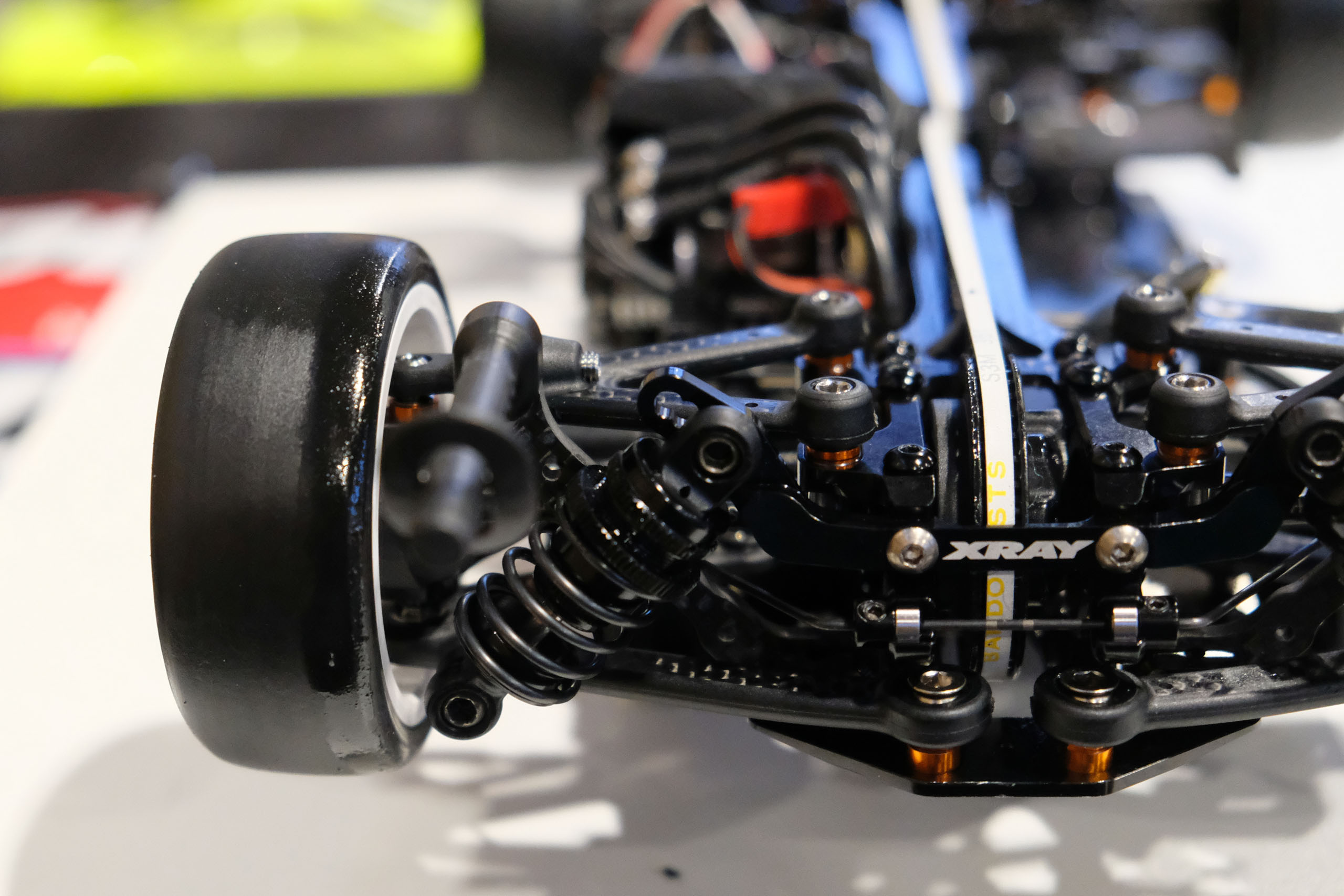
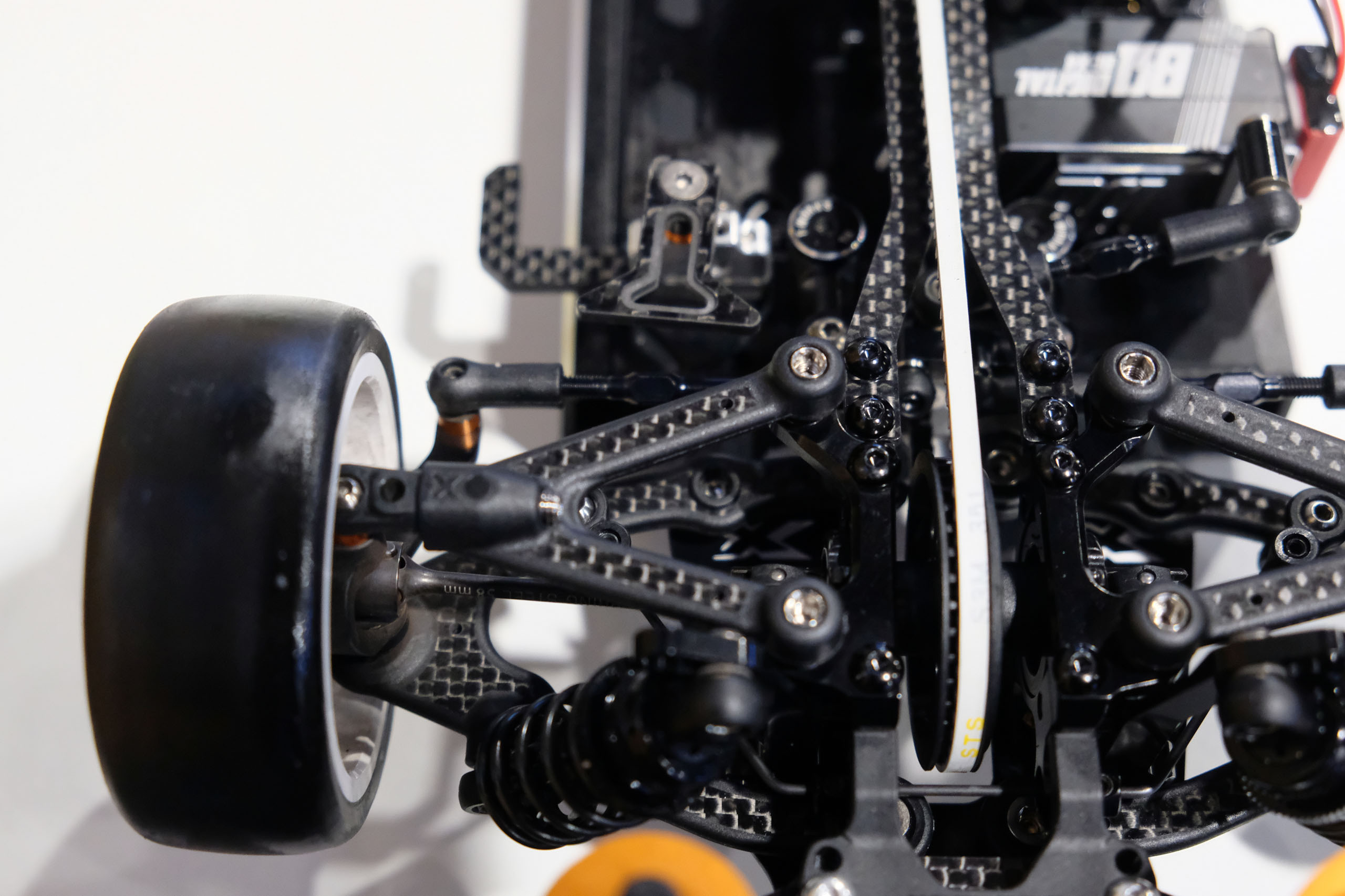
Technique Touring Car.La Team XRay X4 de Pierre Delorme.La dernière création du fabricant slovaque Team Xray suscite parfois des échanges enflammés sur certains forums et réseaux sociaux (que l'on ne commentera pas ici), mais étrangement, sur la piste, les pilotes de X4, relativement nombreux (presqu'un tiers du plateau en catégorie Touring Cars), semblent beaucoup plus sereins et globalement satisfaits de leur auto. Certes, tout n'est pas parfait (voir reportage sur la manche précédente) et l'auto a effectivement des défauts de jeunesse, mais les performances sont indéniablement présentes. Certes encore, cette auto n'a pas la robustesse légendaire des tanks qu'étaient les précédentes générations de T4, ni leur facilité d'usage, et son prix atteint certes des sommets, mais quel bel objet! A l'heure de l'écriture de cet article, des versions renforcées V2 ont été annoncées pour les bras des porte-fusées avant et arrière 302392 et 302393 et les pièces d'ancrage des biellettes de direction sur les cellules 301570. A noter qu'elles portent les mêmes numéros de référence que les pièces originales, ce ne sont pas des pièces optionnelles. Prudence donc lors des commandes! Le poleman et vainqueur de la finale A en catégorie Touring Car 13.5T Open, Pierre Delorme, pilote officiel Team XRay, BittyDesign et Orca et multiple fois champion de France en catégorie Touring Car Stock, roulait avec une X4 équipée d'un châssis en aluminium. On remarquera quelques astuces de montage déjà connus sur la T4, à l'image des vis à tête de plus grand diamètre pour les renvois de direction, et d'autres, comme les points de couleur sur les triangles supérieurs pour identifier les rapidement (ça marche très bien aussi sur les Awesomatix et les Mugen...). Comme l'intégralité des pilotes, Pierre Delorme roulait avec les cardans à blade en plastique, et non avec les versions à roulements disponibles en option (probablement pas encore disponibles à la date de la course?). A remarquer aussi l'emploi du sauve-servo d'origine Team XRay, un accessoire qui recommence à être utilisé en compétition sur moquette à forte adhérence. Ce pilote étant sponsorisé par BittyDesign, son choix de carrosserie s'est porté ici sur le modèle Hyper HR ULT. Toute la partie puissance, moteur, contrôleur et batterie, est naturellement confiée à Orca. Le contrôleur Oe101, remarquable par compacité et sa faible hauteur, et dédié aux classes Stock Blinky et Open, ne semble pas nécessiter de refroidissement par un ventilateur dédié. Le moteur est un Blitreme2 13.5T. La partie radio et servo sont de marque Sanwa. La fiche du set-up utilisé par ce pilote lors de cette course est déjà disponible sur le site PetitRC.com. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
La Team XRay X4 de Jérémy Limoges.L'auto visible ci-dessous, avec châssis en aluminium et sensiblement d'origine, est celle du pilote montbrisonnais Jérémy Limoges, qui finira quatrième de la finale A en catégorie Touring 13.5T Open. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
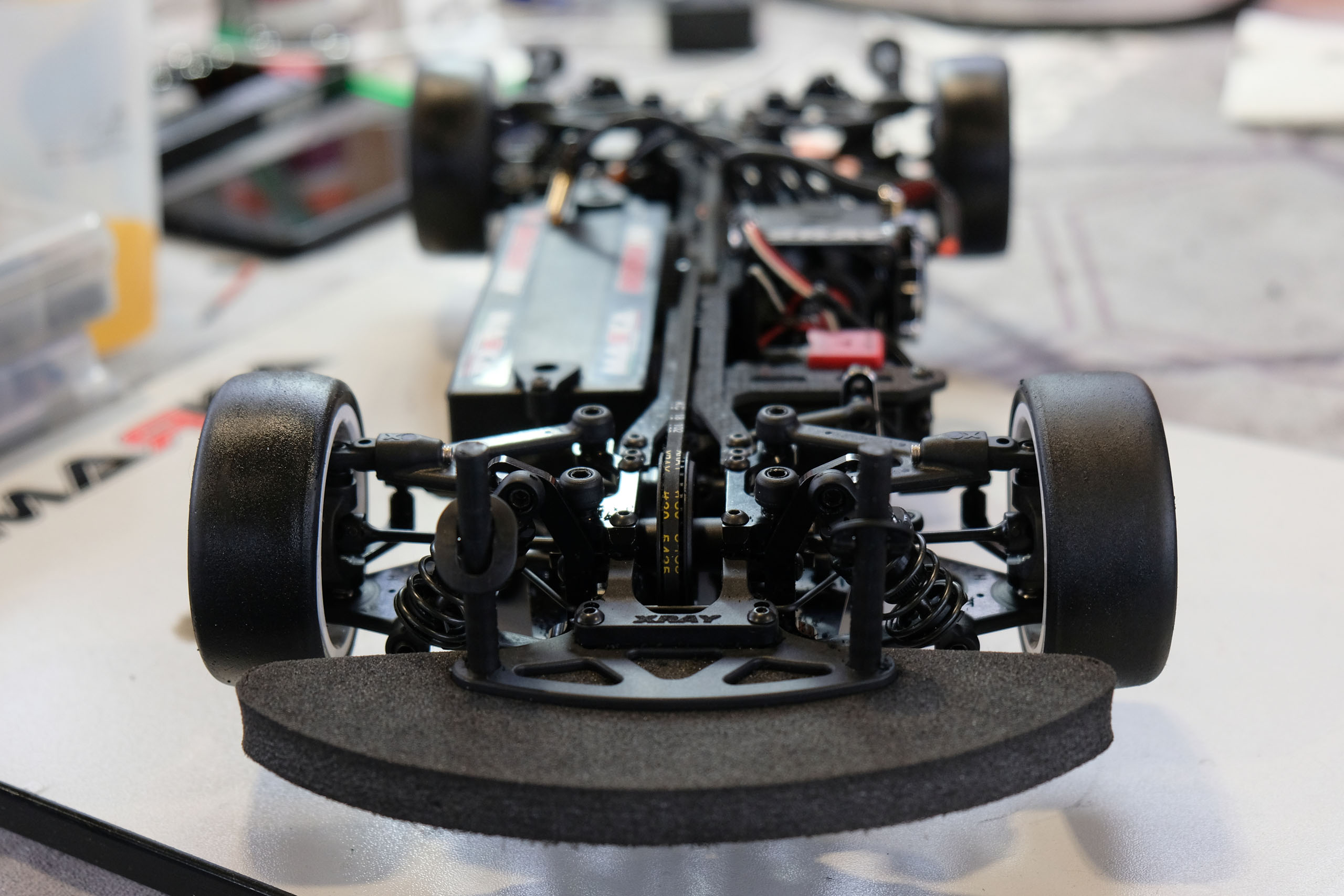
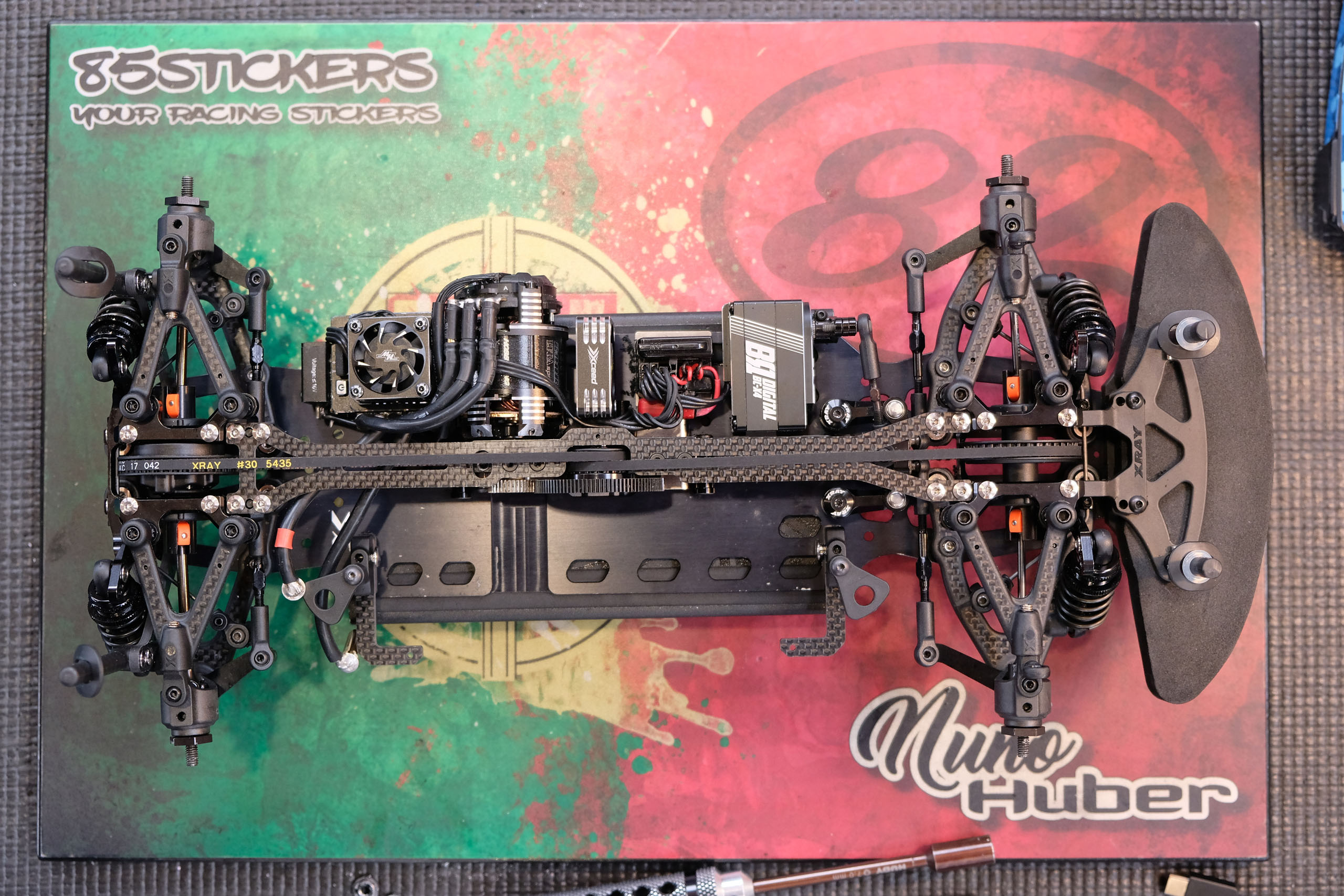
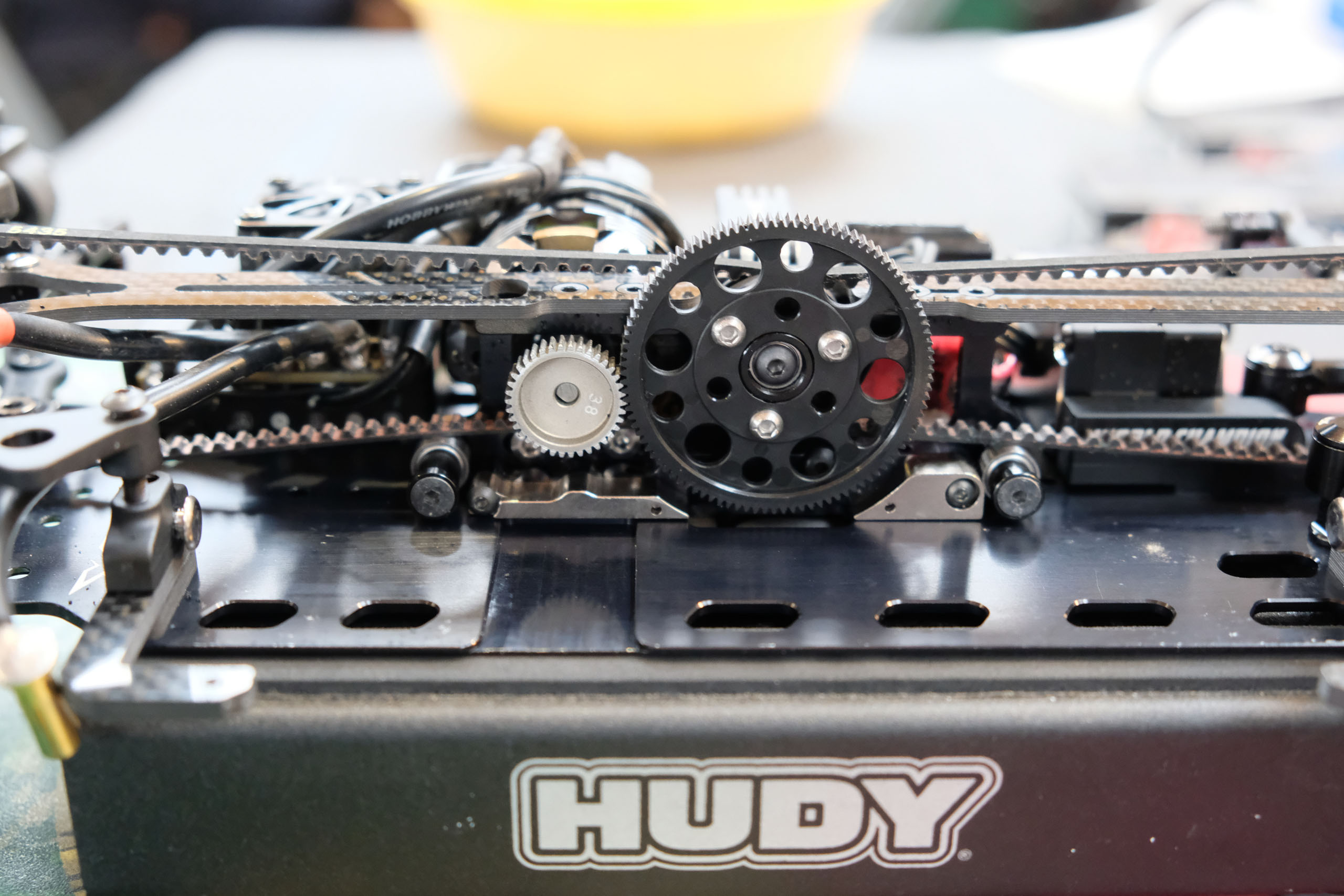
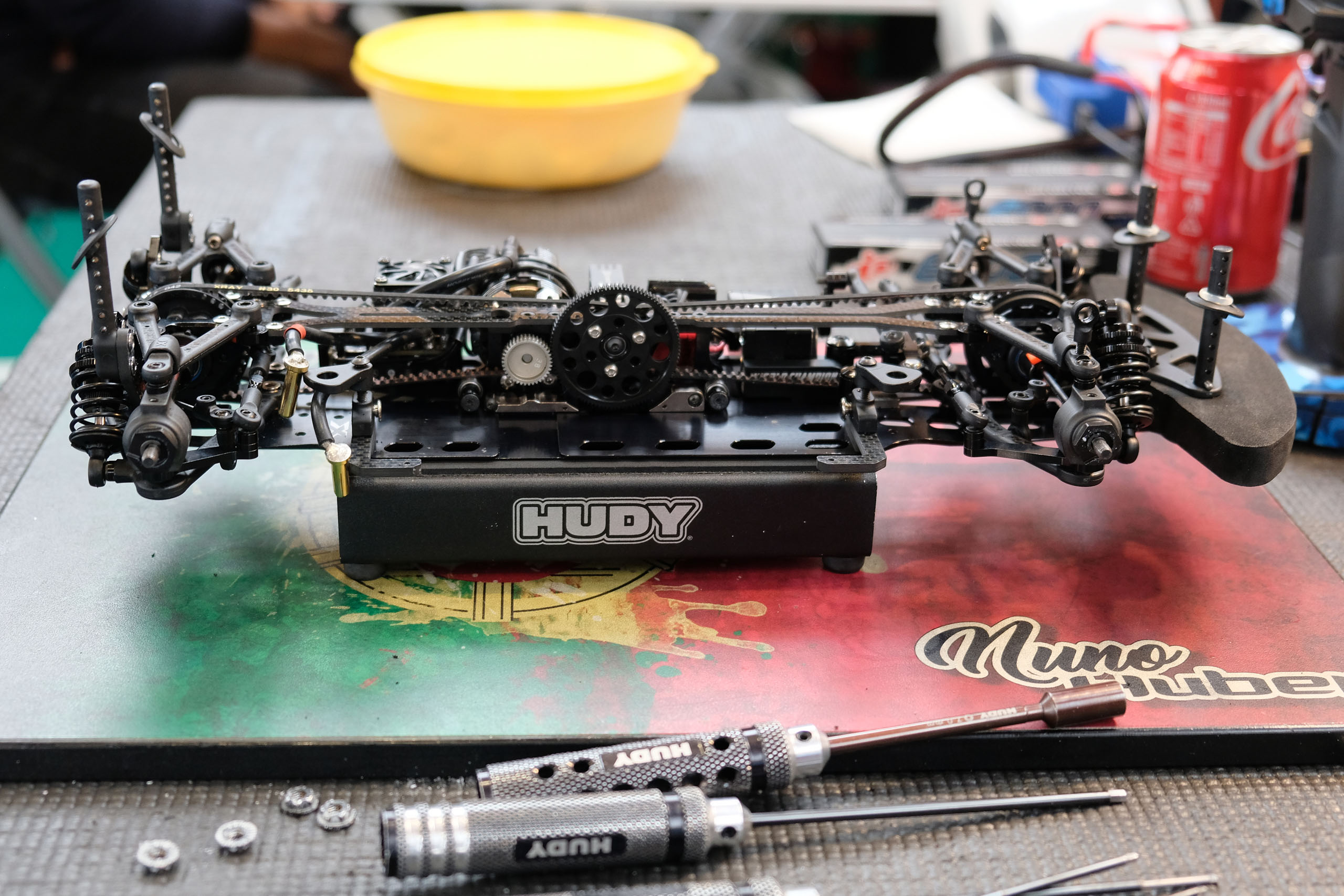
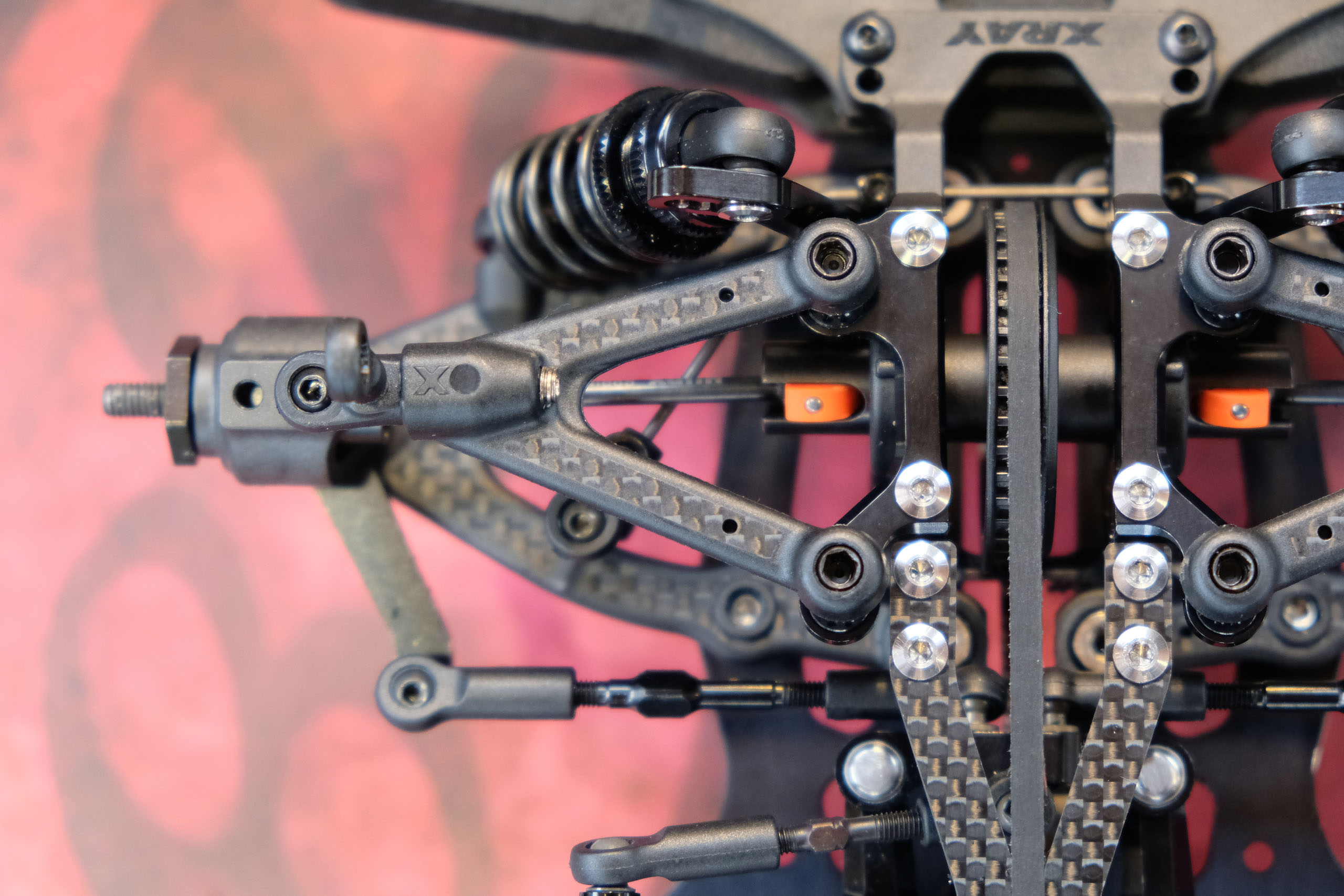
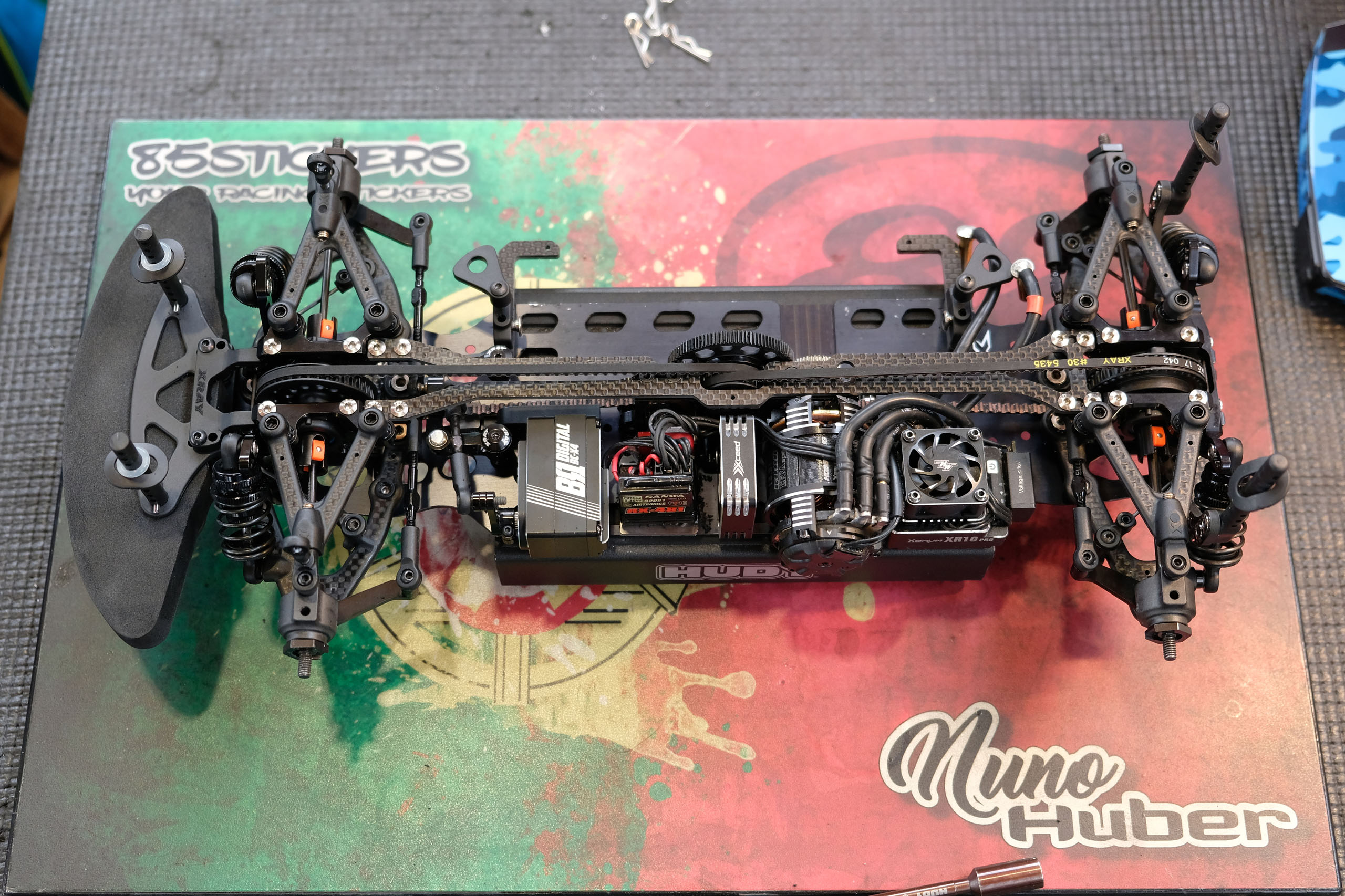
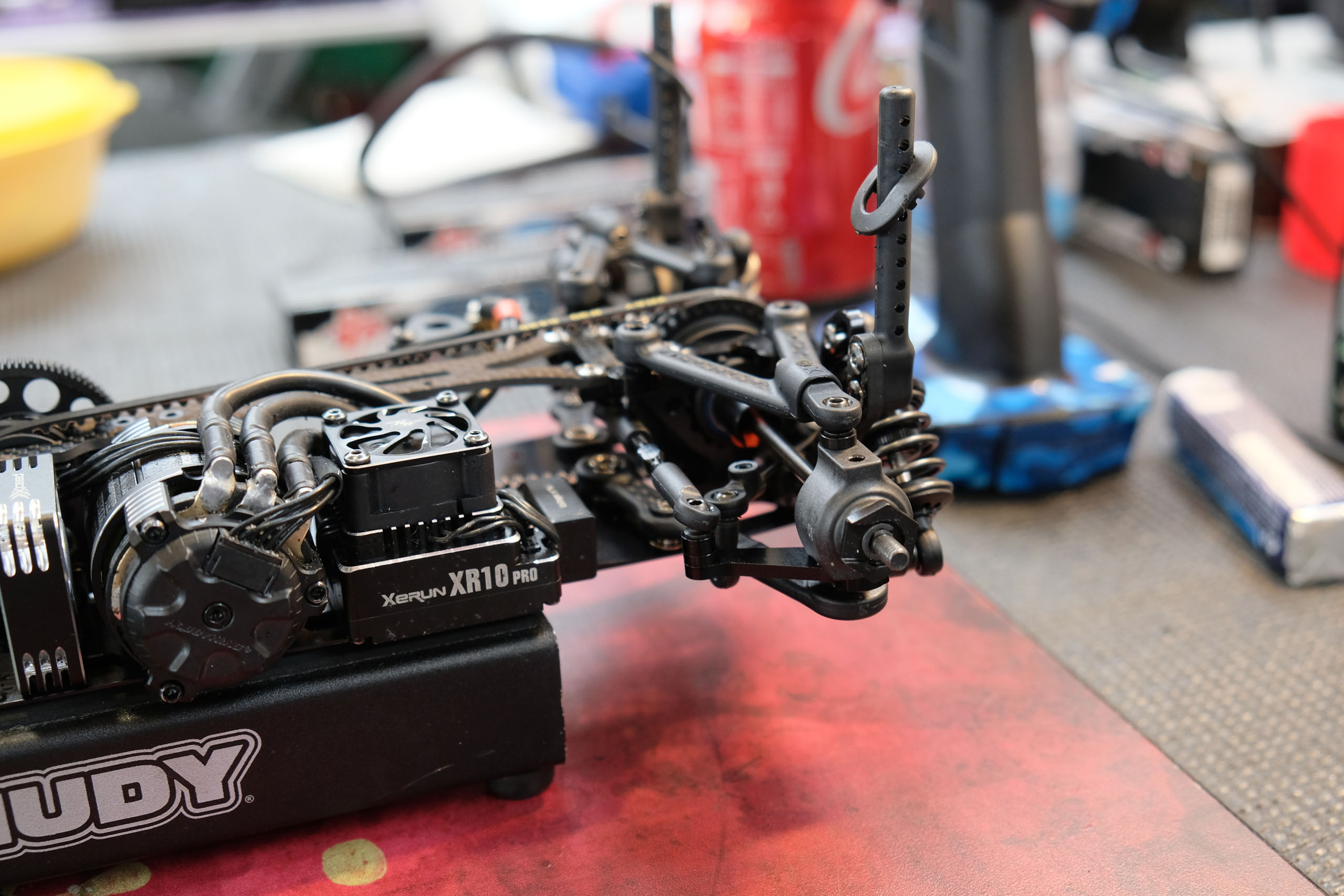
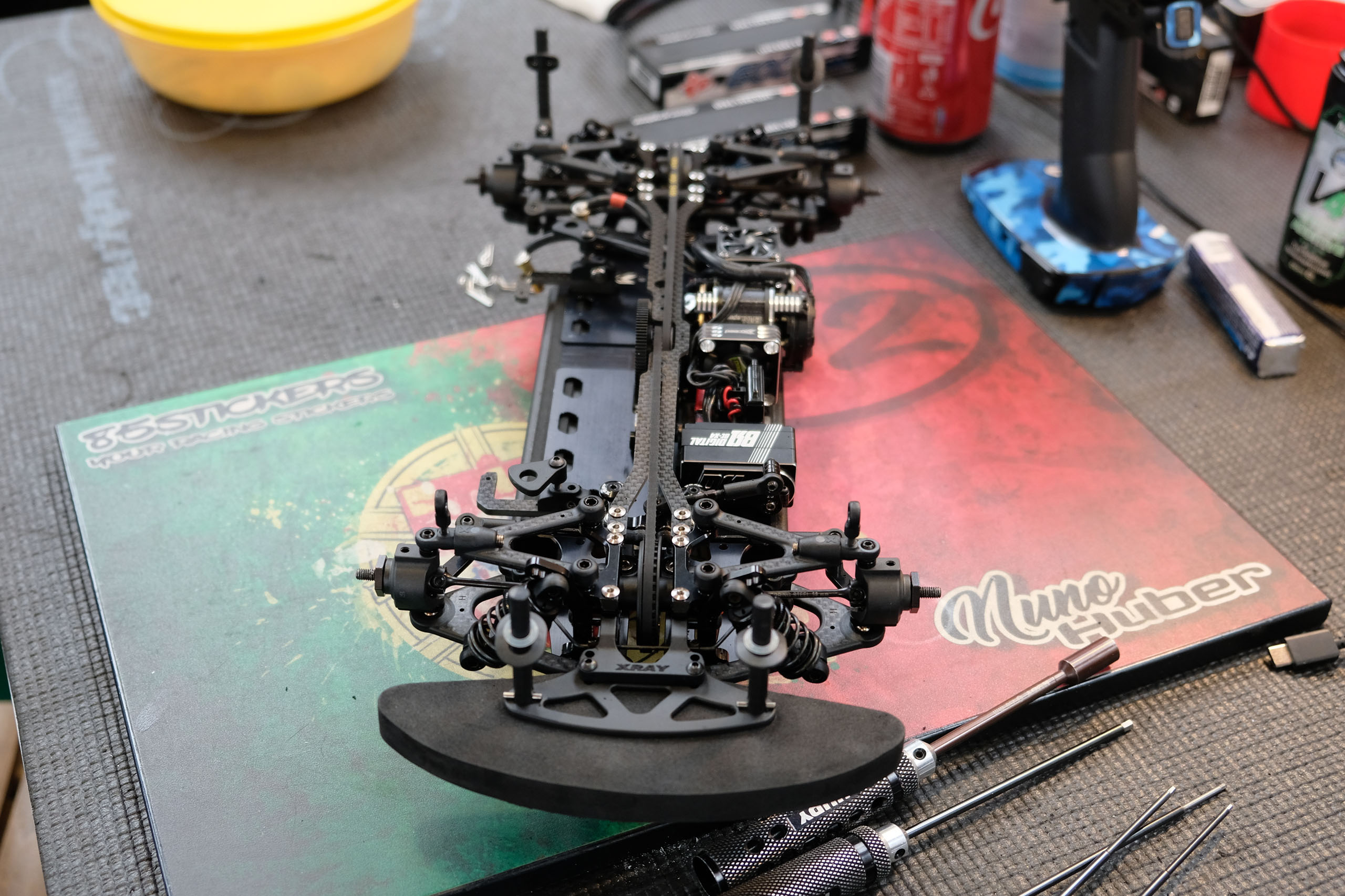
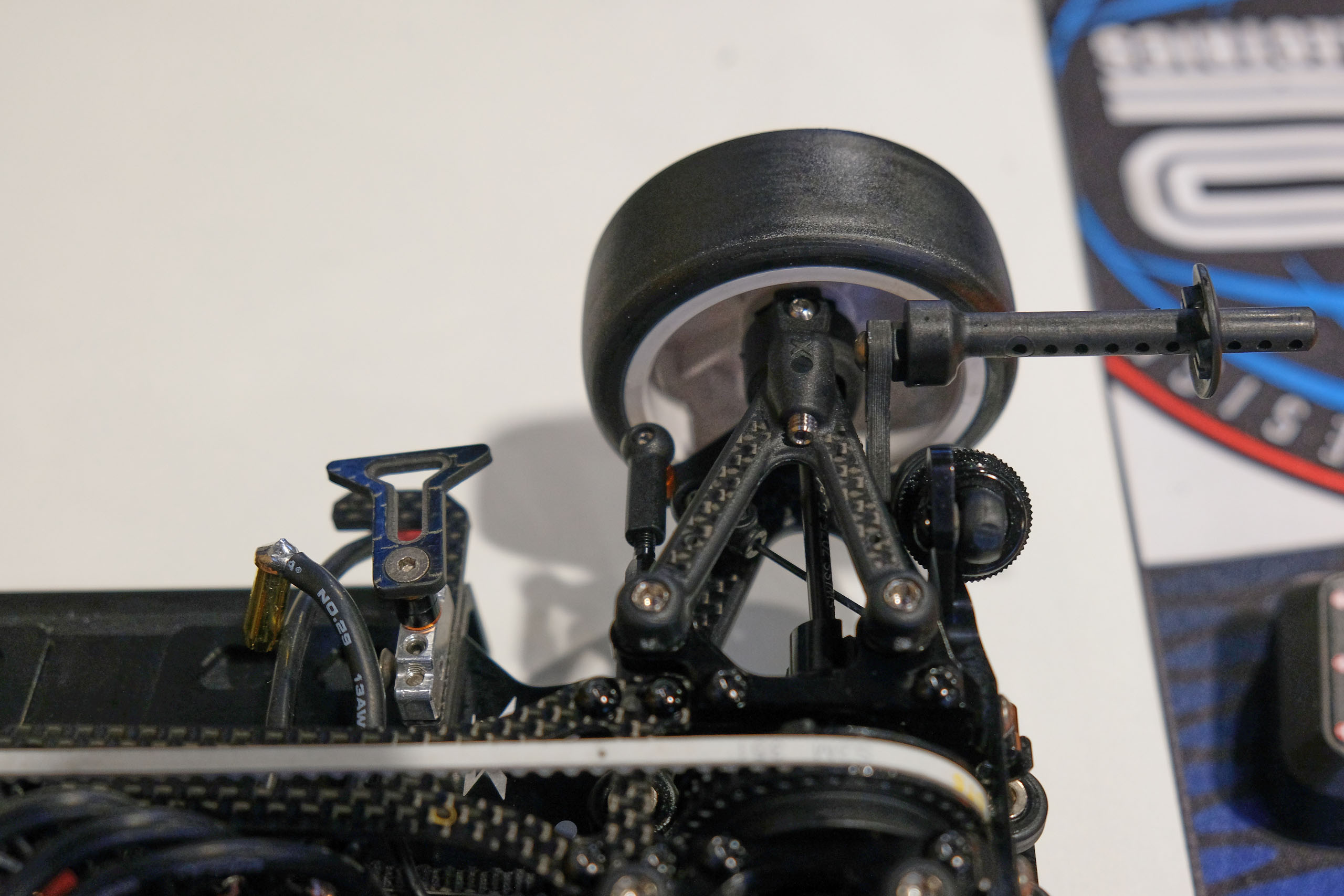
La Team XRay X4 de Nuno Huber.En photos ci-dessous, la Team XRay X4 de Nuno Huber, champion suisse de la catégorie Touring Car Stock en 2020. Hormis un combo traditionnel moteur et contrôleur brushless Hobbywing et l'utilisation de batteries IP Intellect, on remarquera le montage d'un servo de direction BrunoRC BR1 spécifiquement dédié à la Team XRay X4. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
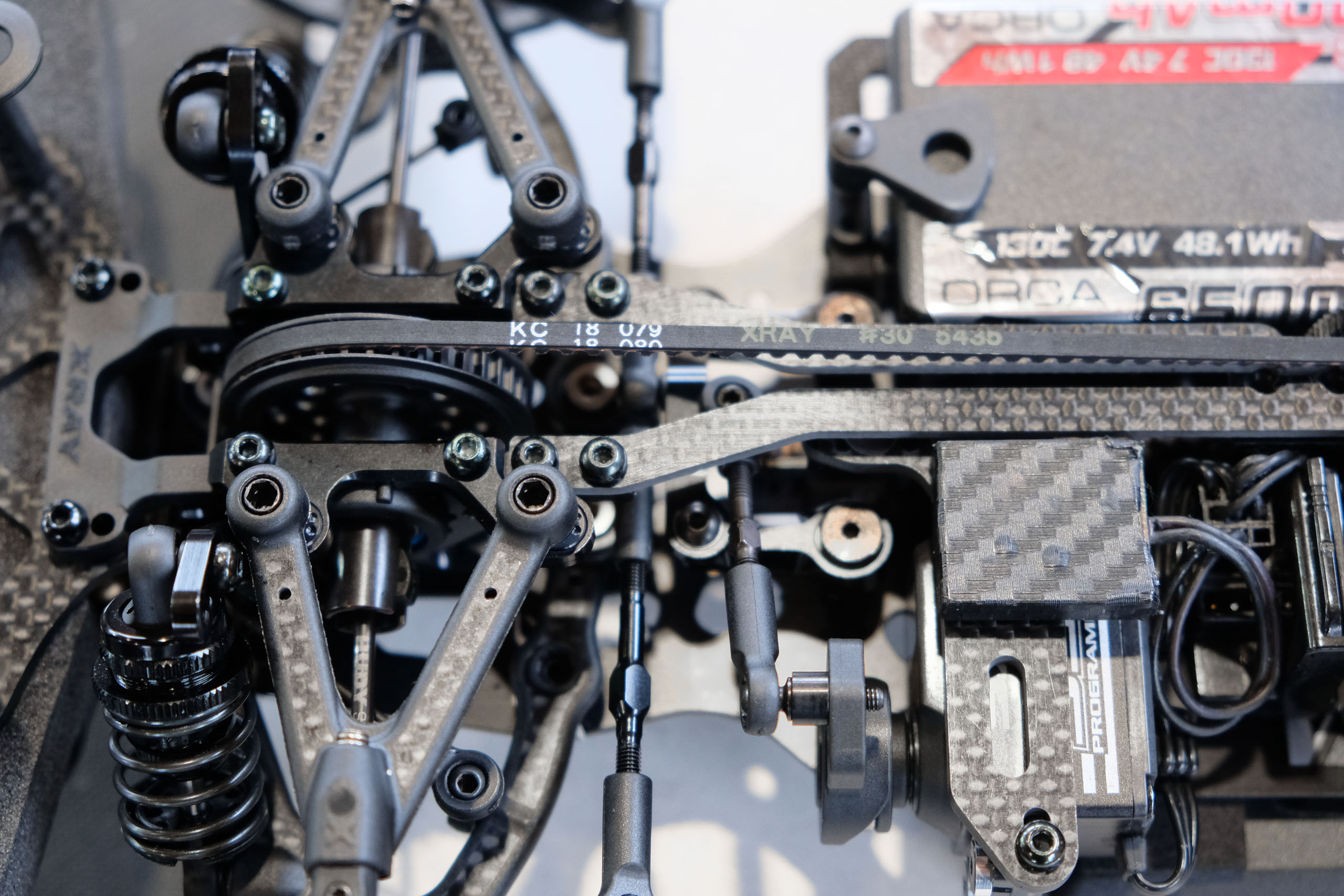
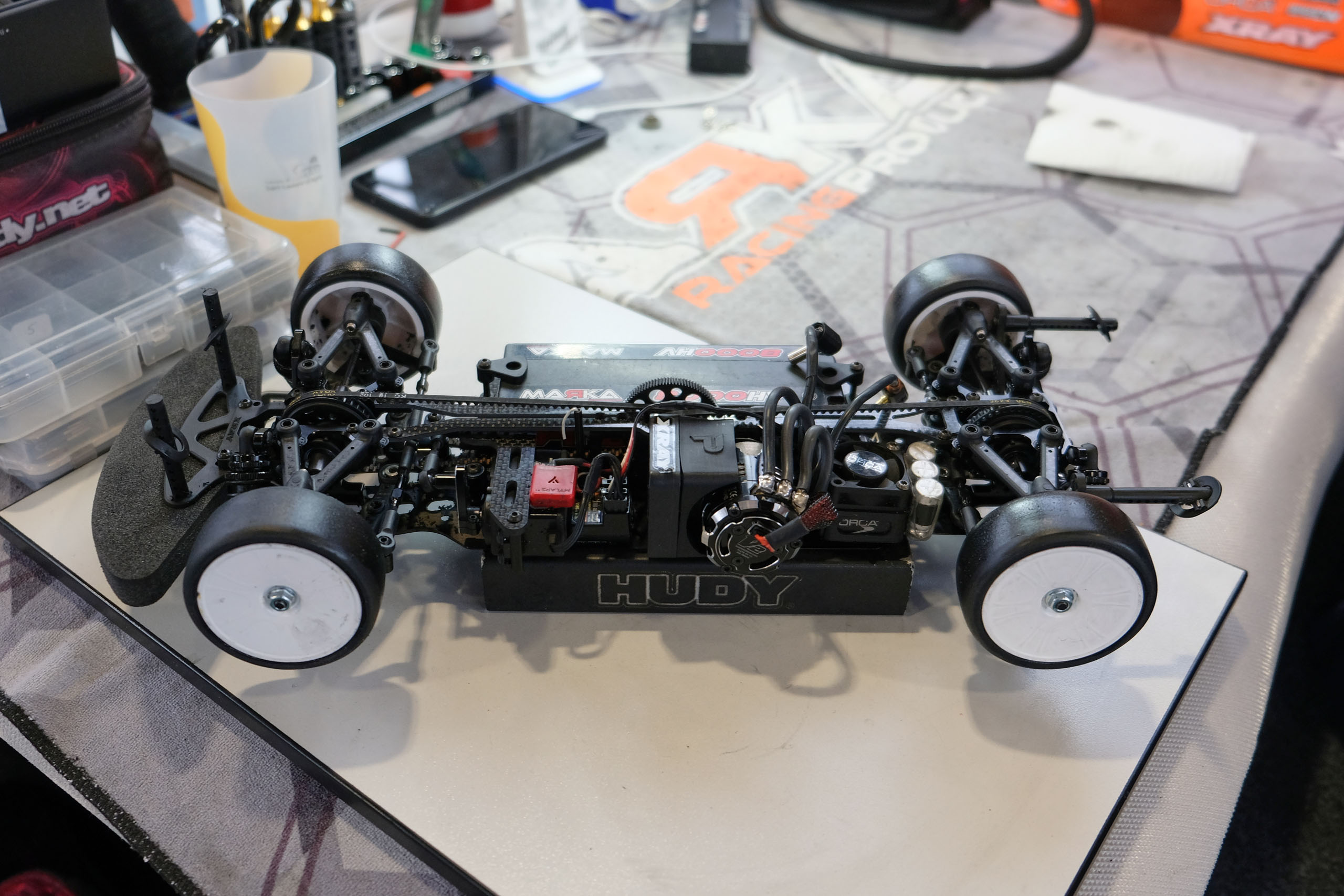
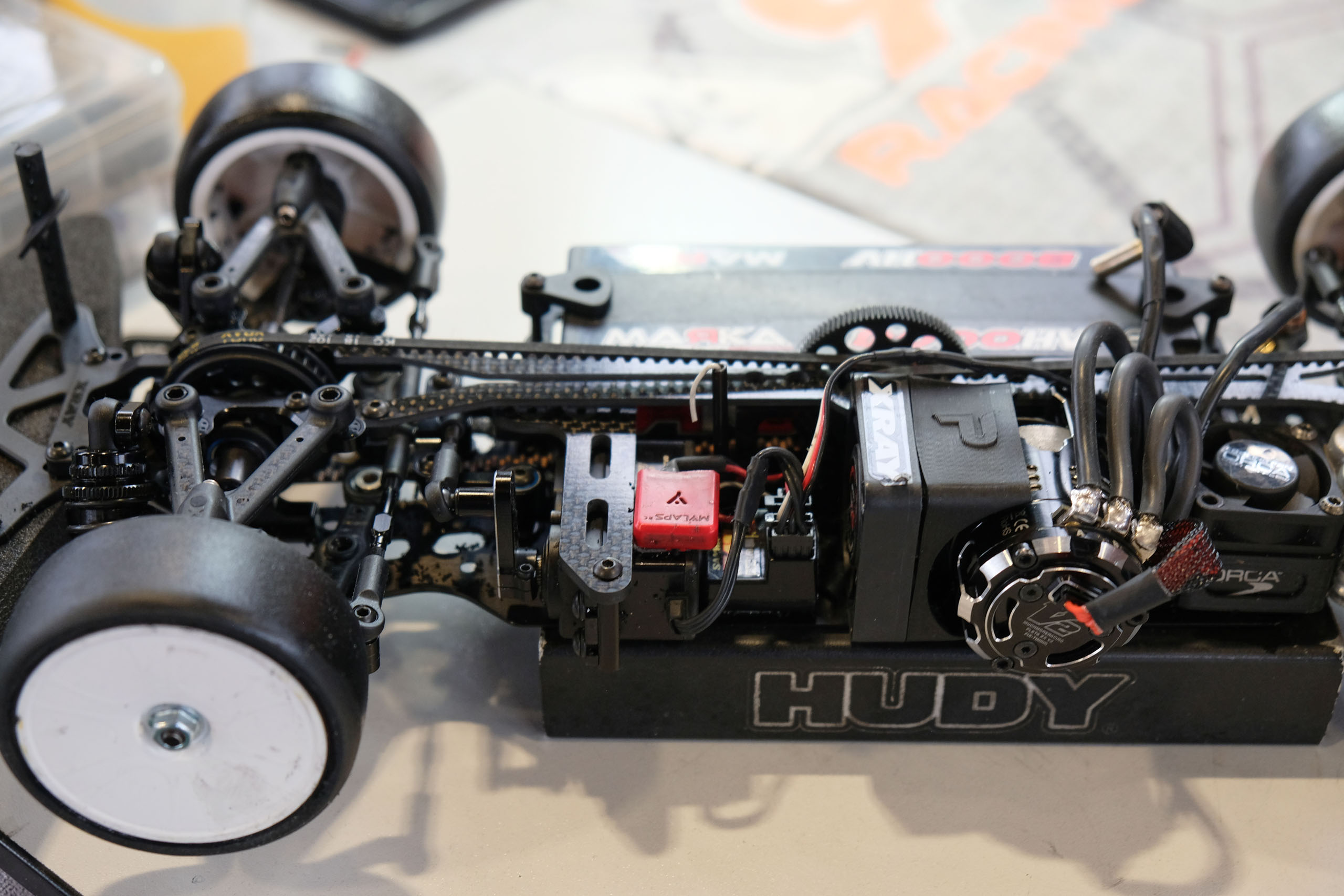
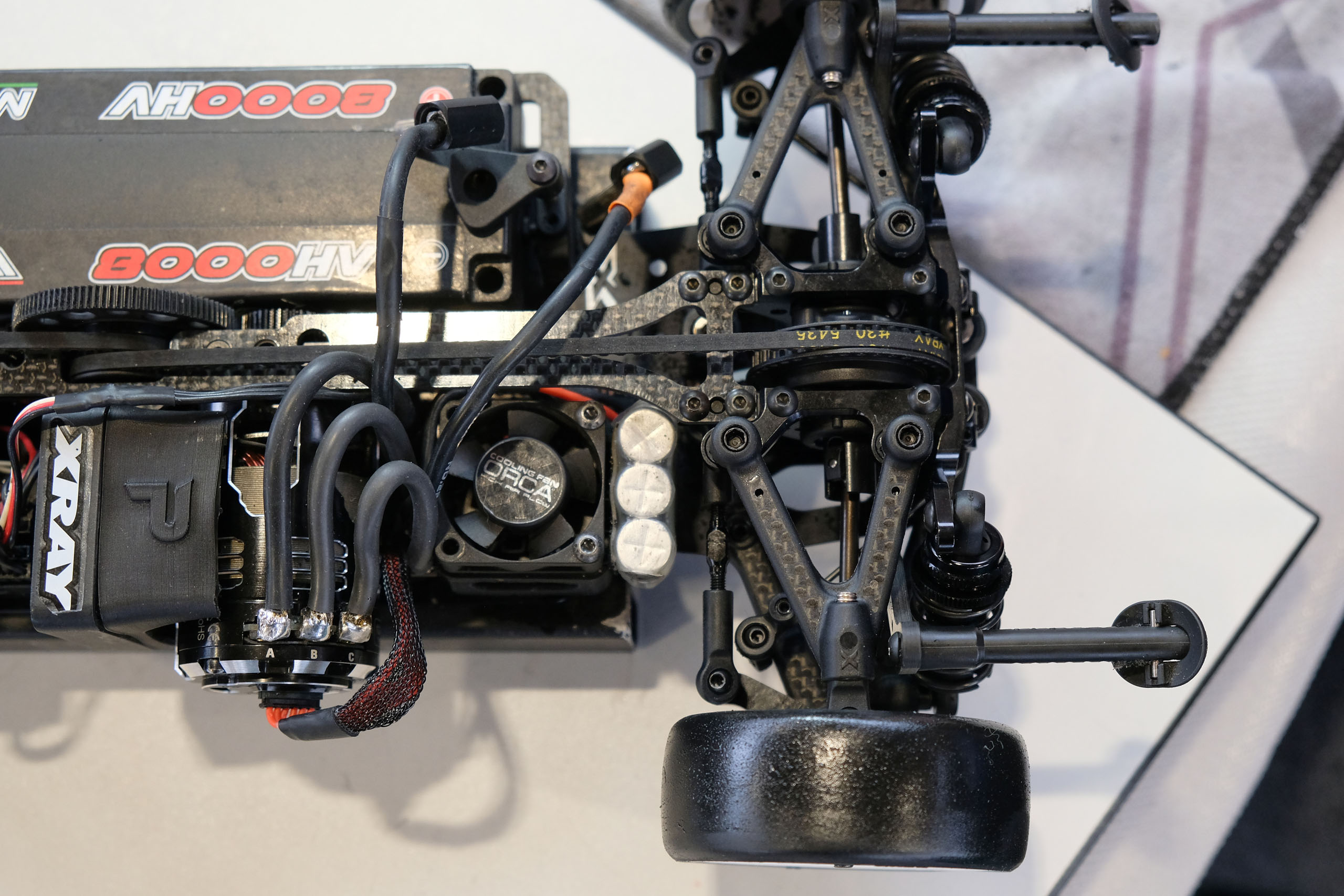
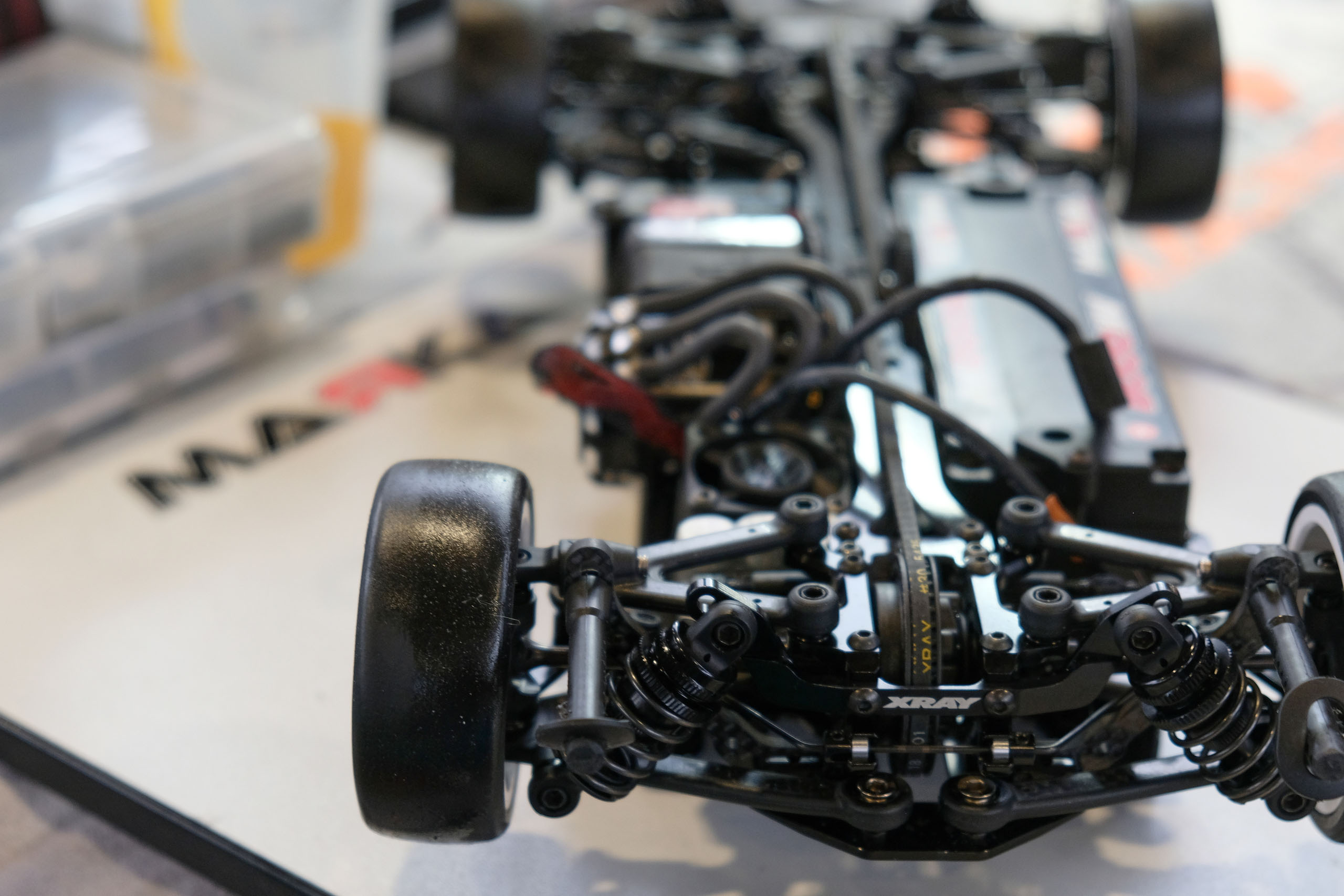
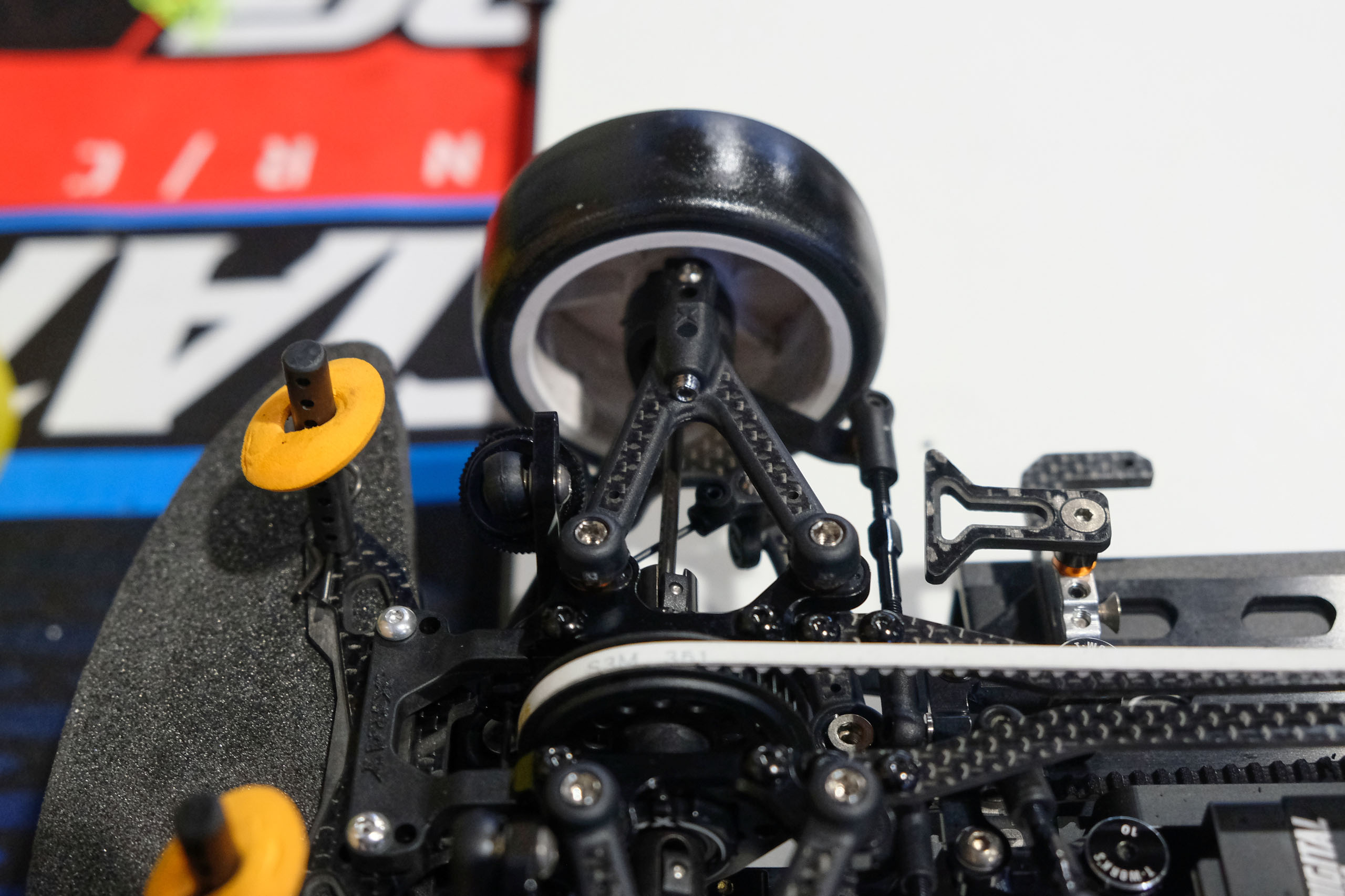
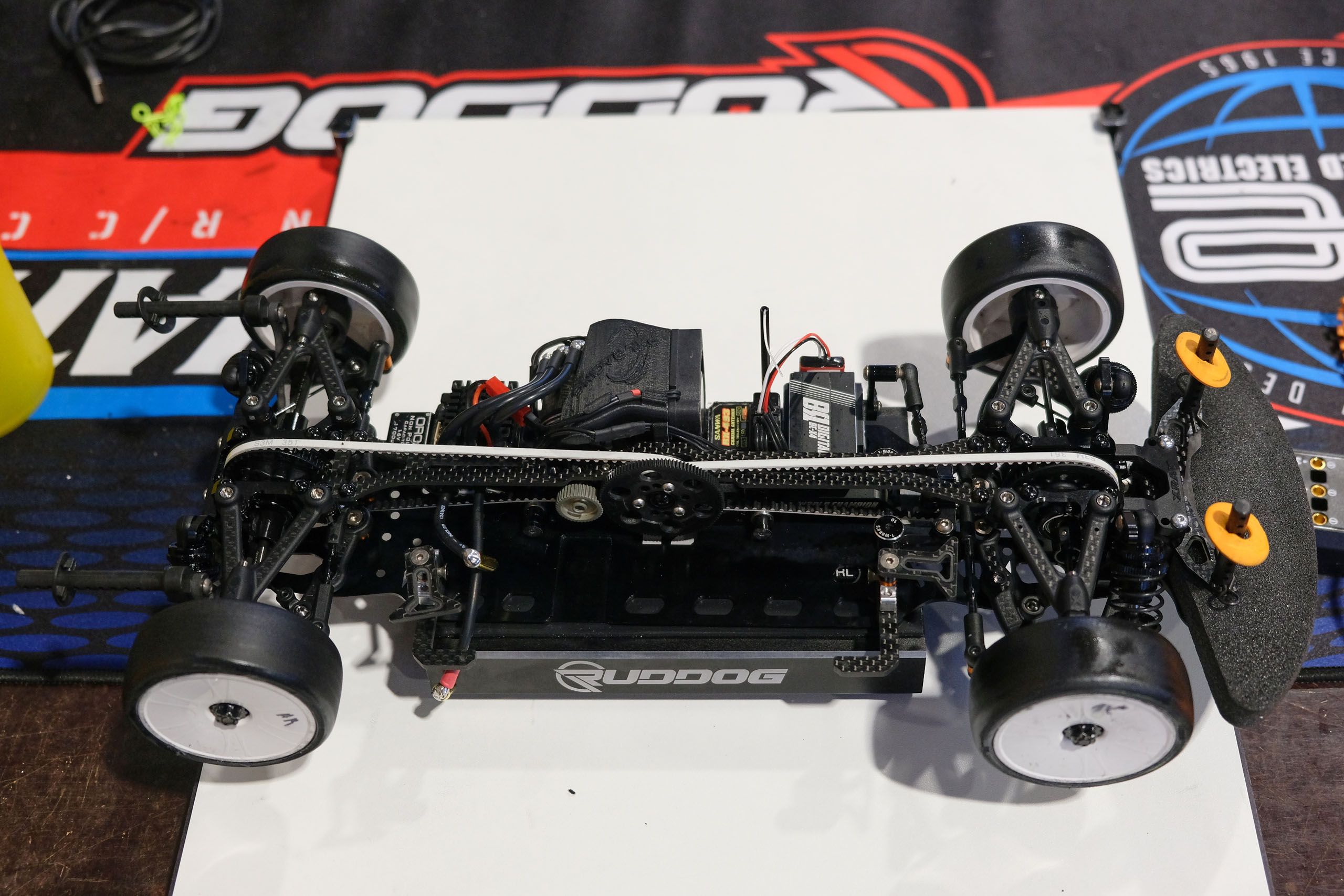
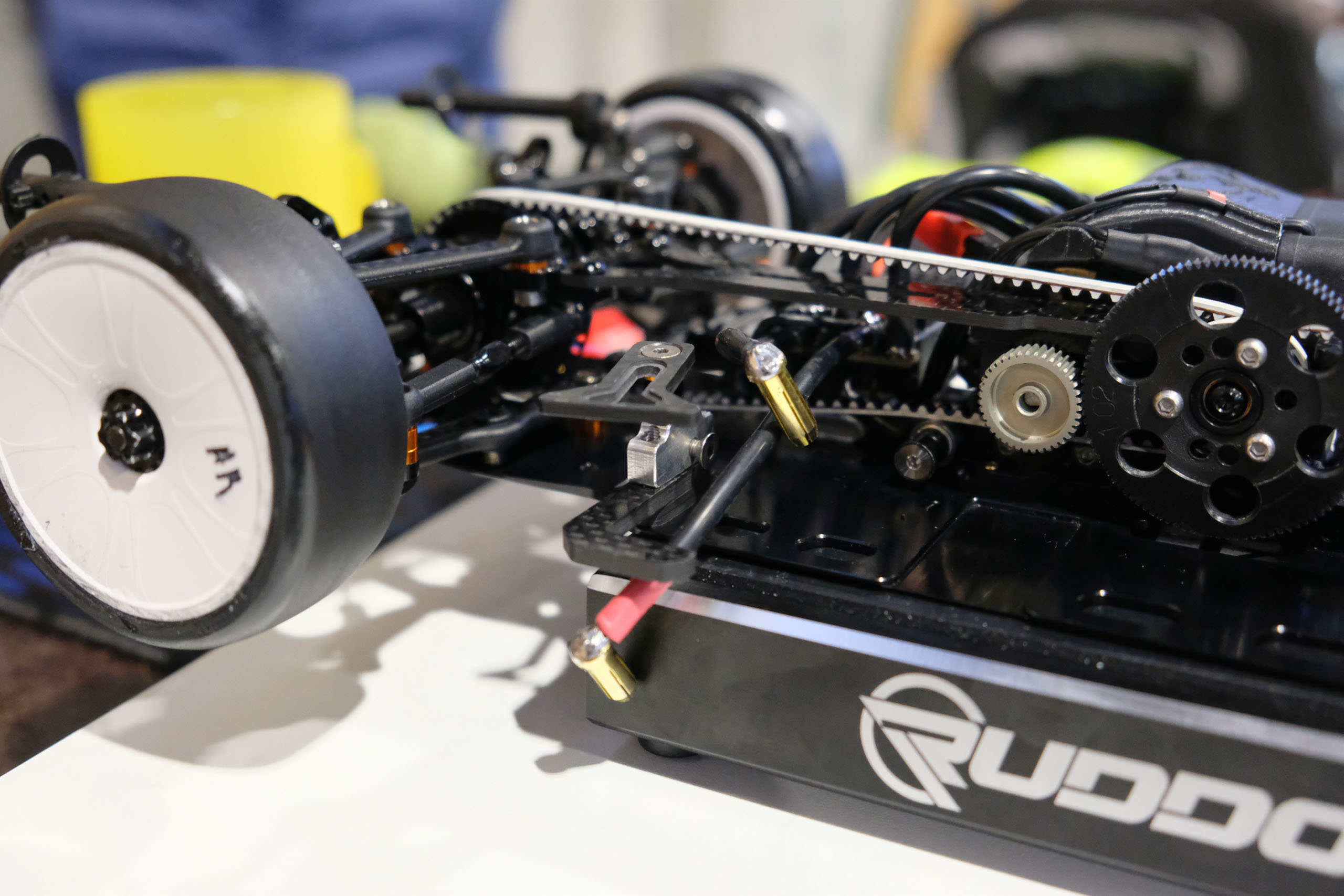
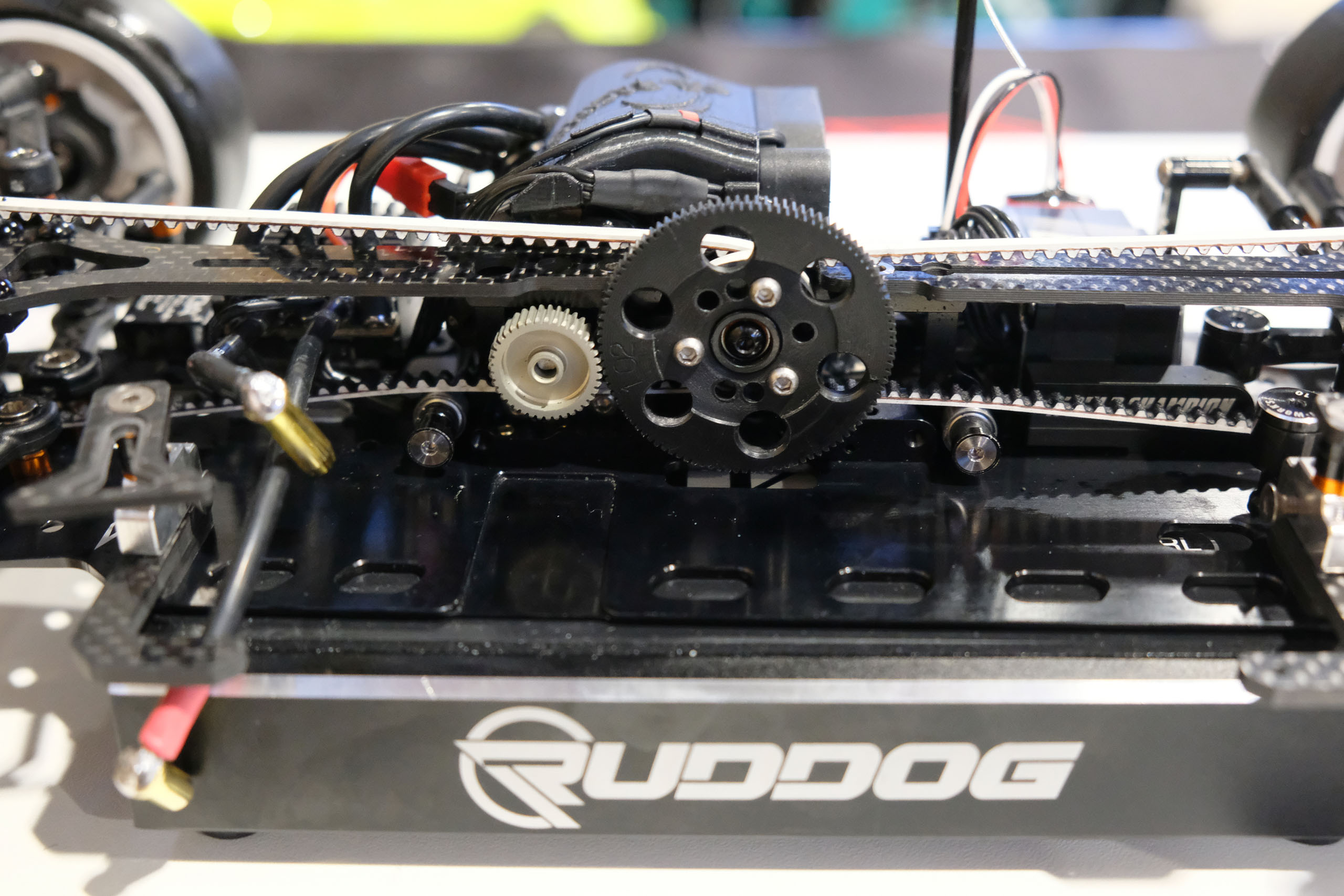
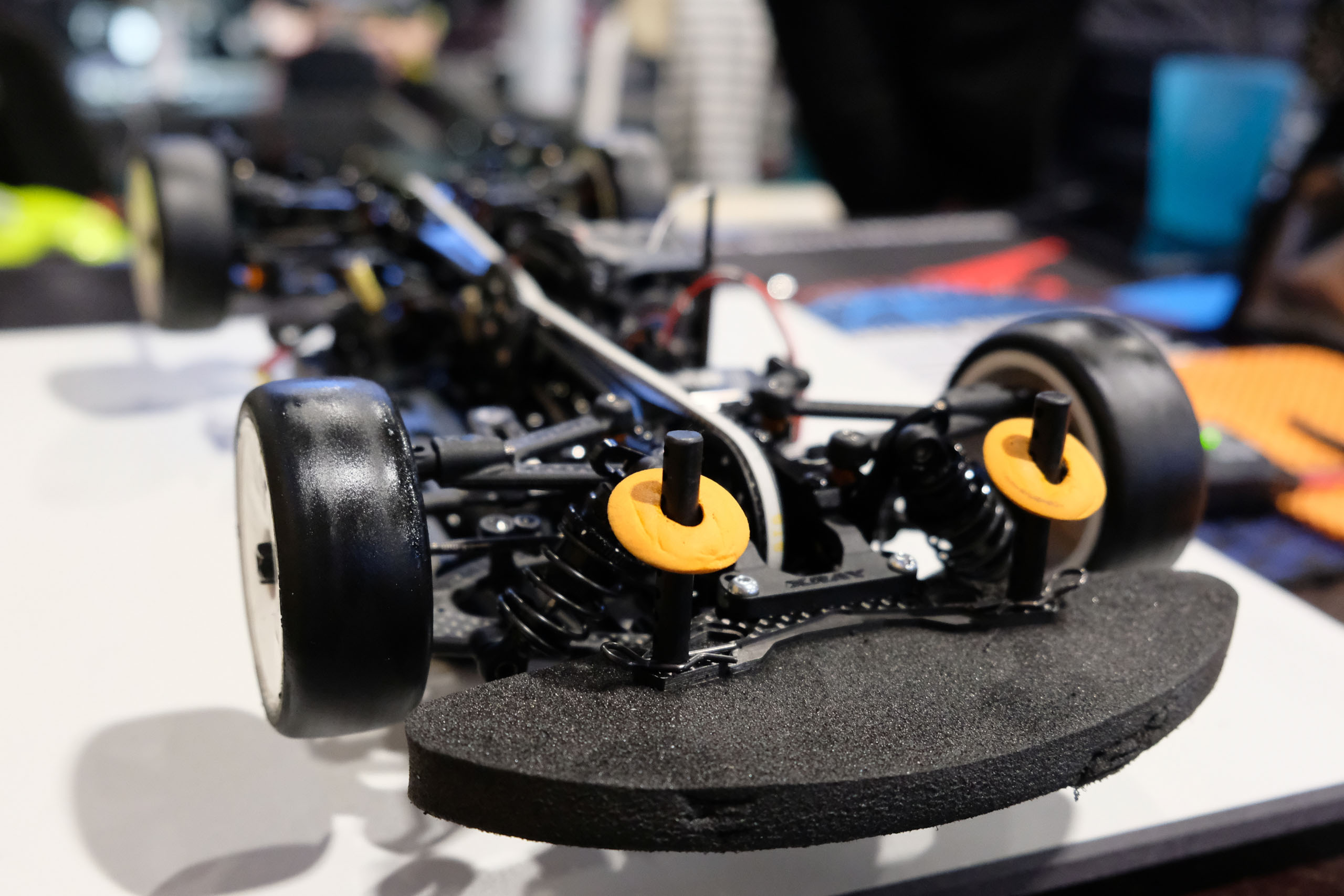
La Team XRay X4 de Philéas Bourquard.Sur l'auto de Philéas Bourquard, on pouvait plus particulièrement noter le montage d'un canal de ventilation imprimé 3D (ou issu de la fabrication additive si on souhaite parler plus rigoureusement) d'origine Phil Racing (qui propose également des pièces en carbone pour la Team Xray X4, telles que des platines supérieures, des bras de direction, etc.), associé à un ventilateur de 40x40mm pour bien refroidir le moteur, ainsi que l'adoption de courroies blanches "low friction" et le montage d'un servo de direction BrunoRC BR1 spécifiquement dédié à la Team XRay X4. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
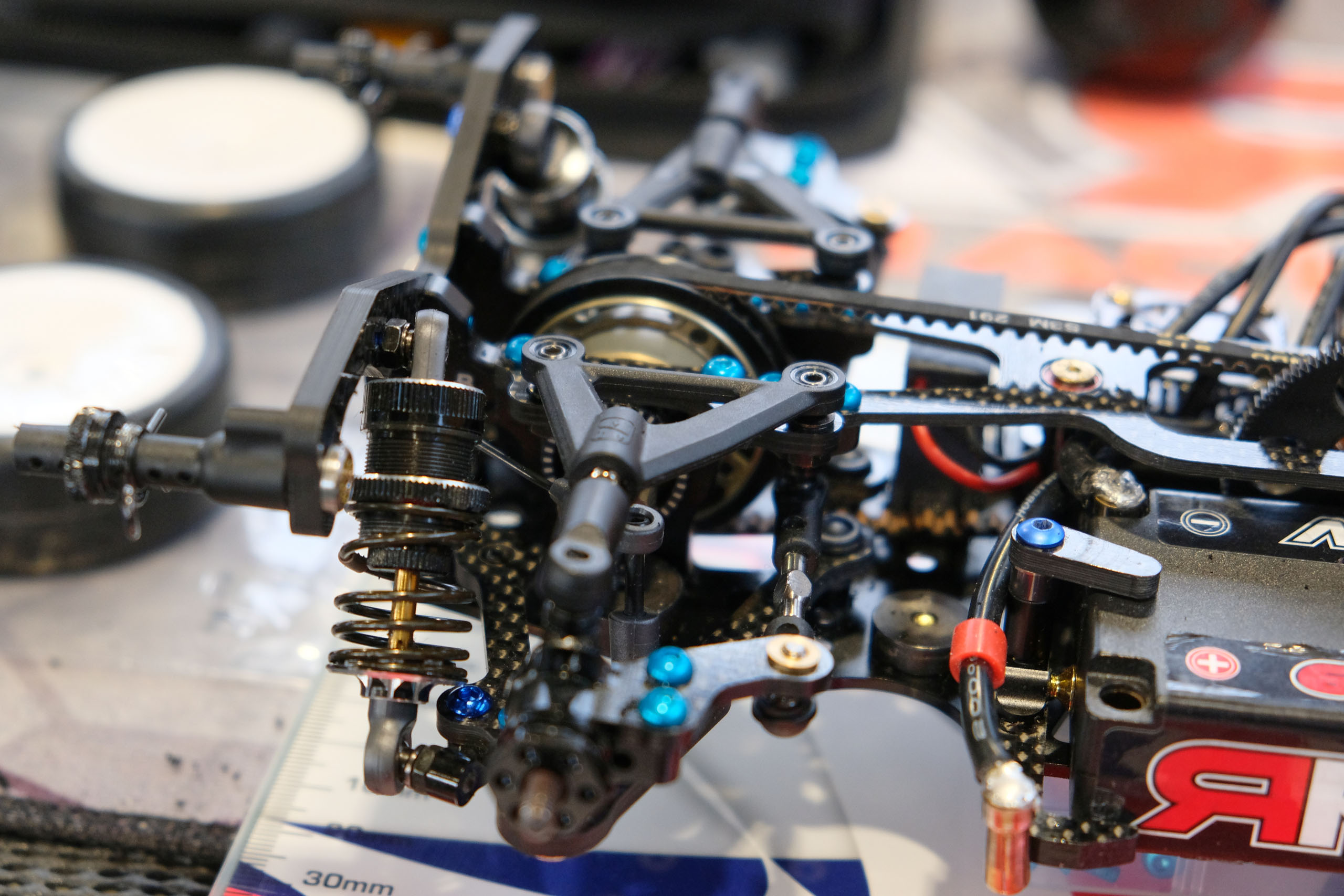
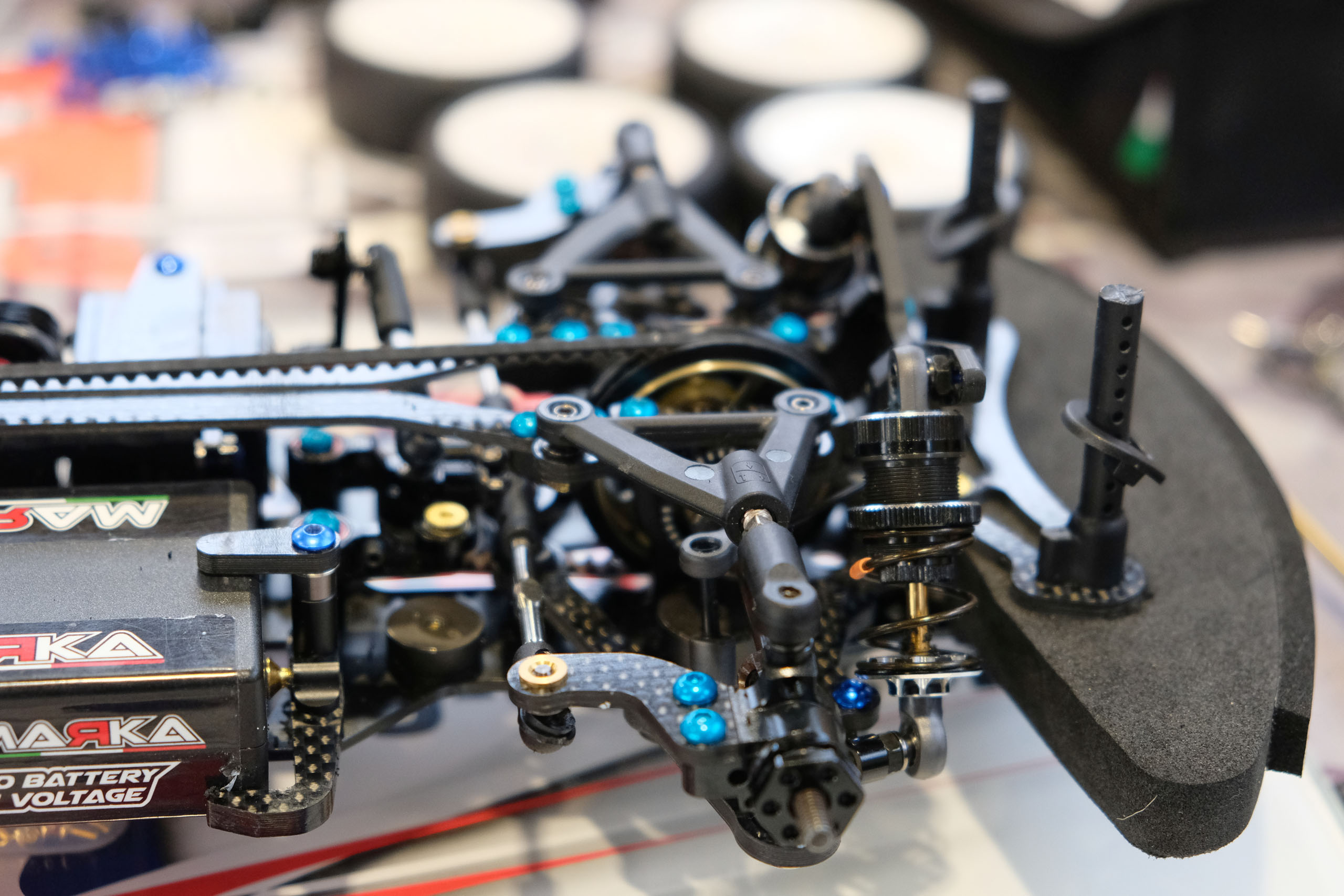
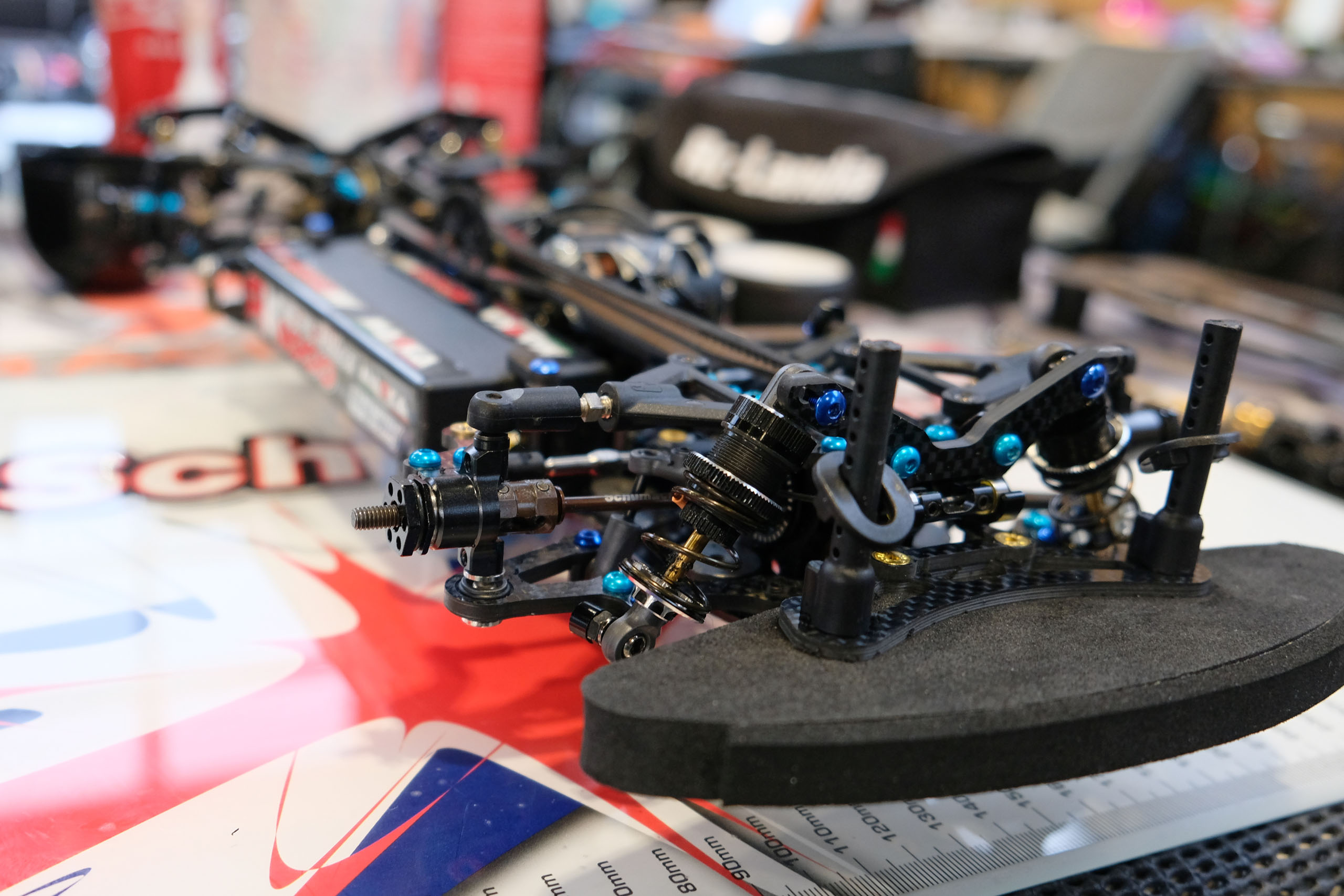
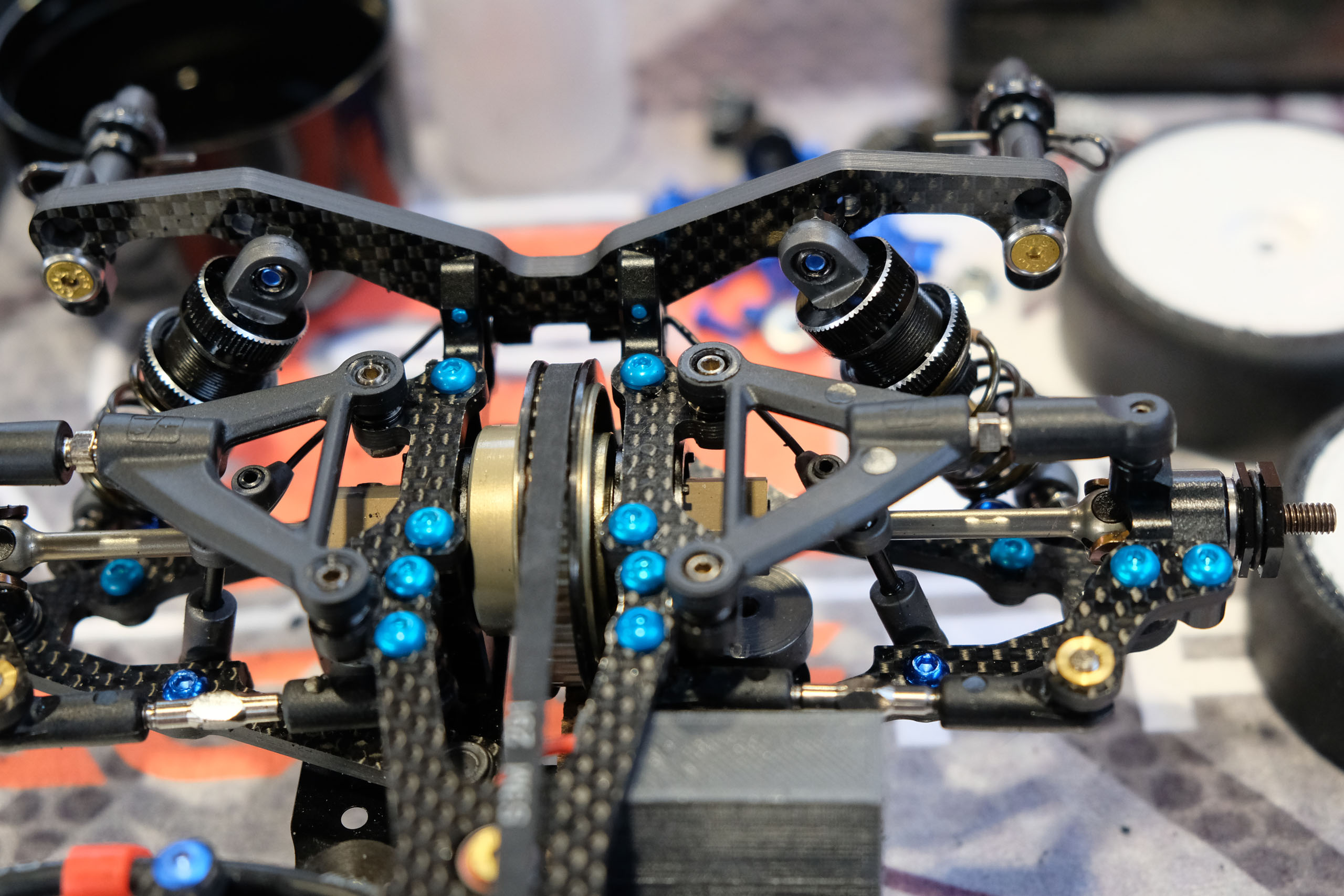
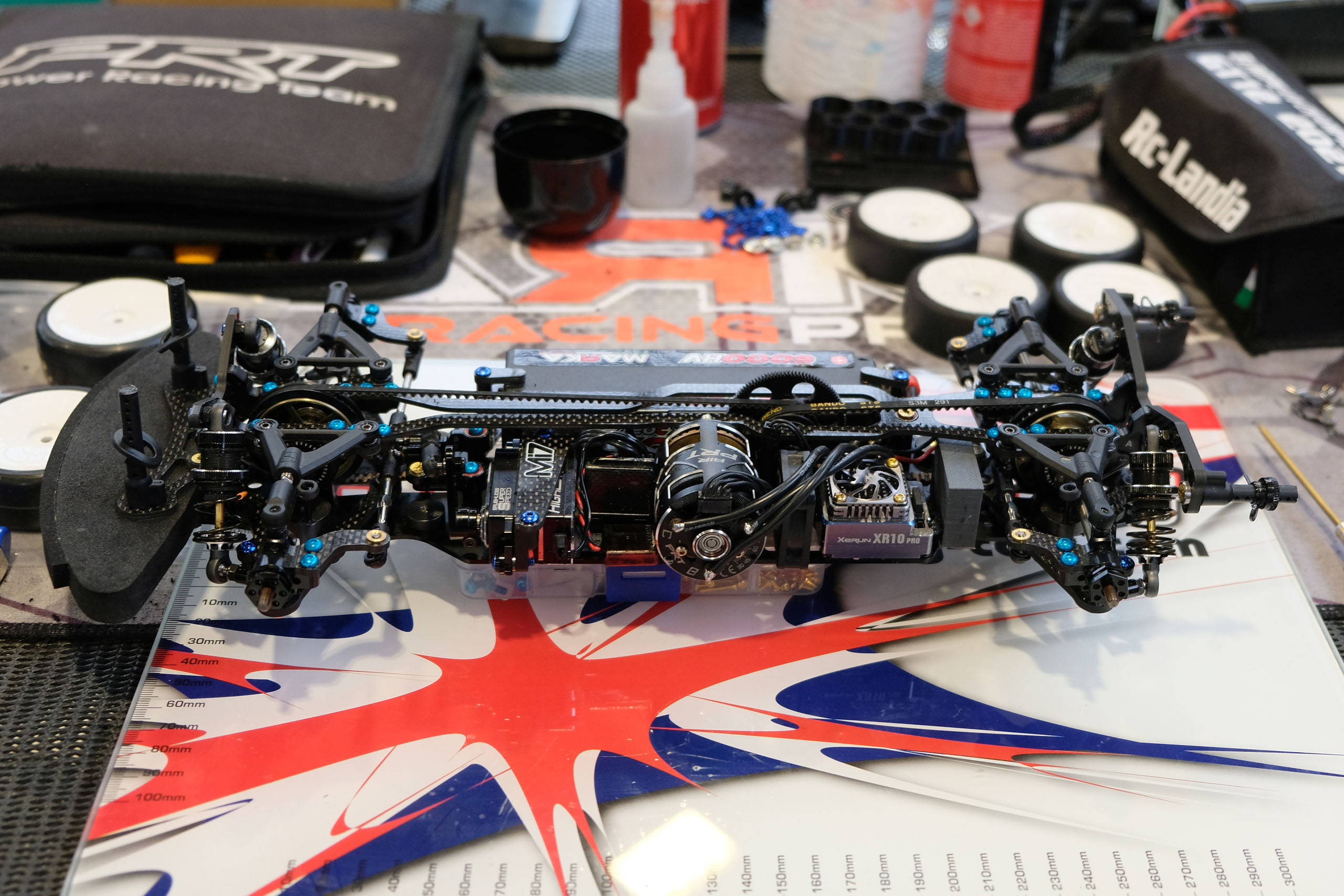
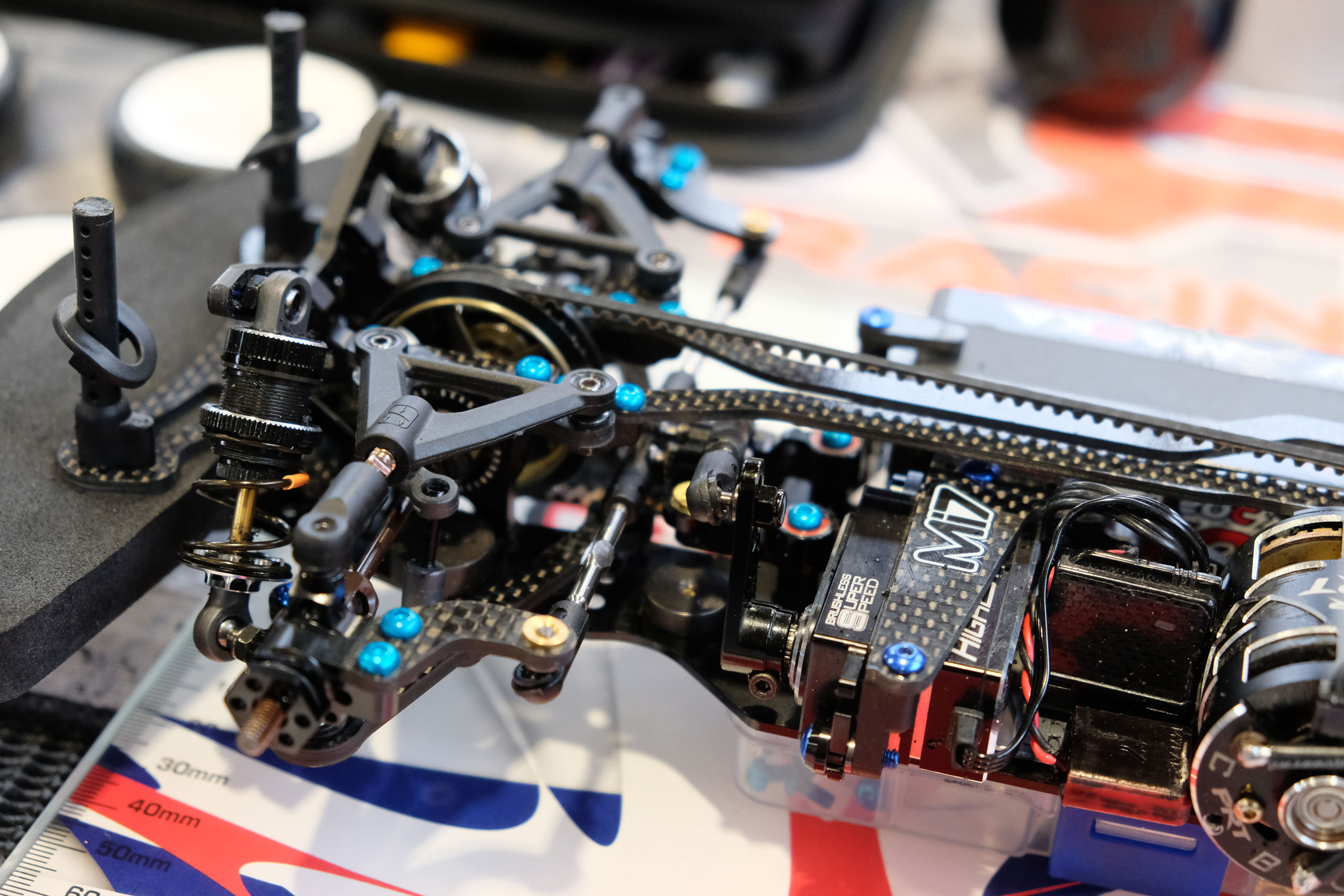
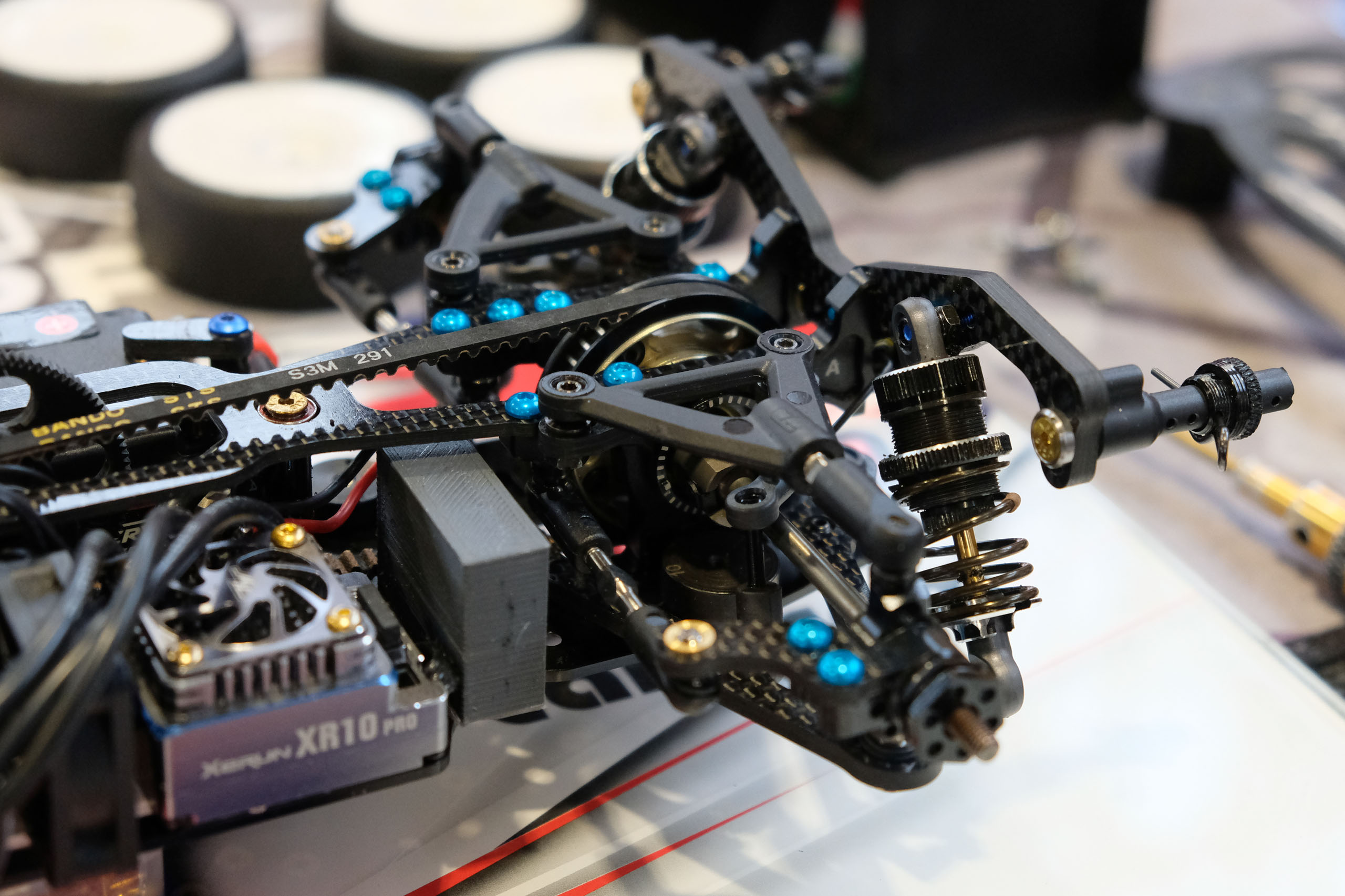
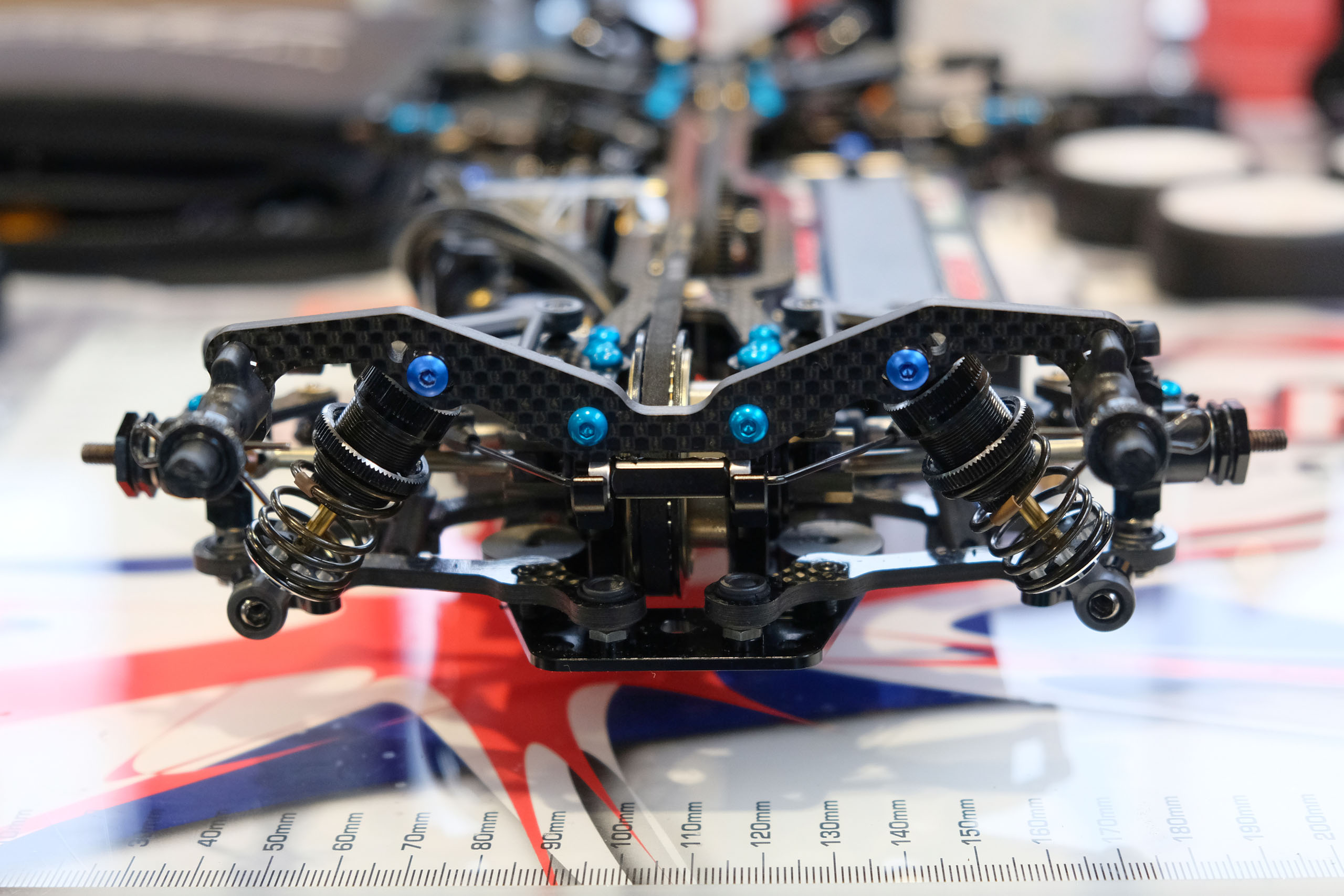
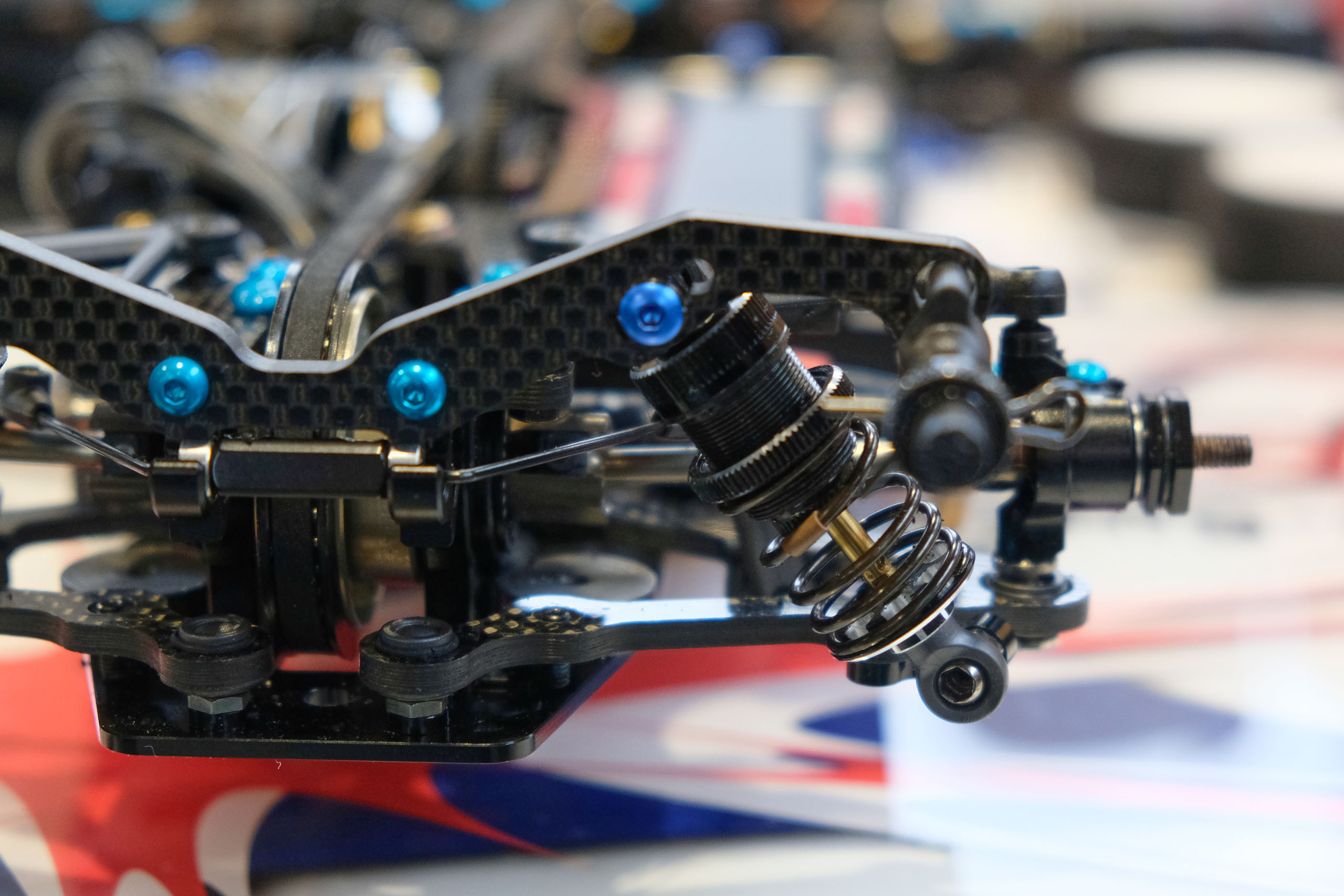
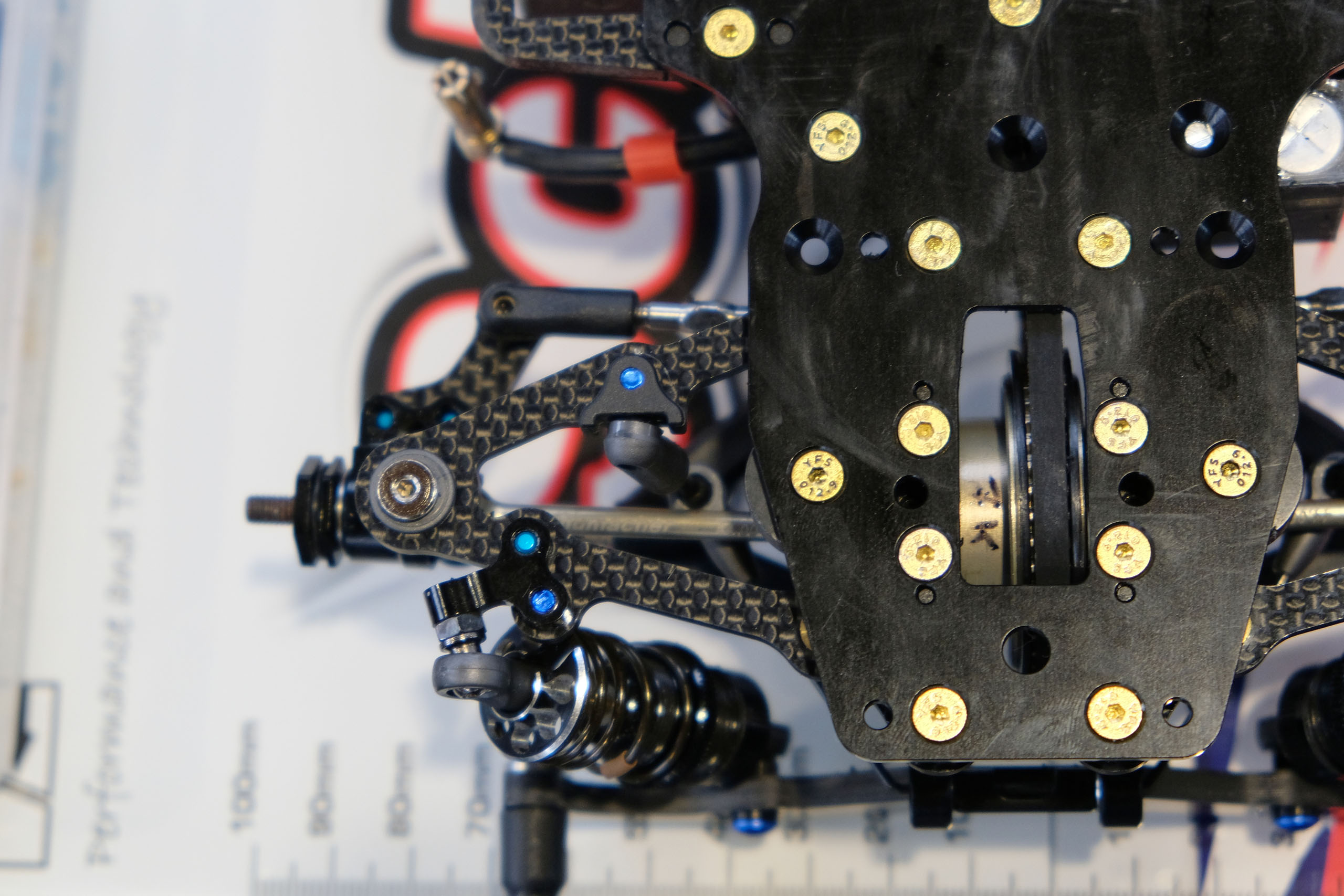
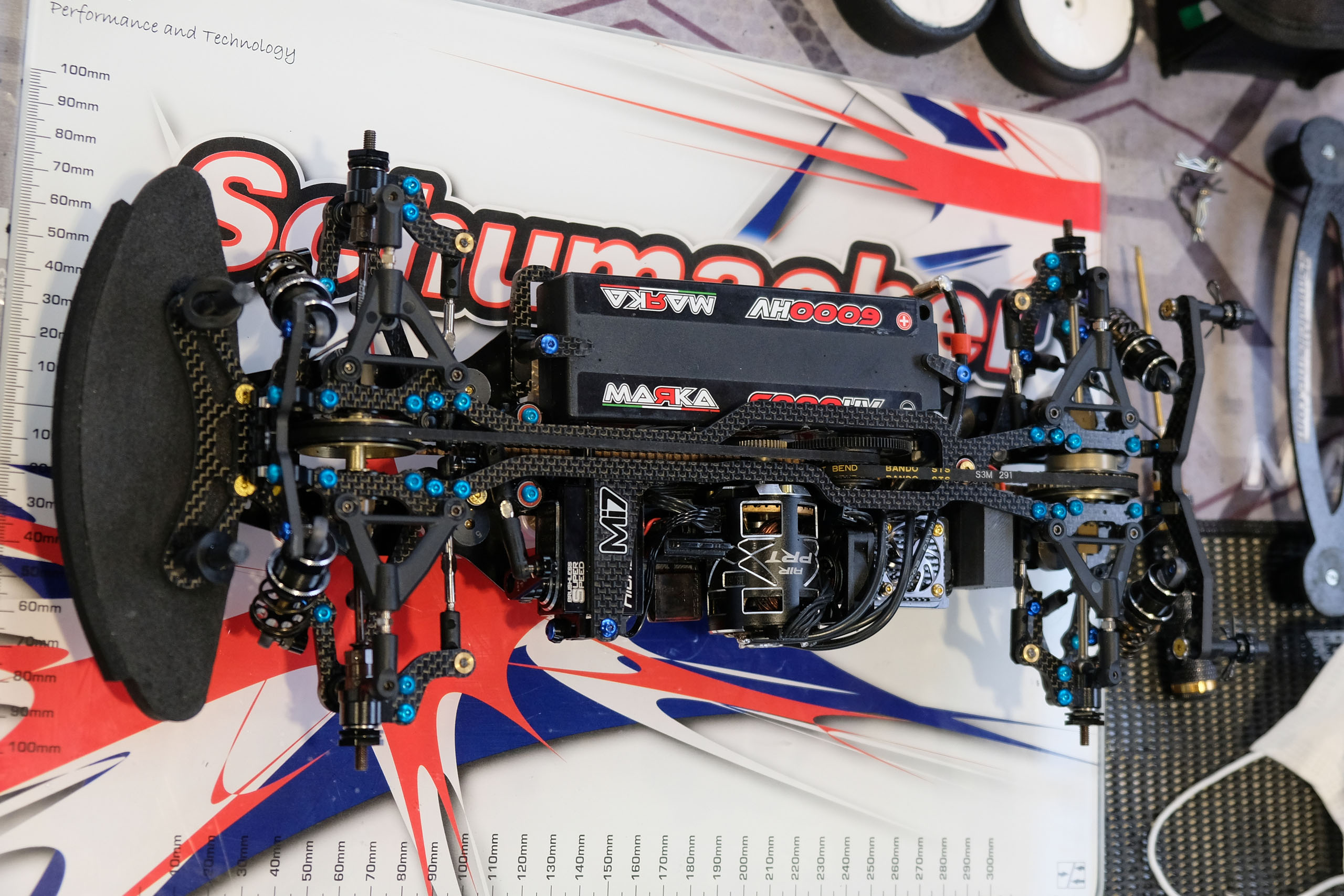
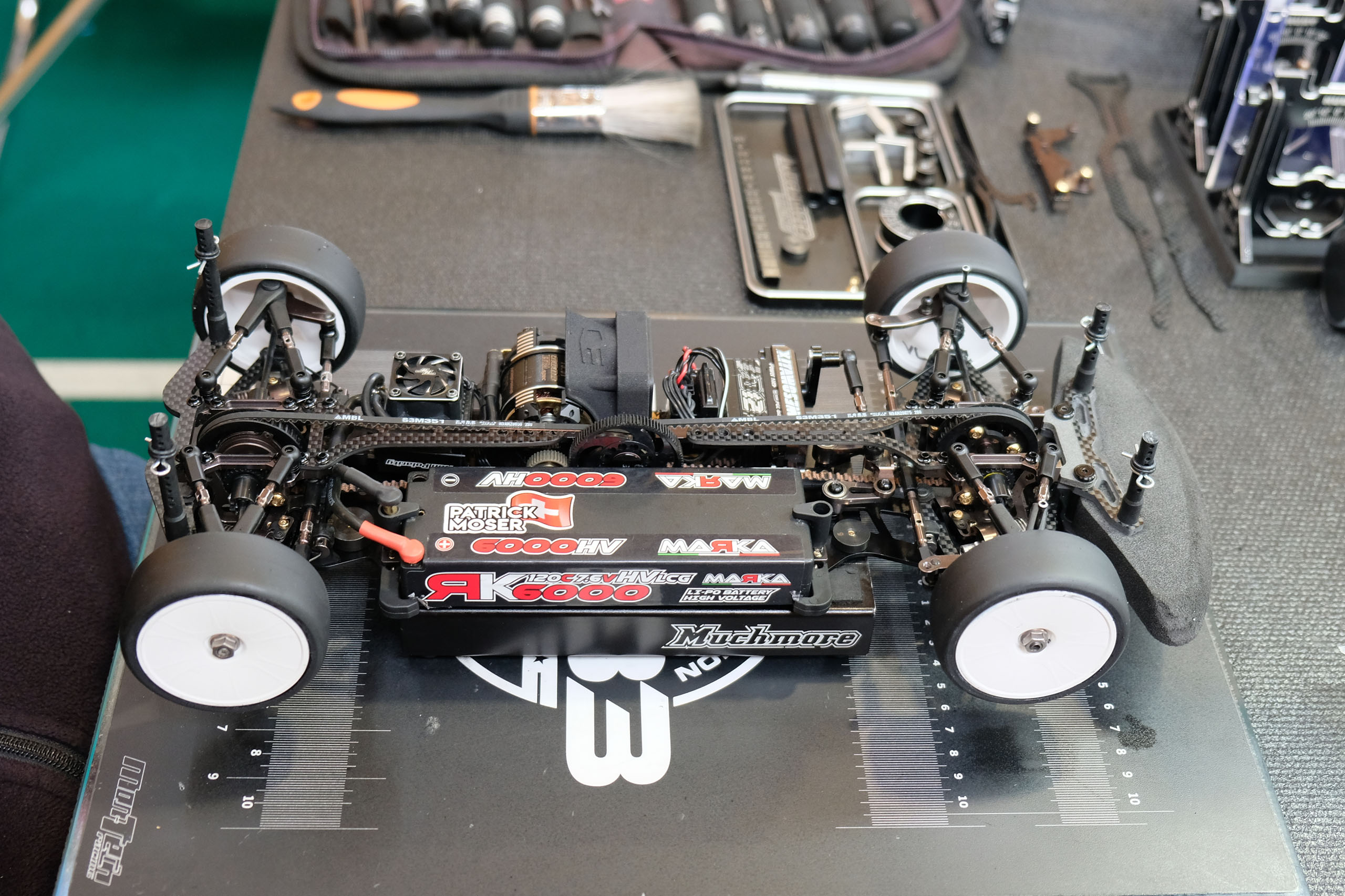
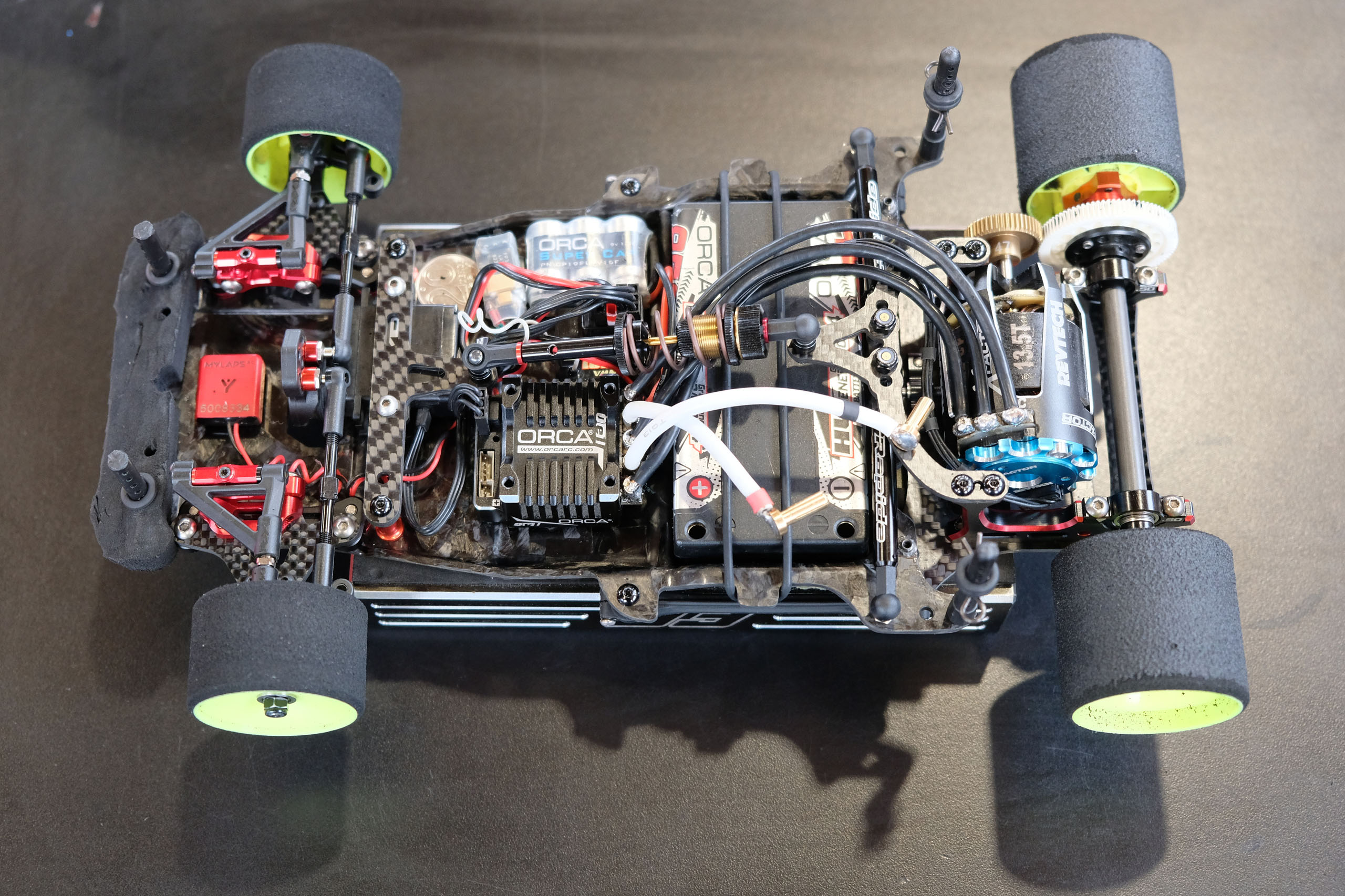
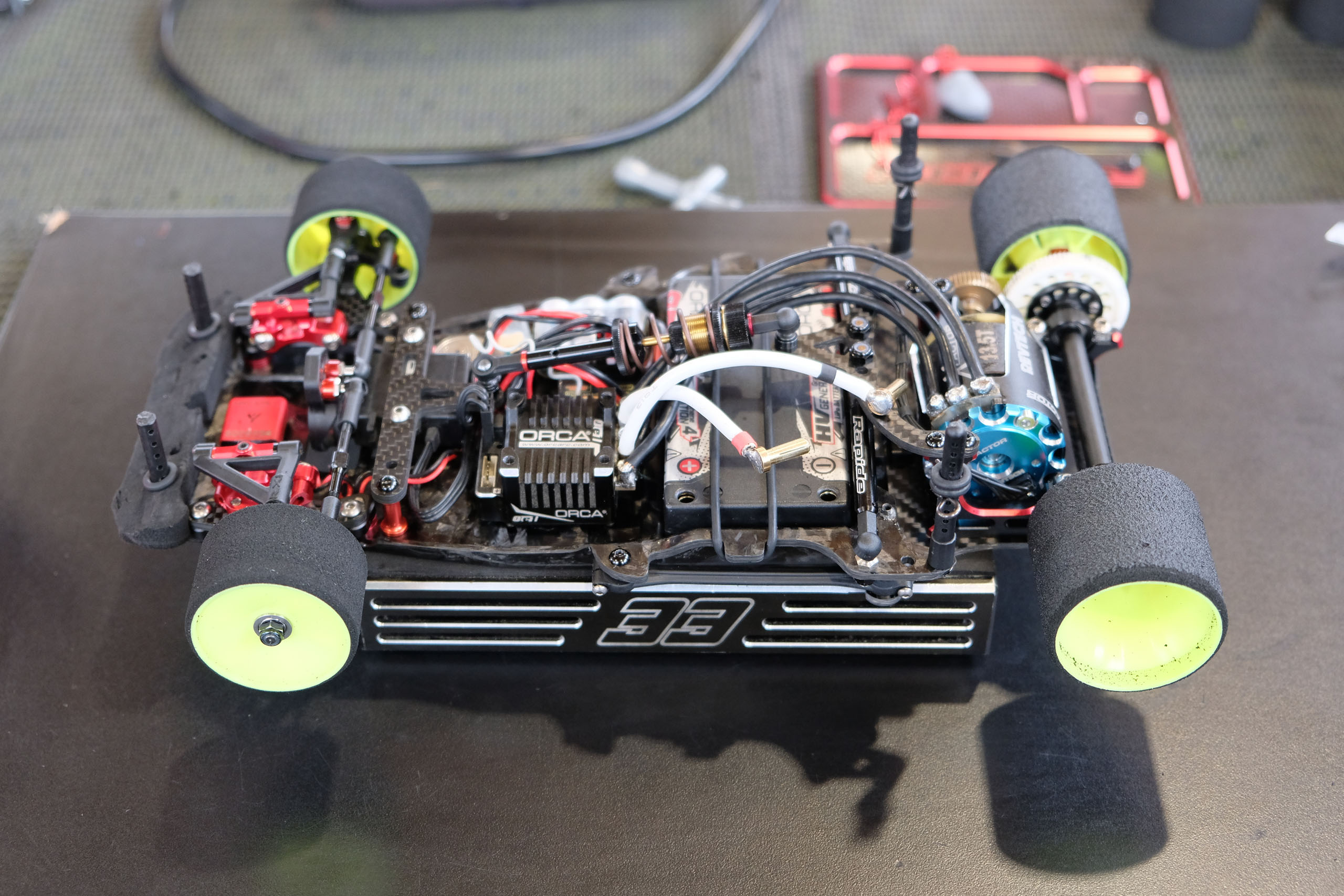
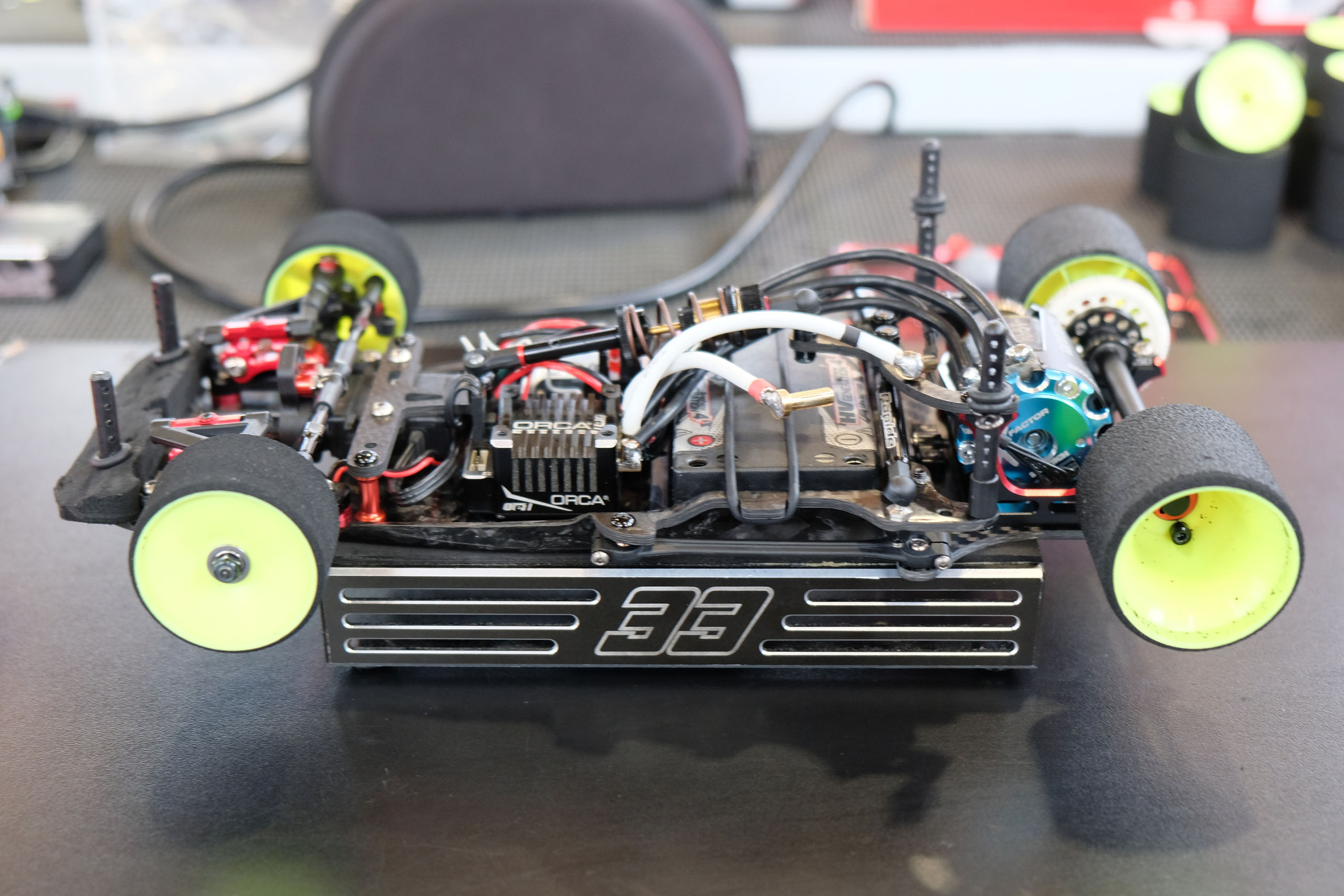
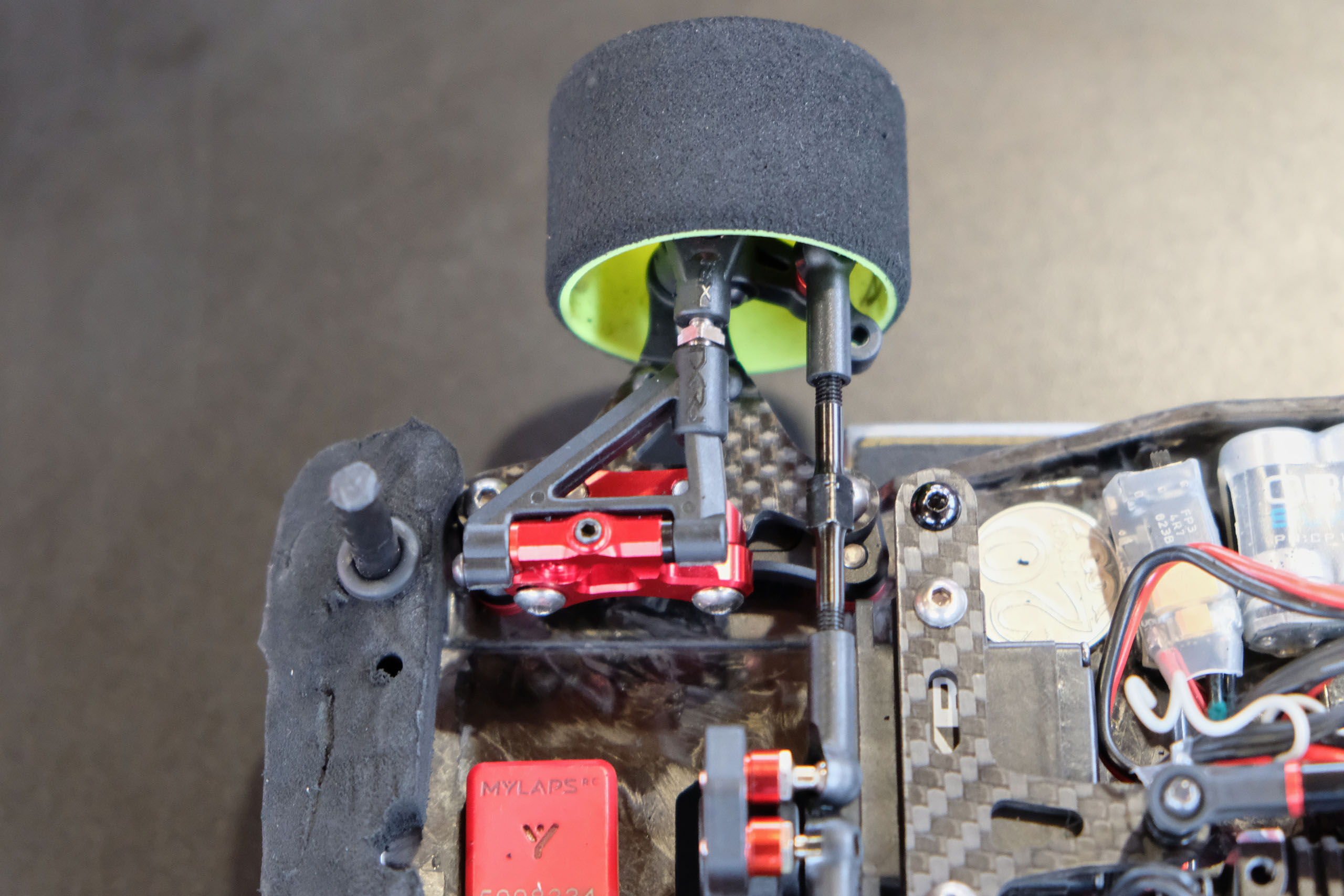
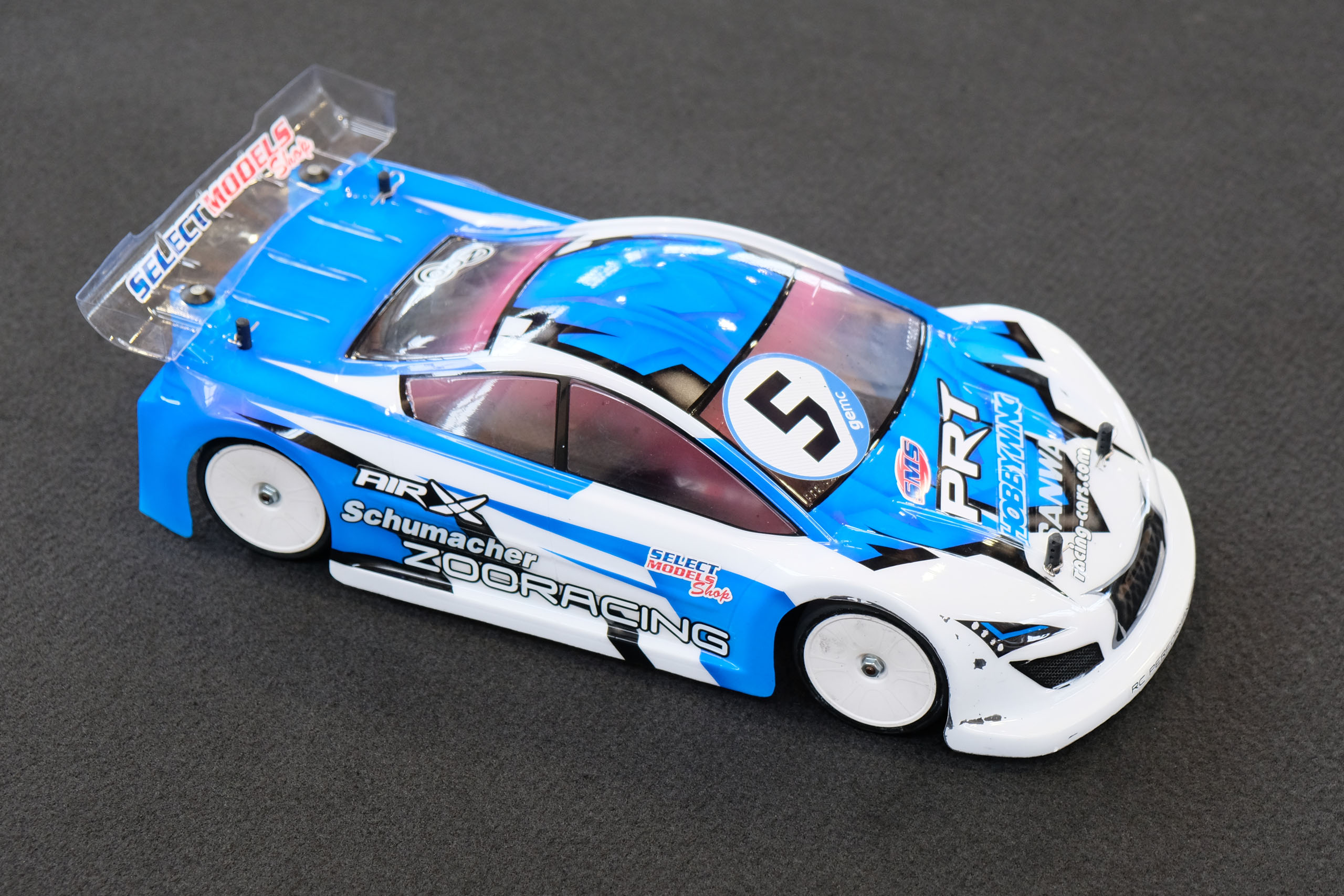
La Schumacher Mi7 de Julien Jost.Deux Schumacher Mi7 étaient visibles dans les stands et sur la piste, dont celle en photos ci-dessous appartenant à Julien Jost, pilote officiel de la marque de Northampton. Sa Mi7 est équipée d'un châssis en aluminium et de quelques options de la marque, ainsi de visserie anodisée bleu et or. La Mi7 n'est plus présente dans le catalogue online de Schumacher, car sa remplaçante devrait être prochainement disponible commercialement. Sur cette dernière, on ne sait pas grand chose pour le moment. On peut supposer que cette probable Mi8 devrait avoir une transmission remaniée, avec une poulie centrale et deux courroies d'égale longueur, forcément une nouvelle platine supérieure, des amortisseurs plus compacts associés à des supports d'amortisseurs plus bas. On devrait en savoir plus très bientôt! Côté motorisation, Julien Jost reste fidèle au fabricant français PRT Electronic, puisqu'il utilisait un Air X 13.5T, un moteur qui propose bon nombre de solutions techniques intéressantes. Le moteur est plus compact que la moyenne, et la cage semble bien ventilé, sans faire de compromis hasardeux sur sa rigidité. Les deux roulements à billes, de dimensions respectables, sont accessibles facilement et biens guidés. De petits joints toriques sur l'arbre du rotor assurent un chemin de billes obliques aux roulements. Les fils du stator sont soudés directement aux borniers, qui se trouvent sur sur le flanc extérieur et non au niveau du diamètre extérieur. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
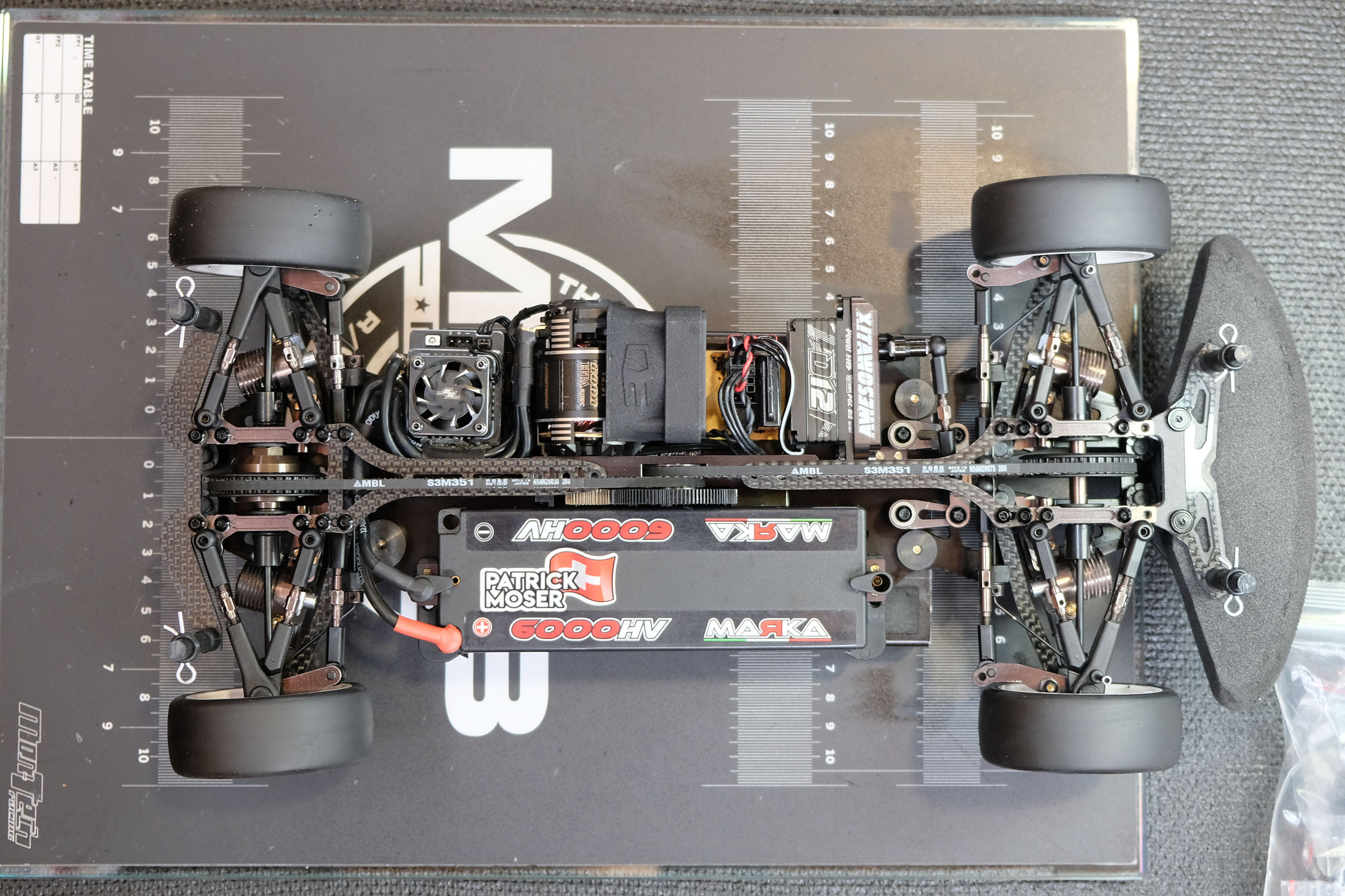
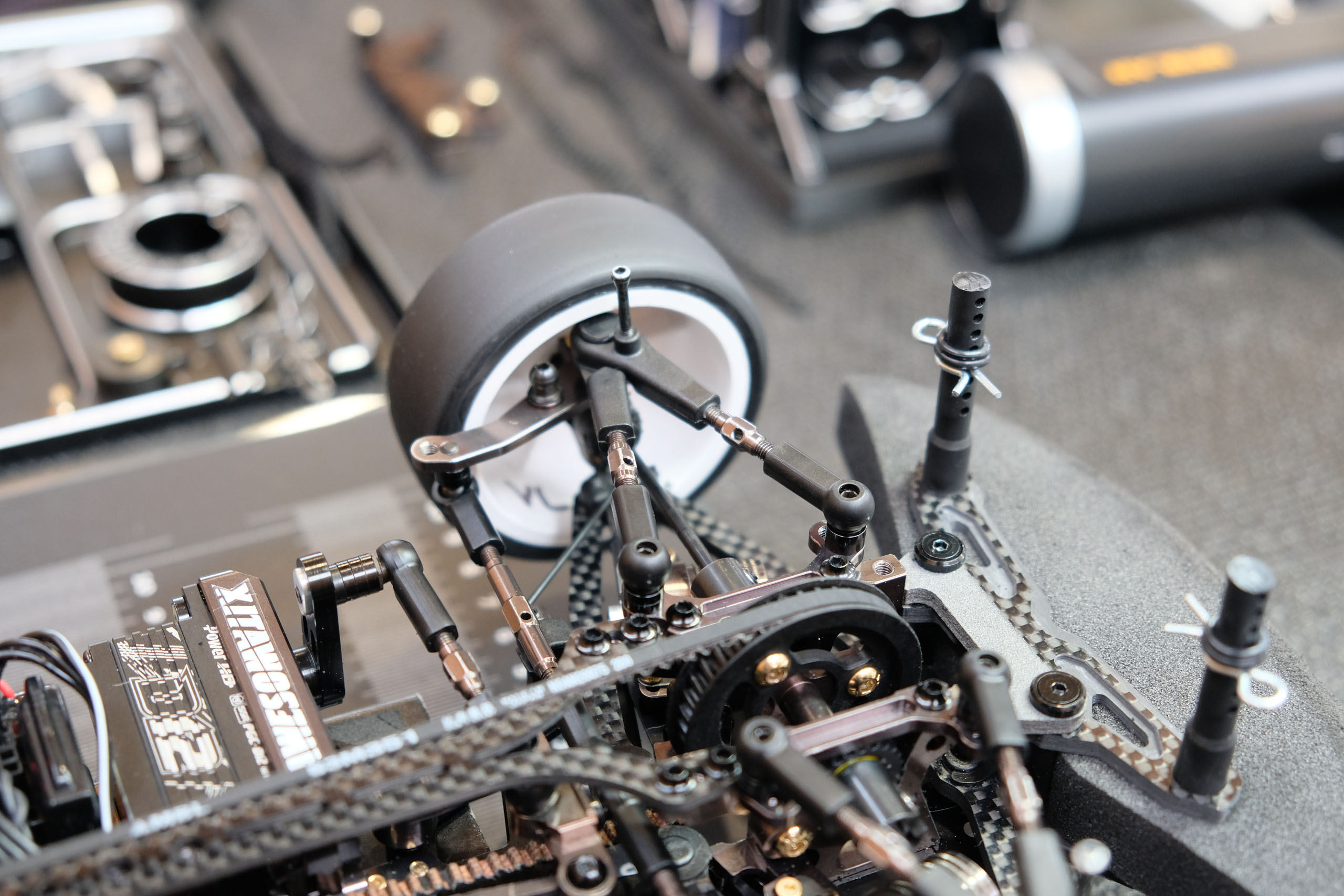
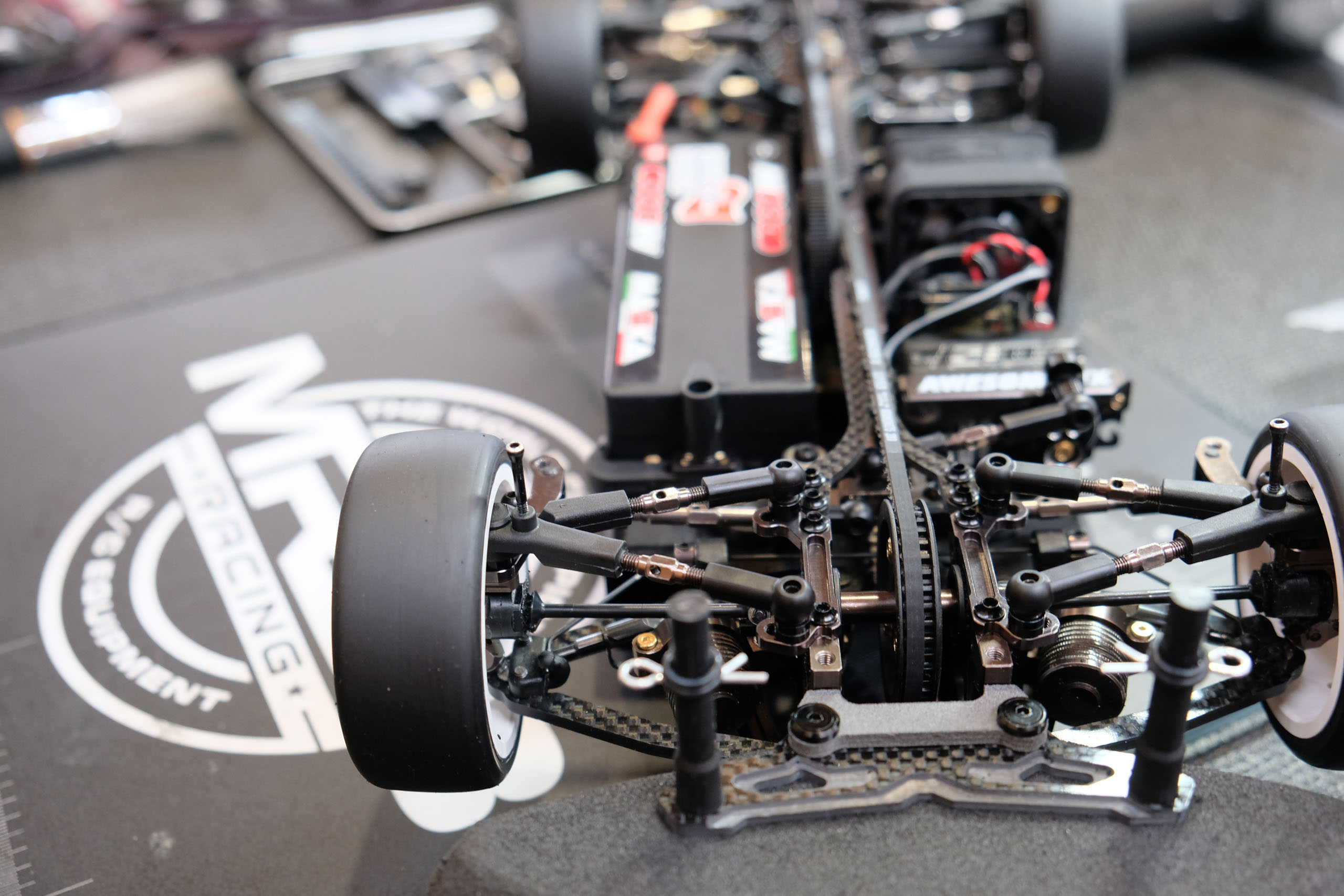
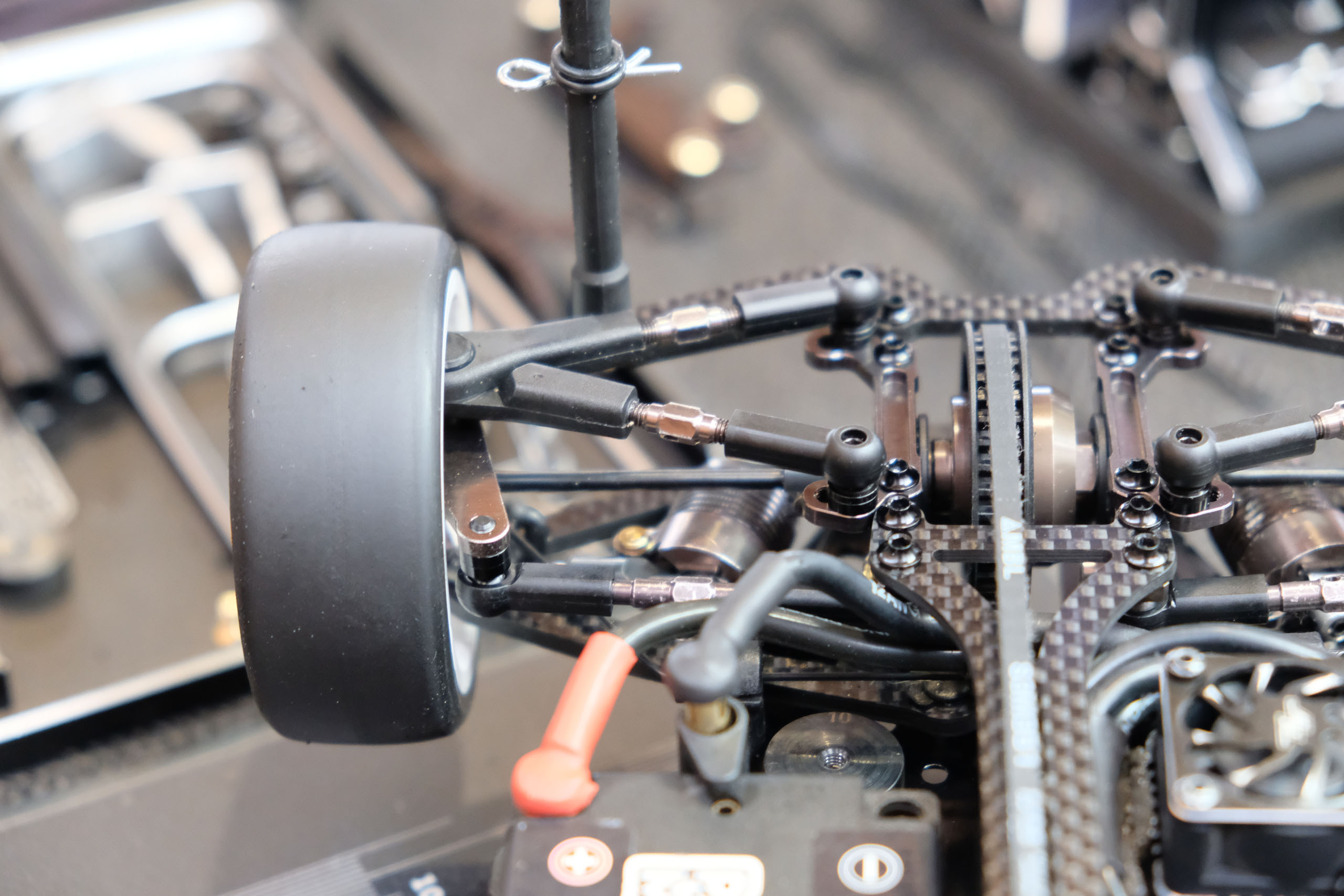
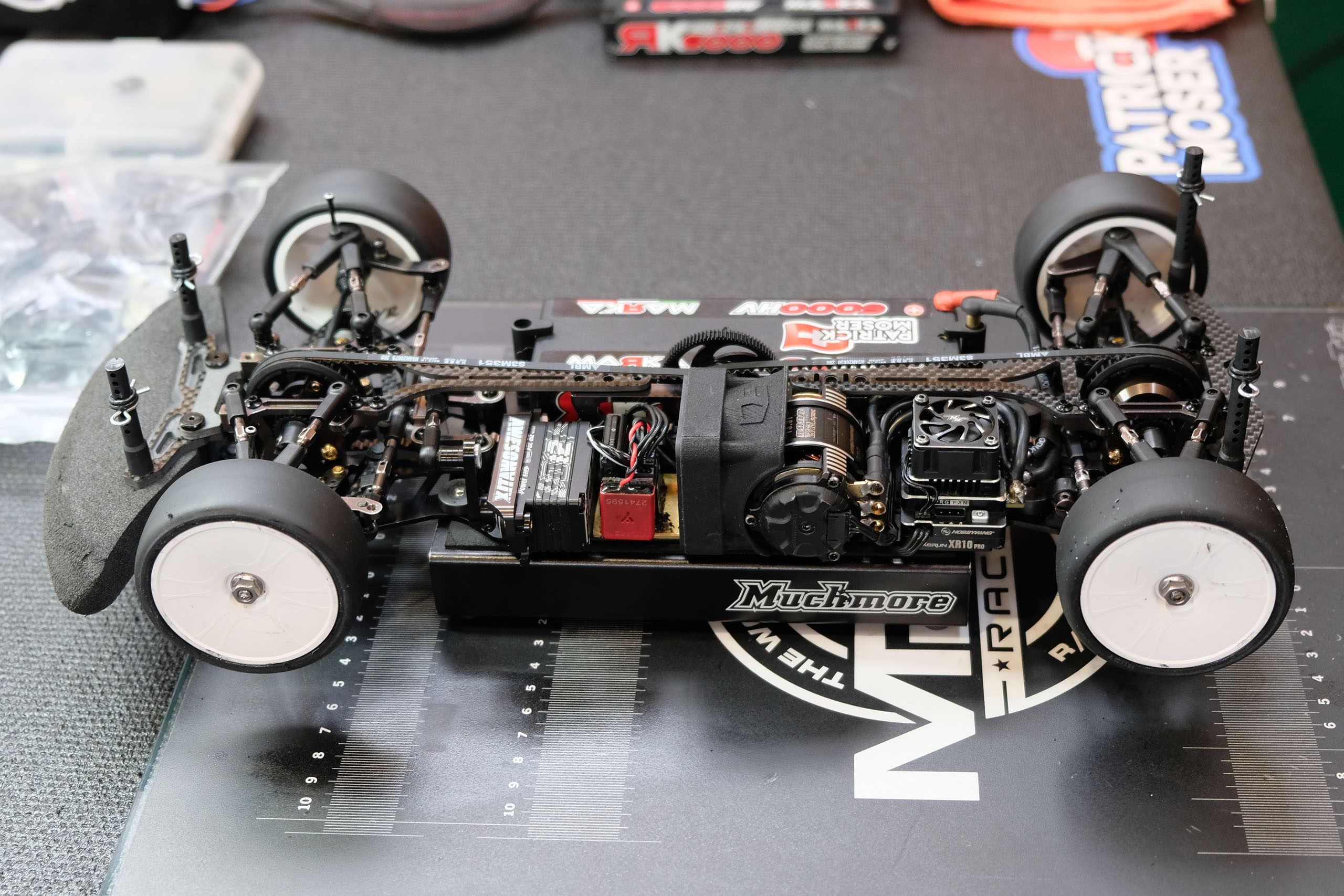
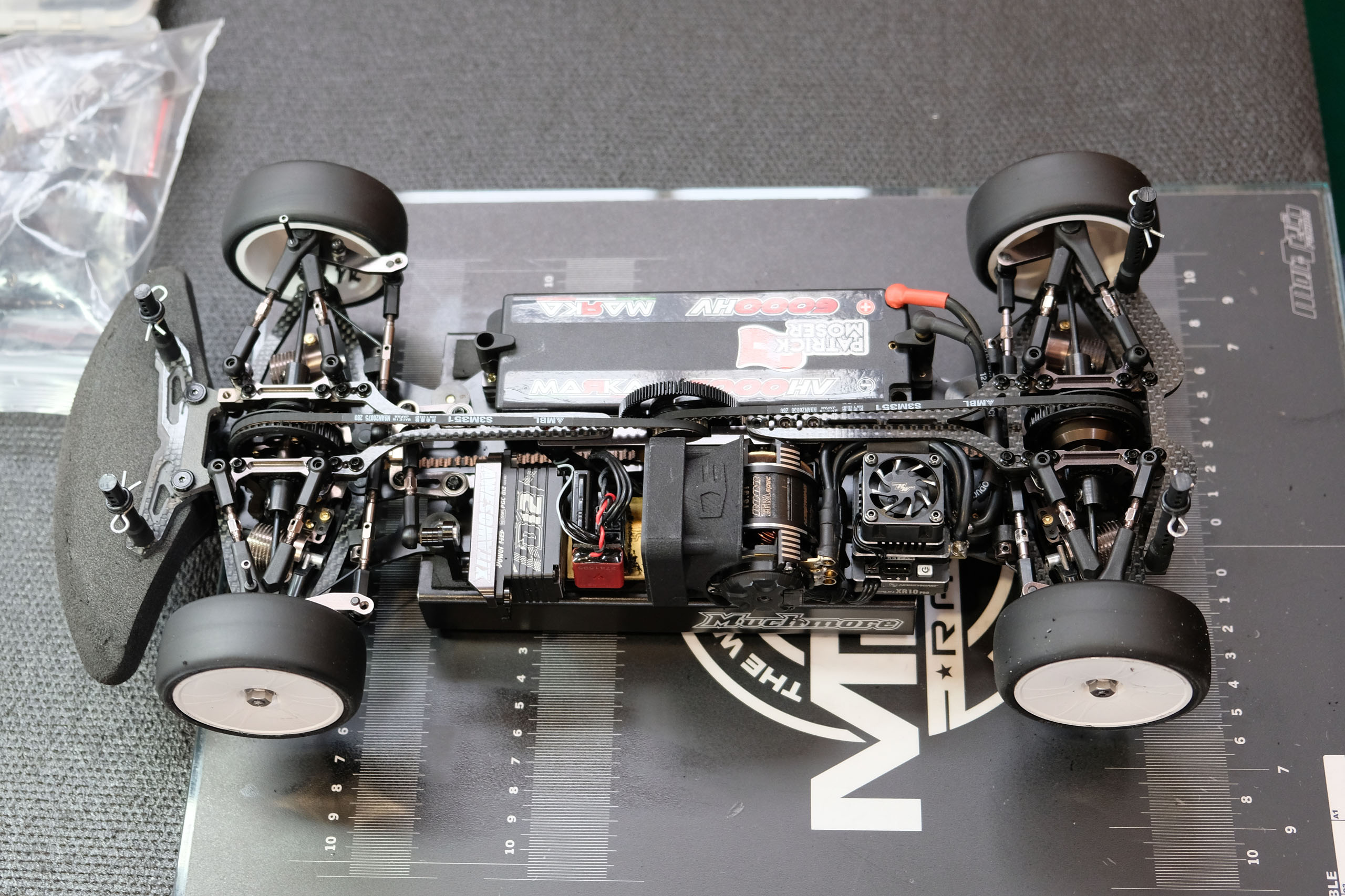
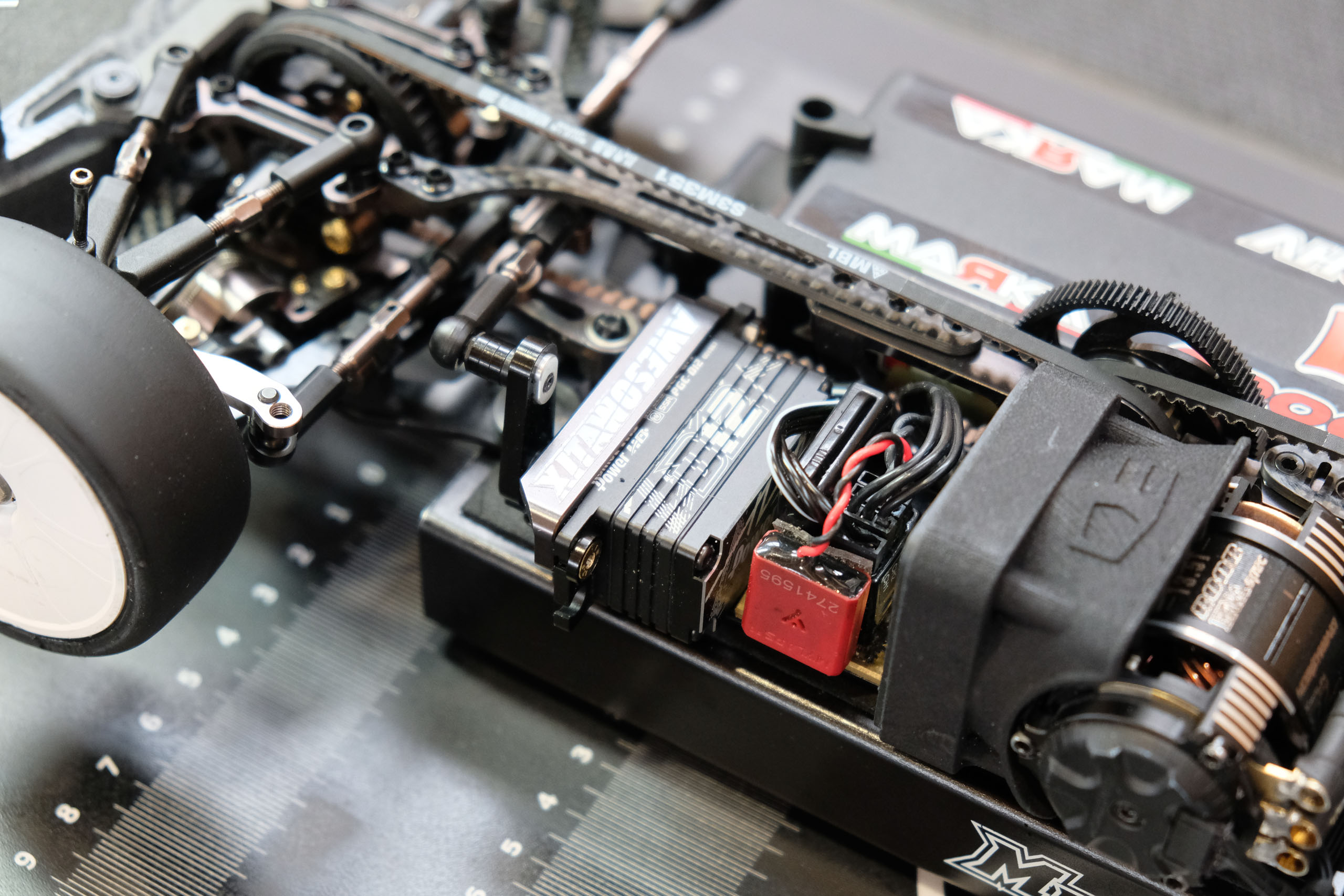
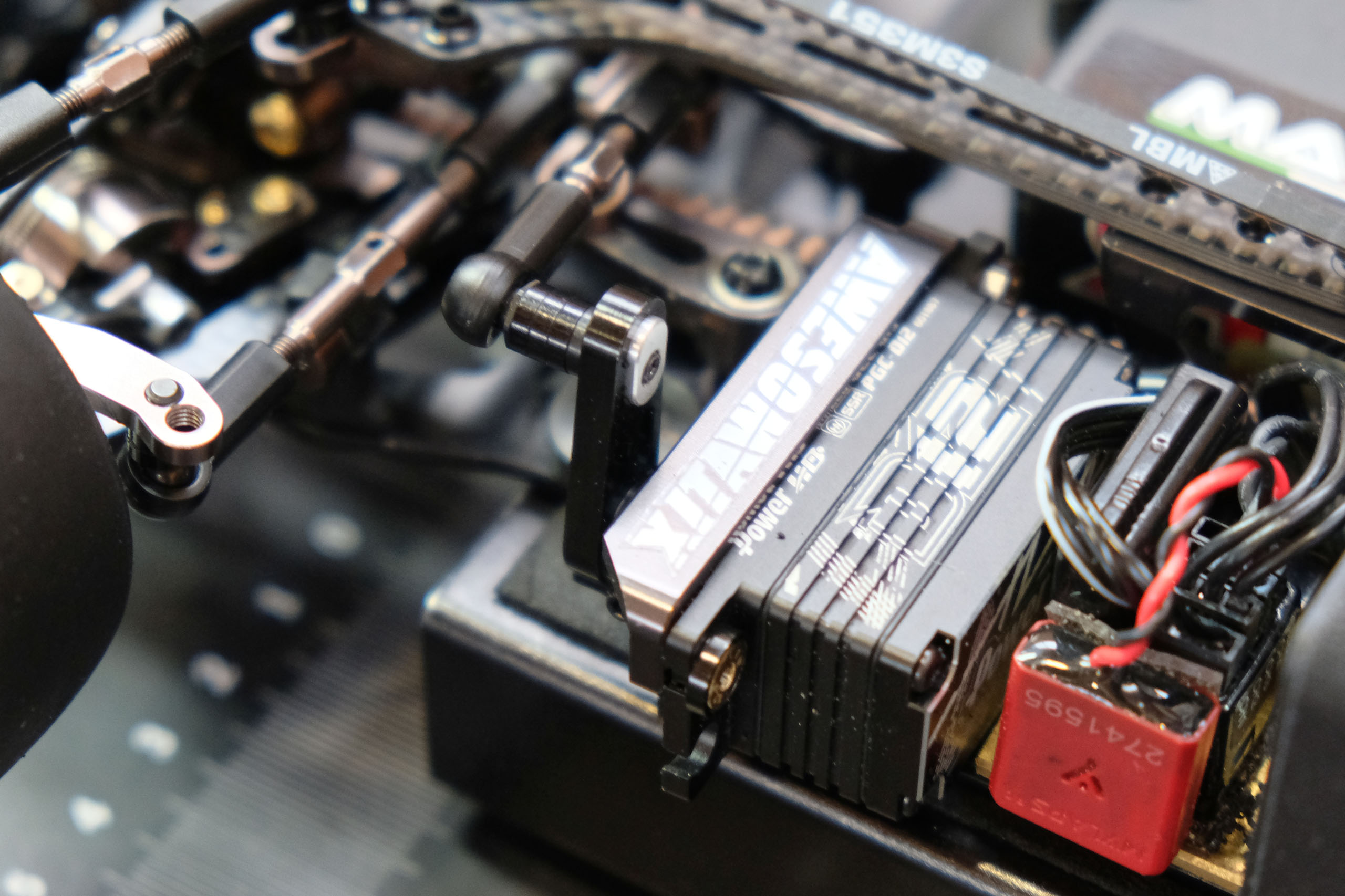
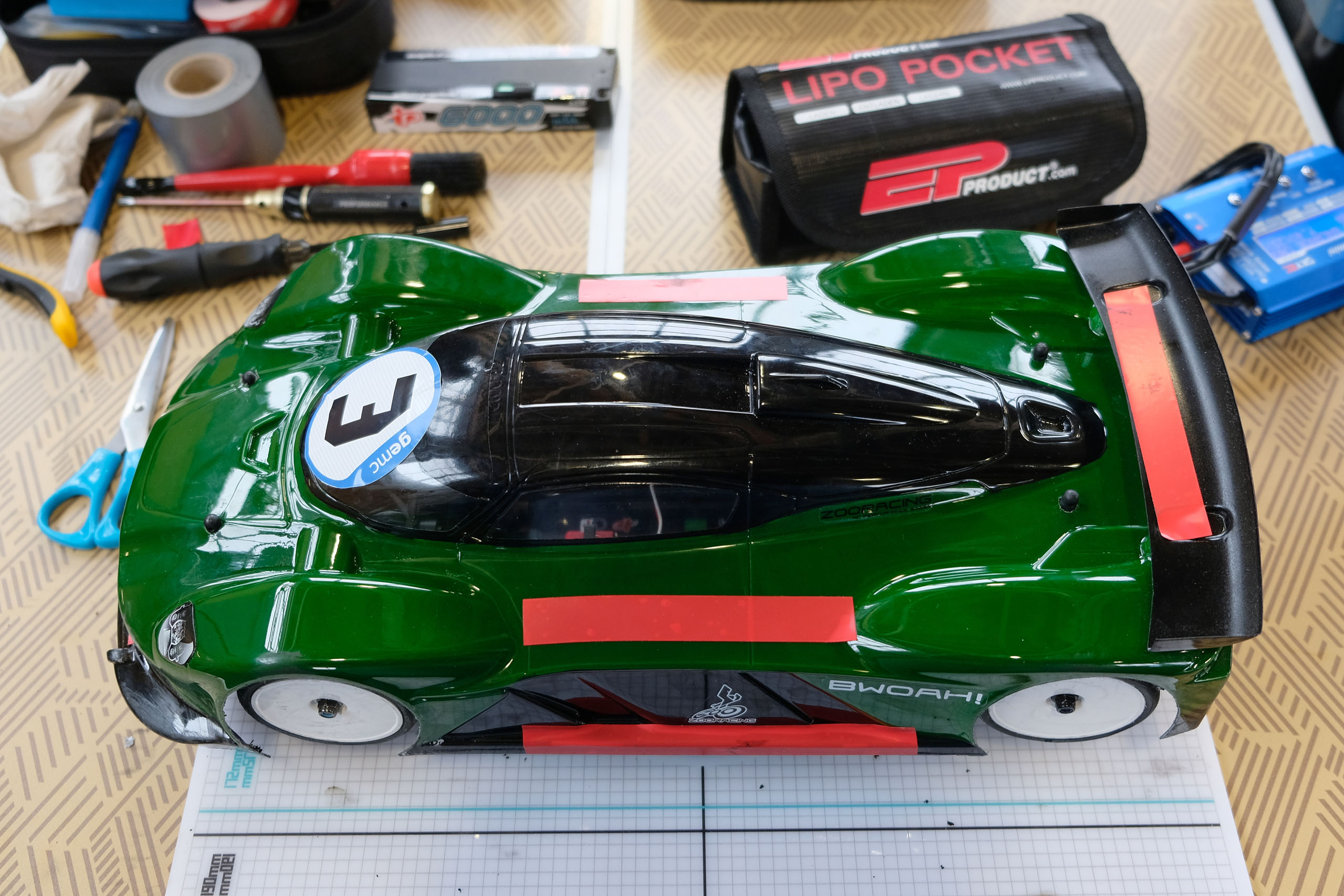
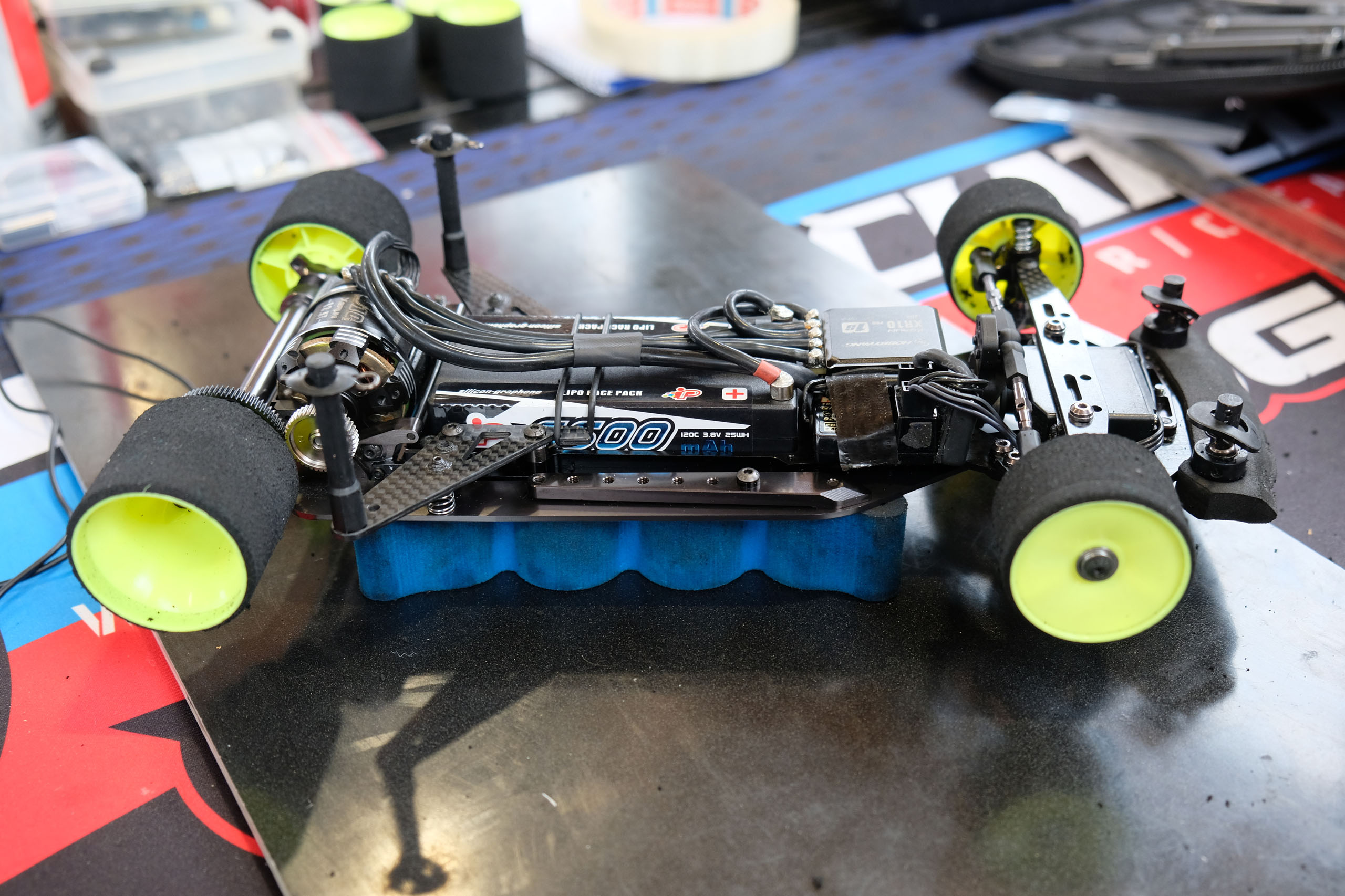
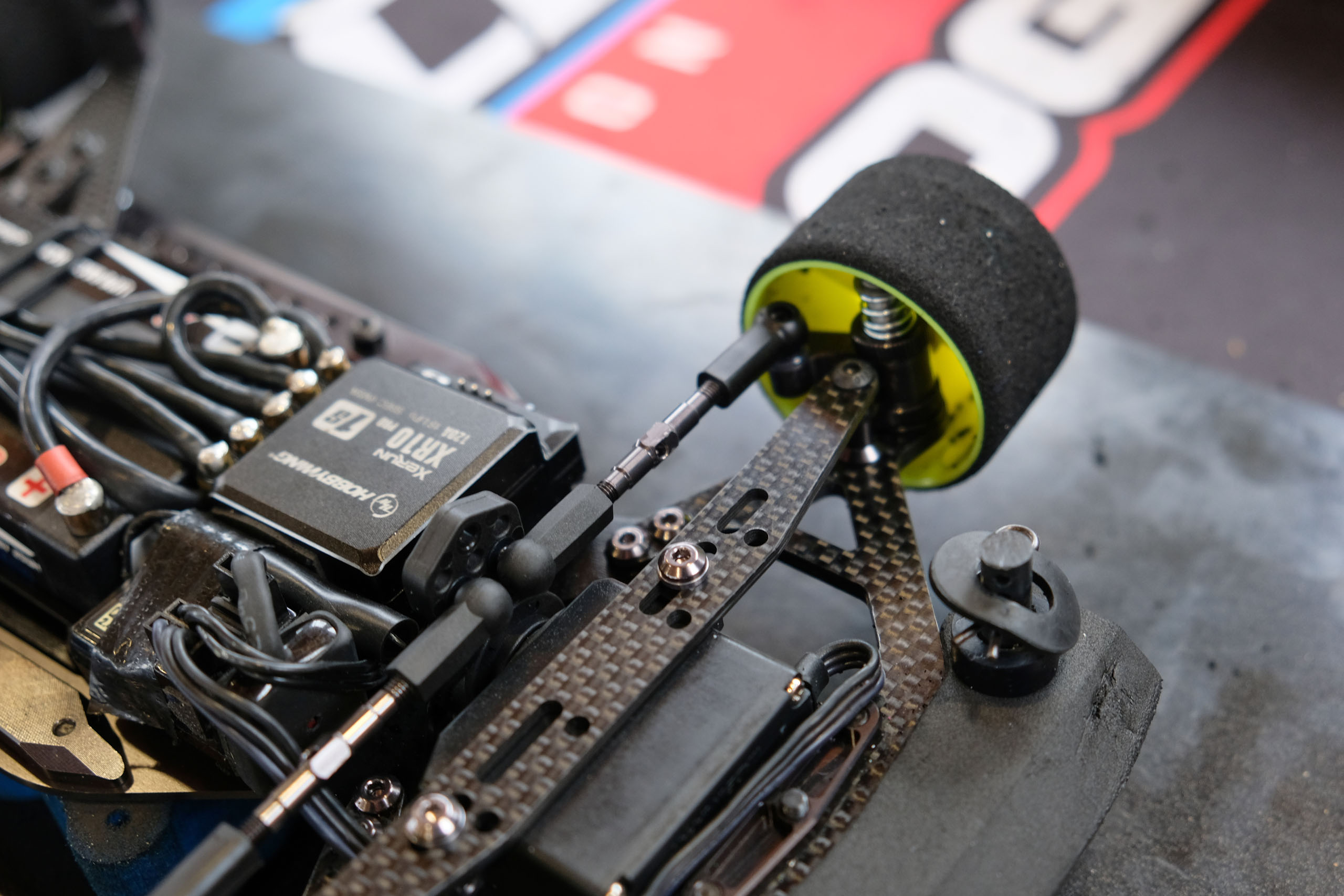
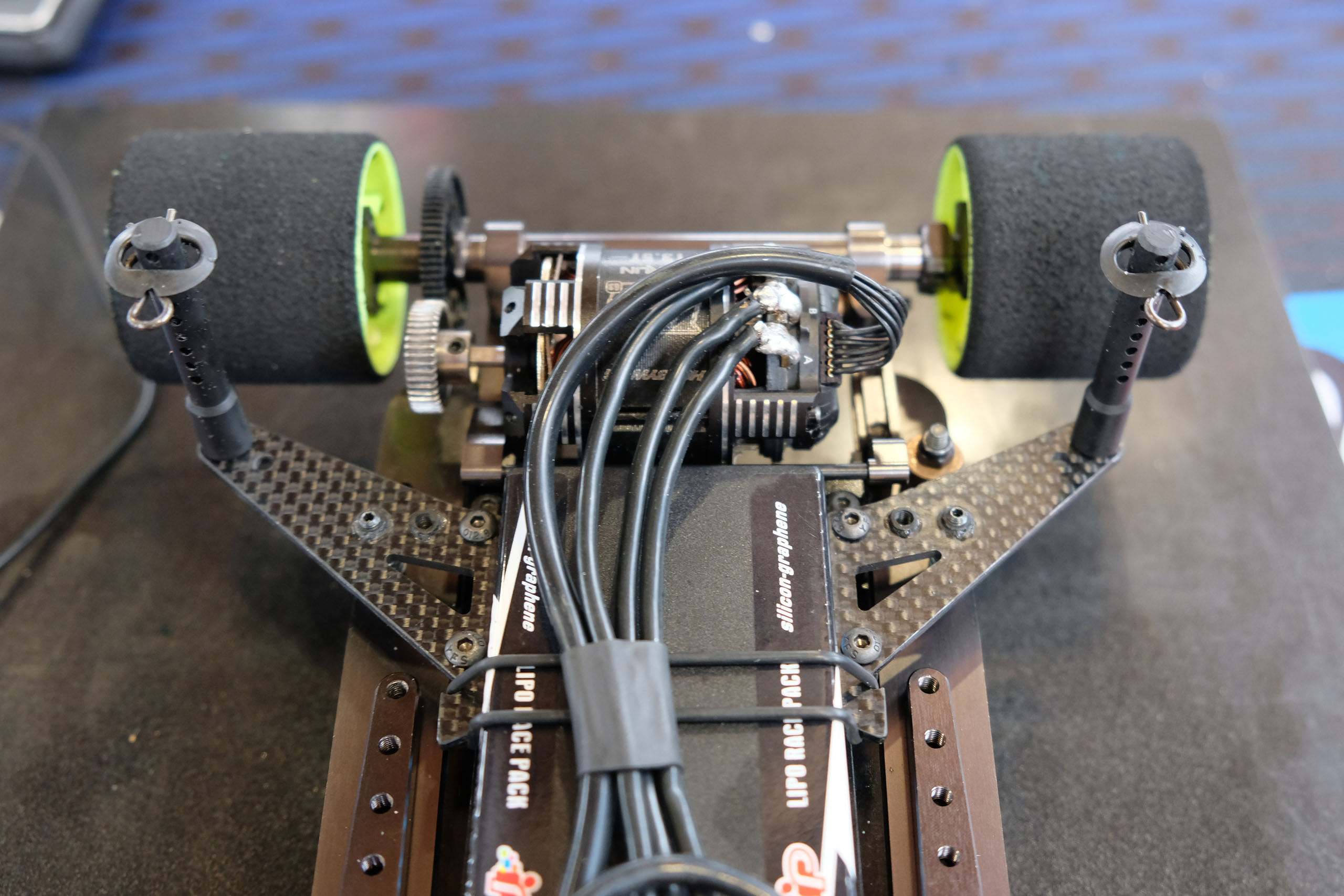
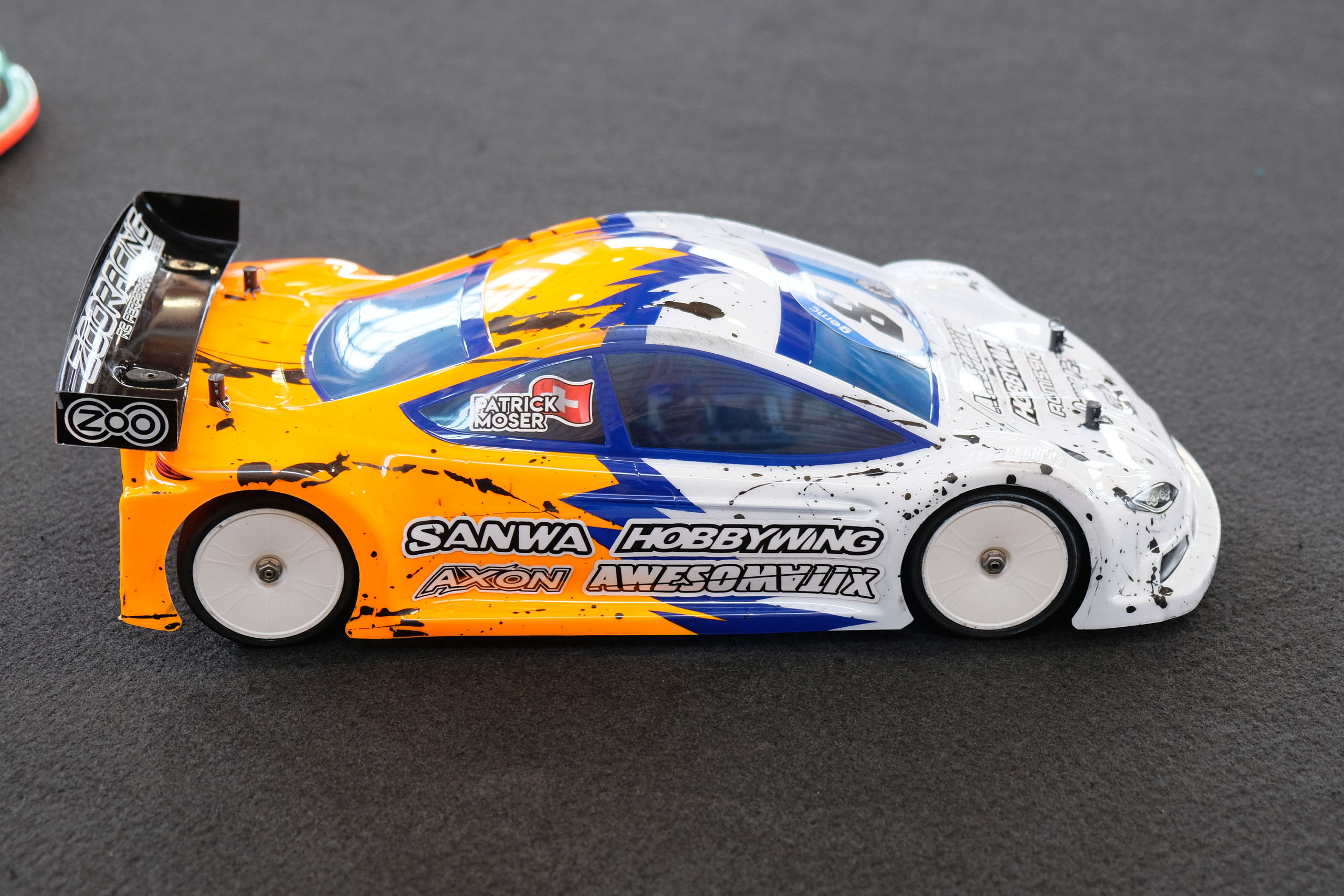
La Awesomatix A800 MMX de Patrick Moser.Malgré les sorties récentes, les Awesomatix restent bien présentes dans les stands et ne semblent pas vraiment déstabilisées par cette nouvelle concurrence. La A800MMX, en photos ci-dessous, appartient à Patrick Moser, un pilote habitué des podiums au championnat suisse Touring Car Stock. Son auto présente une configuration adoptée par la majorité des pilotes d'Awesomatix, à savoir châssis en aluminium et platines en deux parties, avec une souple à l'avant et une plus rigide à l'arrière. Toutefois, ce pilote a adopté la direction à double renvois en lieu et place du renvoi central d'origine. On peut noter également la présence d'une pièce en plastique (probablement imprimée en 3D) reliant les cellule avant à la platine de parechoc en carbone, ainsi que d'un canal de ventilation associé à un ventilateur de 40x40mm pour bien refroidir le moteur. Comme la majorité du plateau, cette auto était équipée d'un contrôleur XR10 Pro G2 et d'un moteur XRun V10 G3 de chez Hobbywing. Le servo est un PowerHD D12 compatible SSR (qui possède un sortie câble du côté opposé à la tête pour le palonnier, chose encore trop rare malheureusement) associé à un ensemble radio Sanwa. Les batteries LiPo sont de la marque italienne Marka Racing, et la carrosserie est une Wolverine de marque ZooRacing. On a oublié dans le reportage consacré à la première manche des IndoorSeries 2021-2022 une information susceptible d'intéresser les pilotes Awesomatix participant à ce championnat, à savoir que la fiche de set-up de la A800MMX du poleman et du vainqueur de cette première manche, Bastien de Marco (qui a fini troisième de cette manche) était disponible sur le Wiki du site du club GenevaModelCars. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
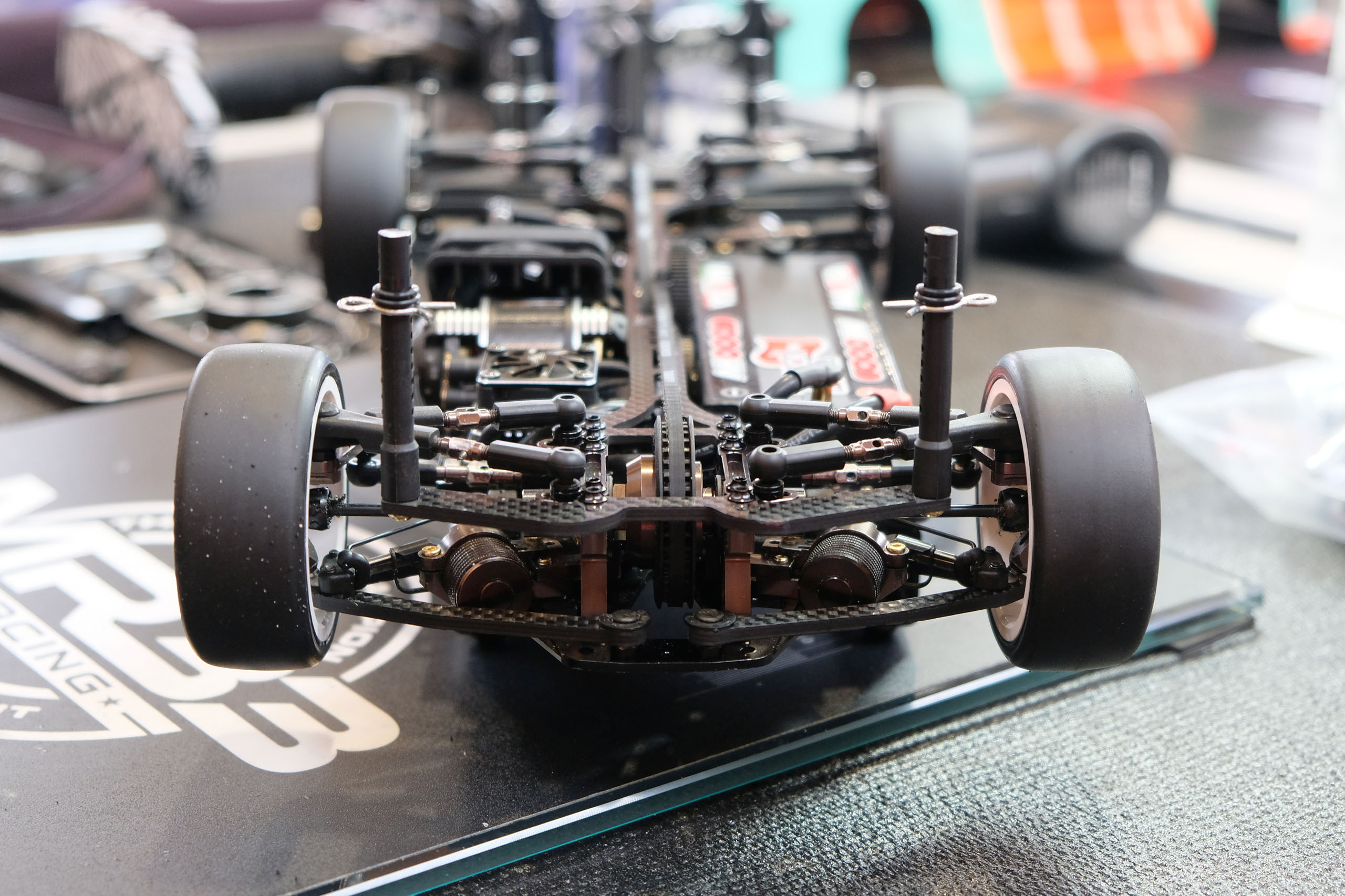
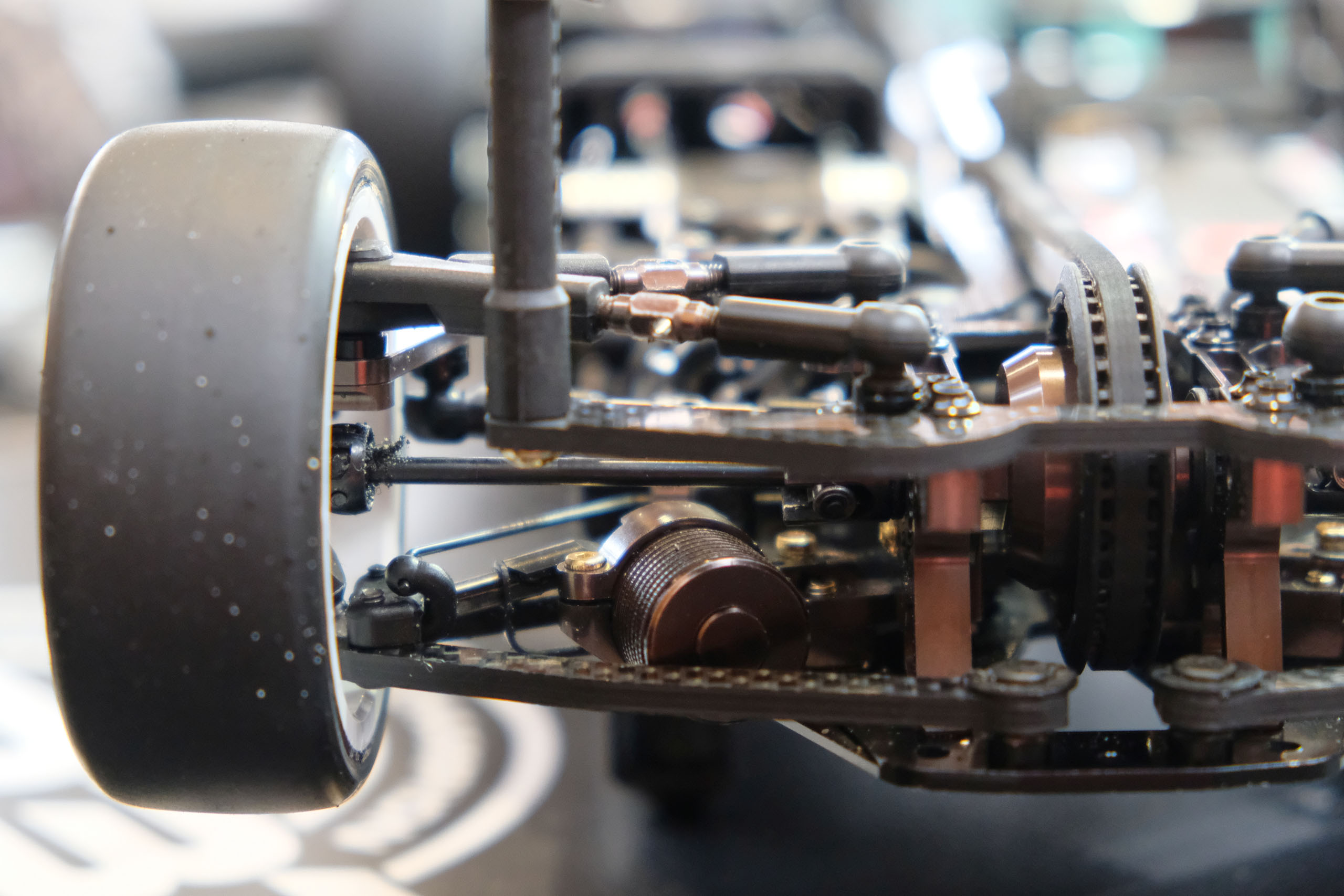
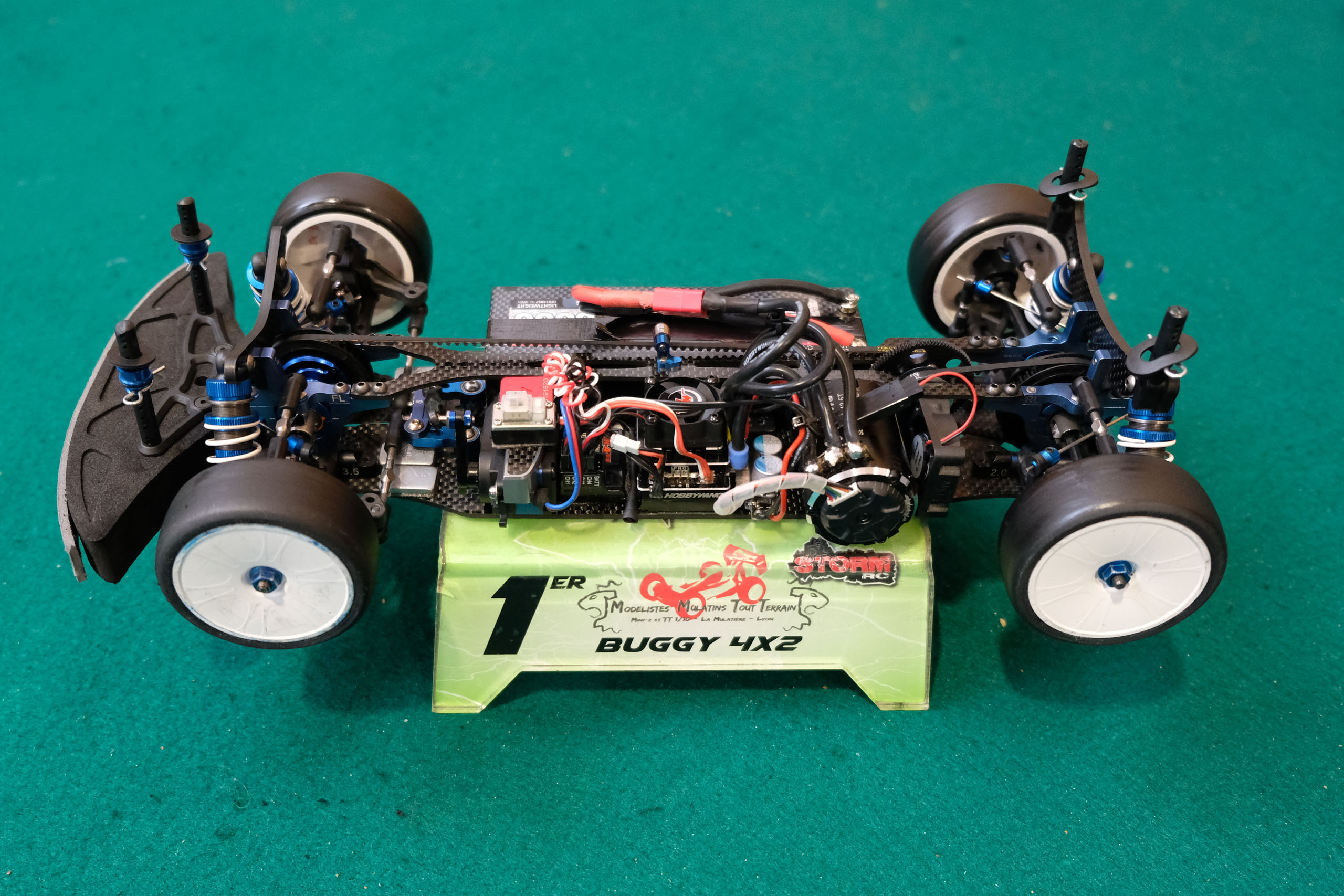
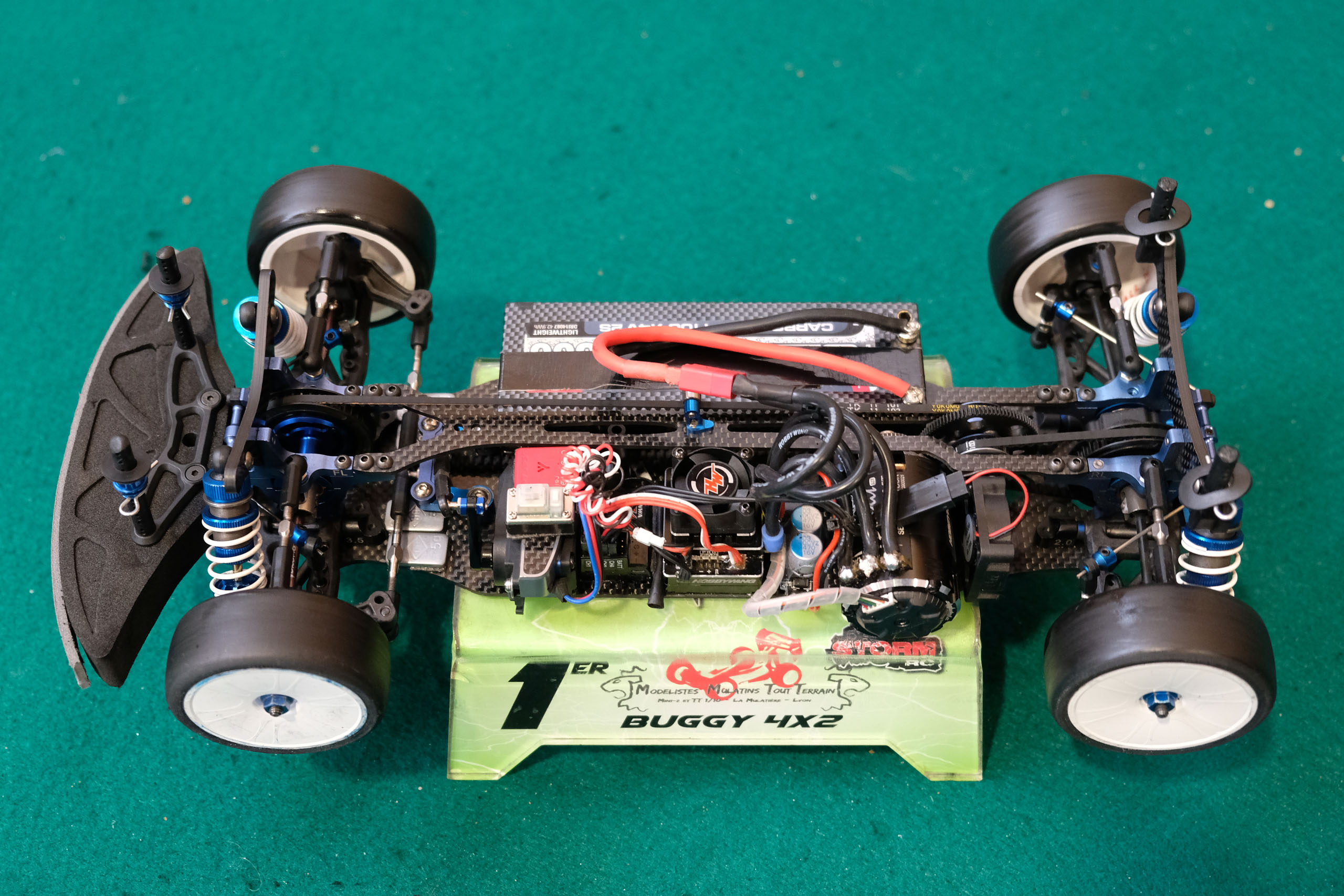
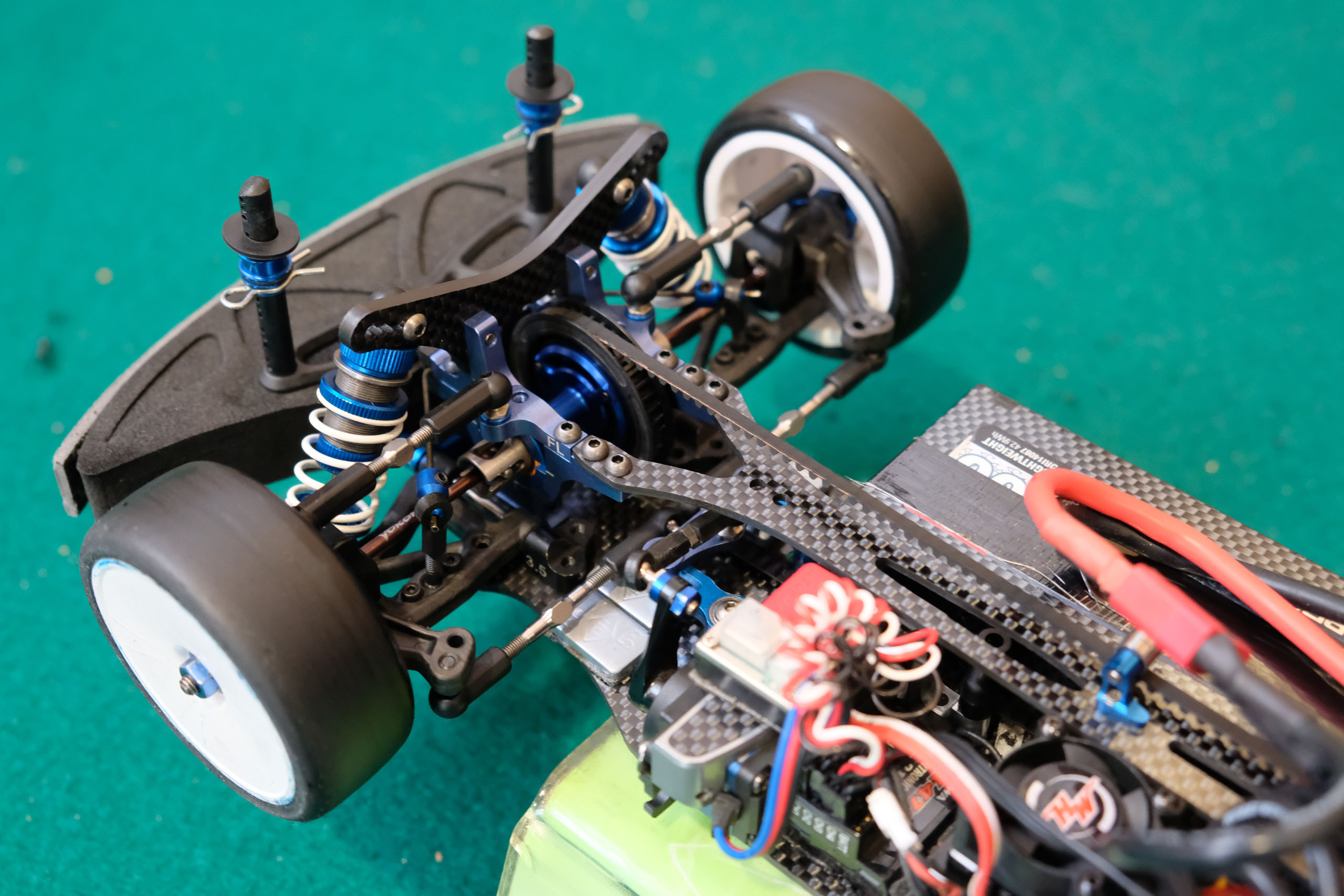
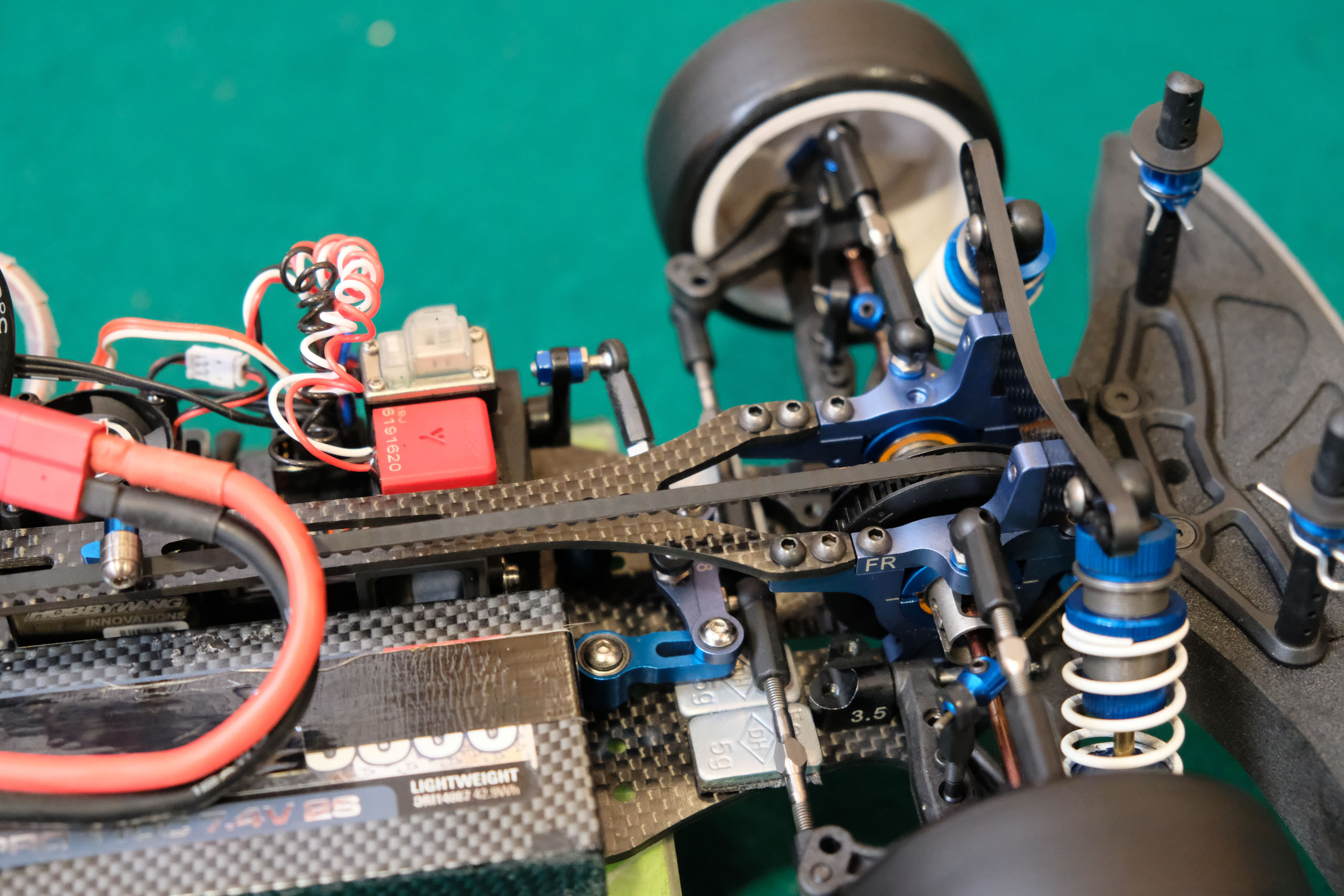
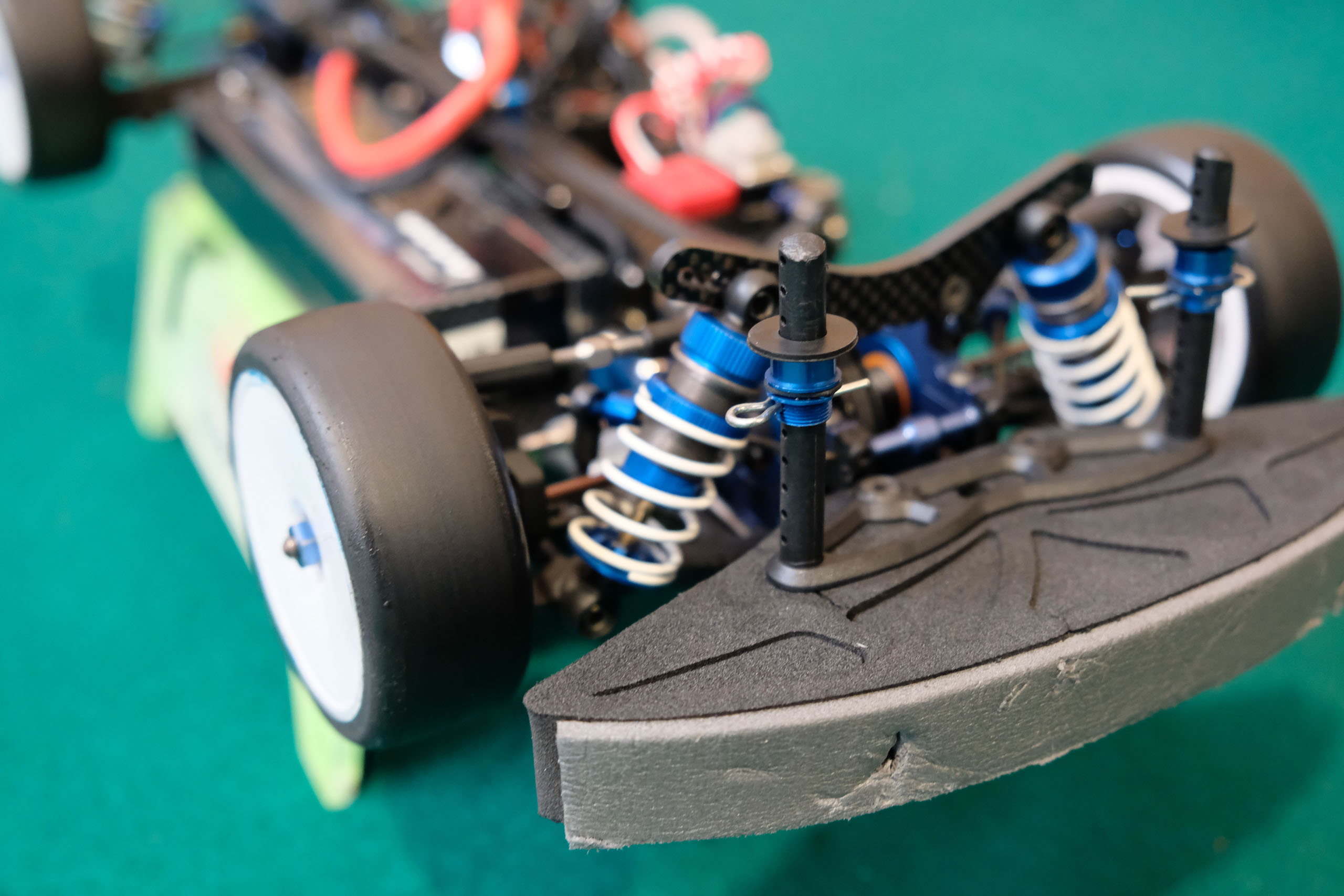
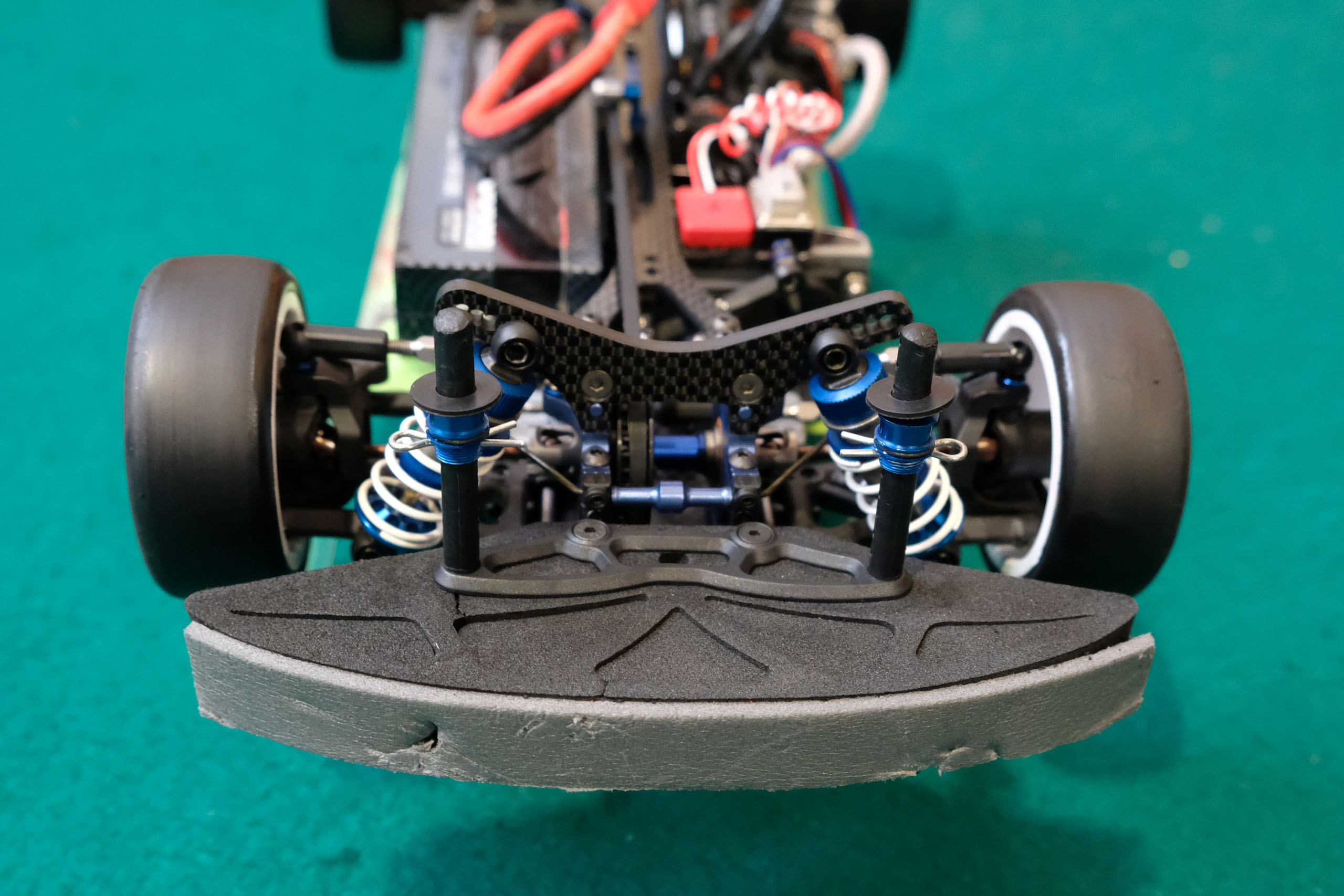
La Yokomo BD7 de Julien Brulé.Ce jeune pilote roulait avec une Yokomo BD7, qui date probablement de 2013, car la version 2014 était entièrement en livrée noire. Malgré son âge vénérable, cette belle auto possédait déjà beaucoup d'éléments technique modernes, comme des amortisseurs relativement de dimensions compactes, un flex de châssis bien étudié, des éléments de suspension rigides, un différentiel à pignons à l'arrière et un spool à l'avant, et un magnifique support flottant monobloc en aluminium pour le servo de direction. Bref, nul besoin d'un châssis de dernière génération pour se faire plaisir en compétition! |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
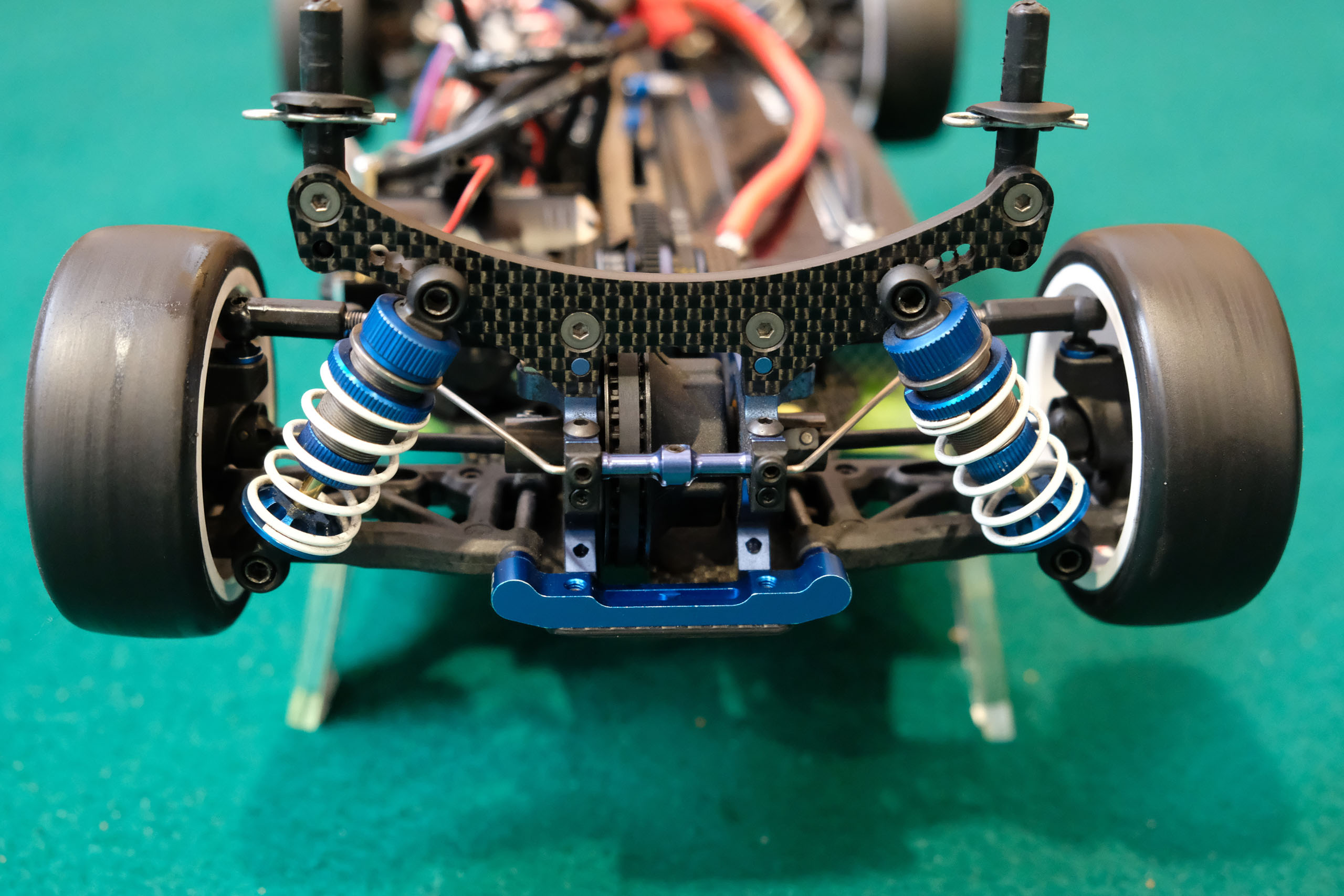 |
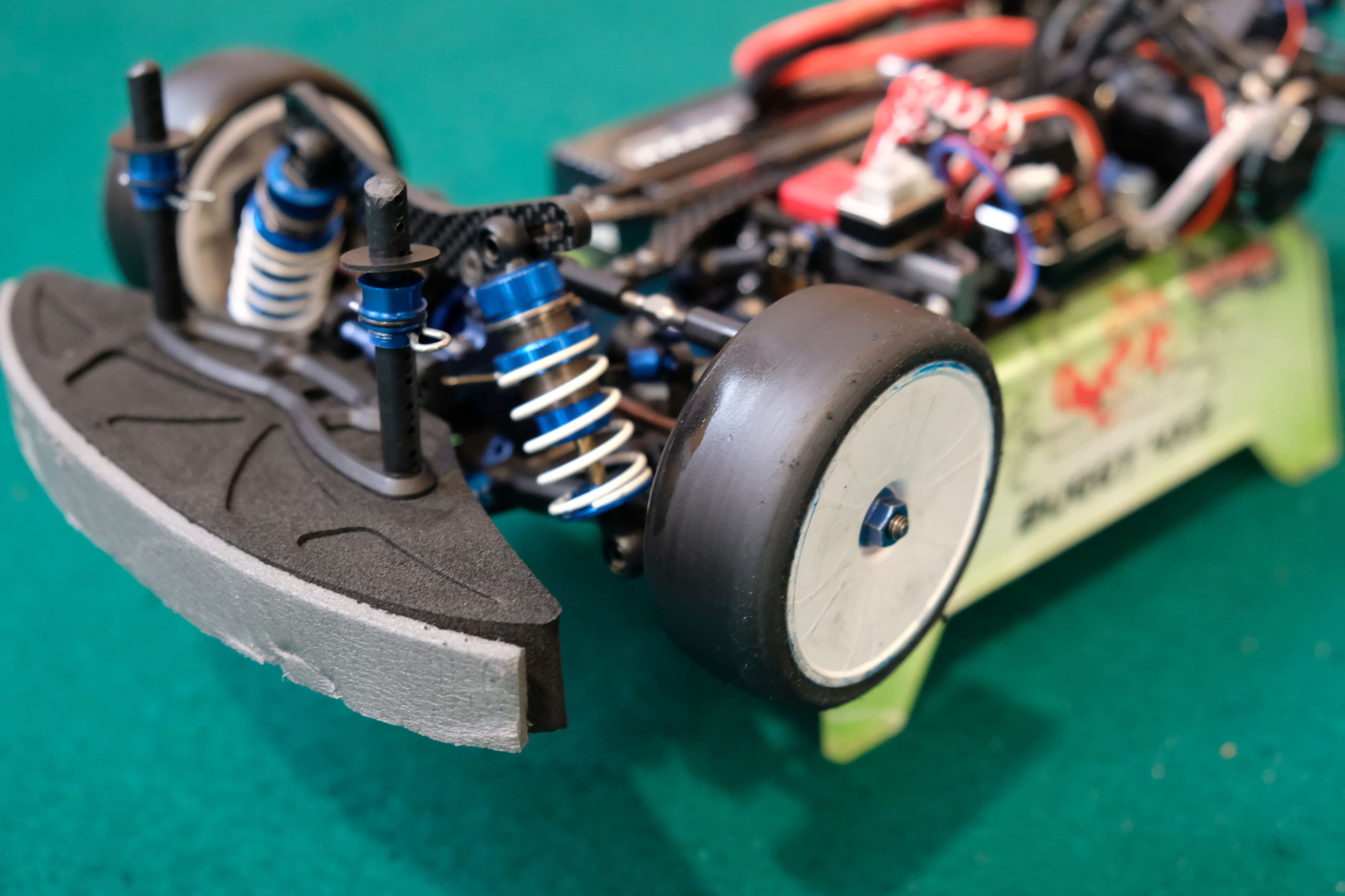
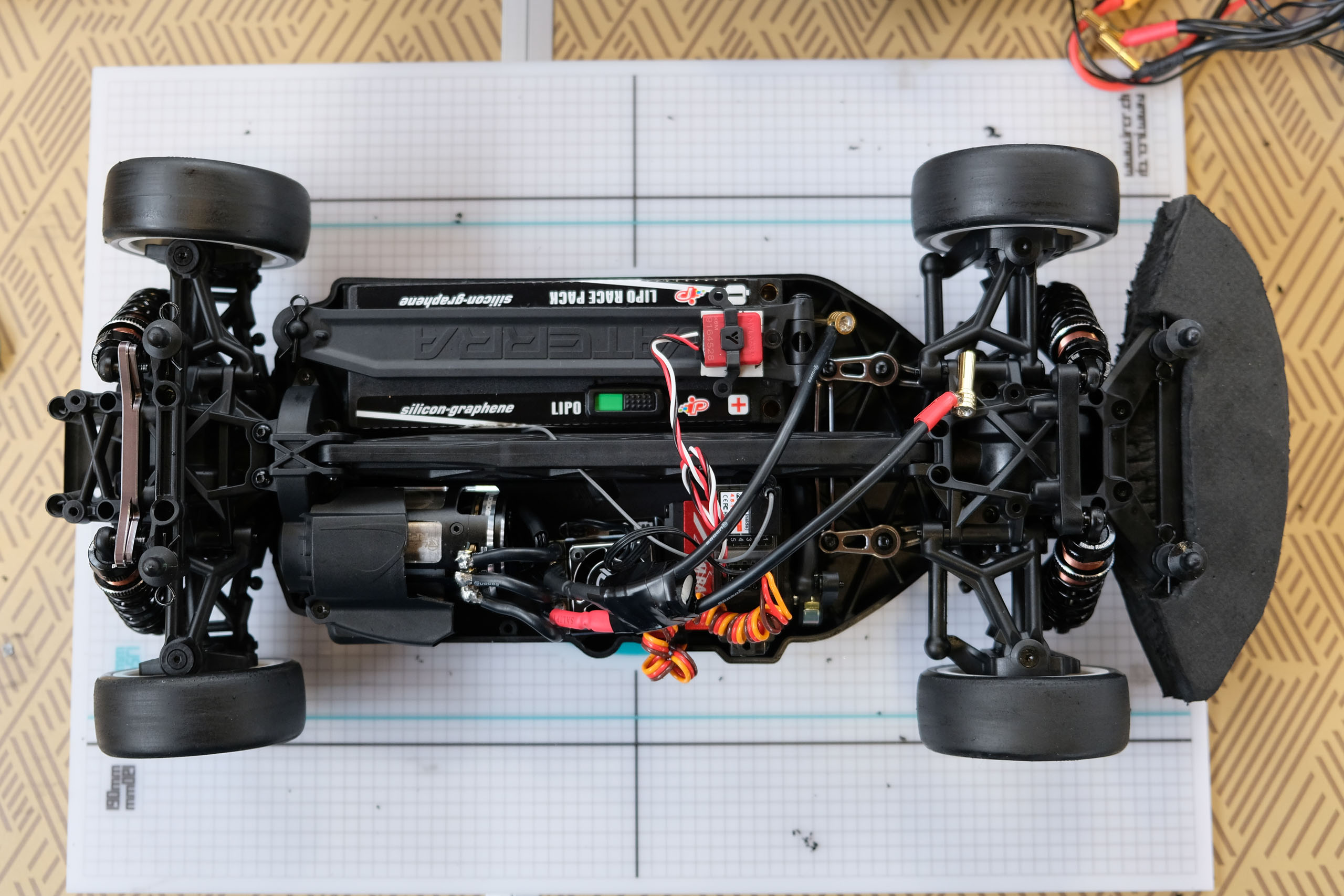
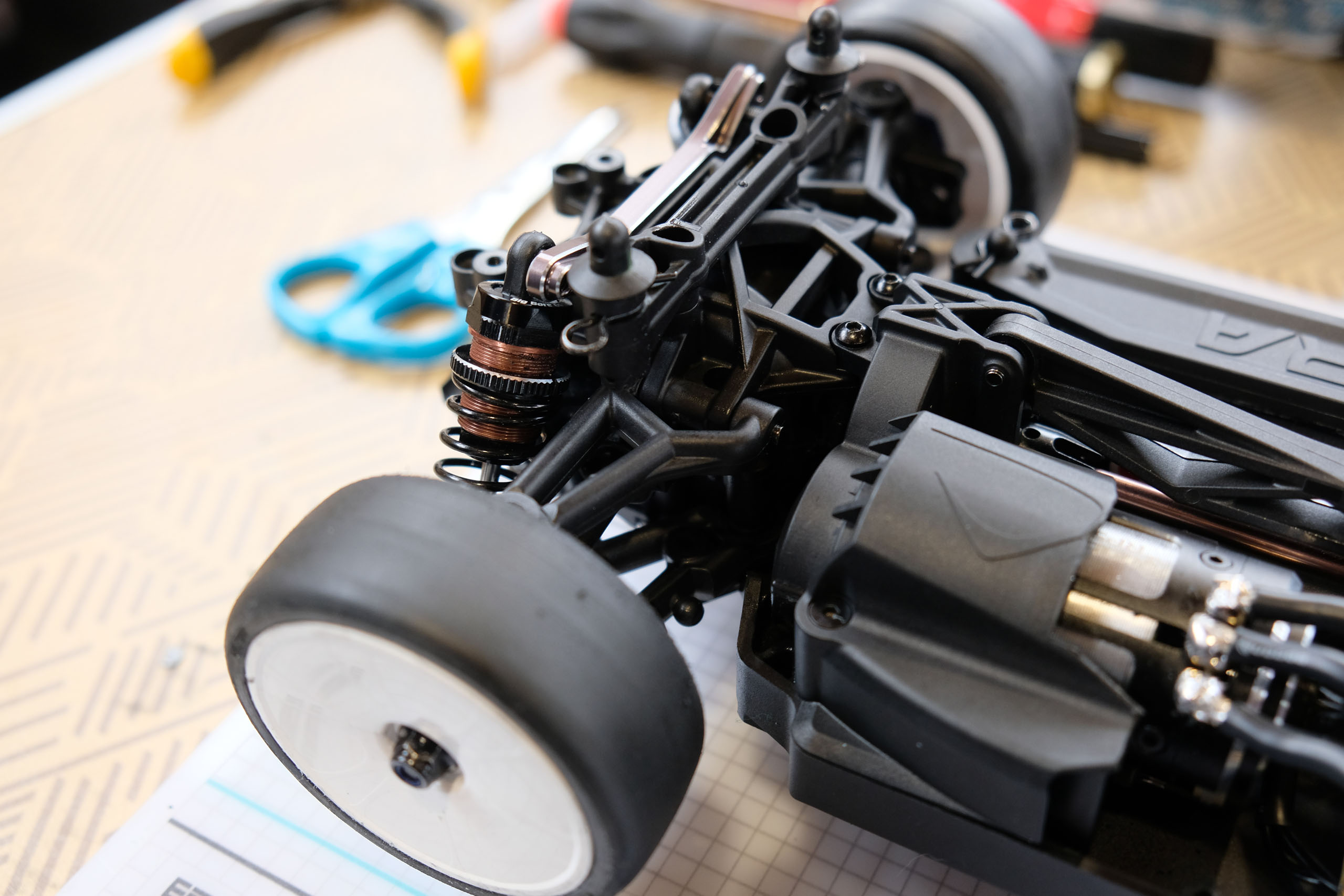
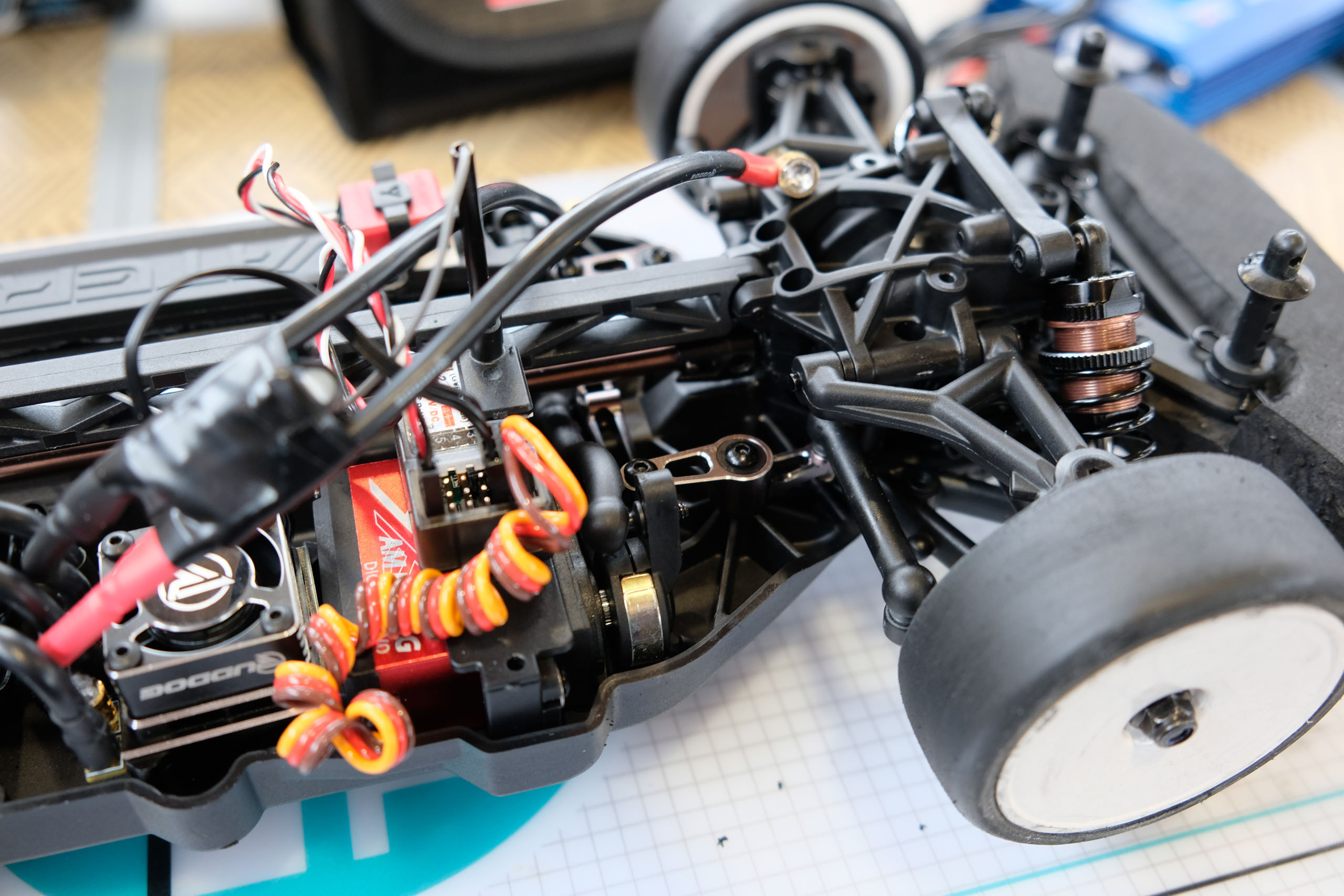
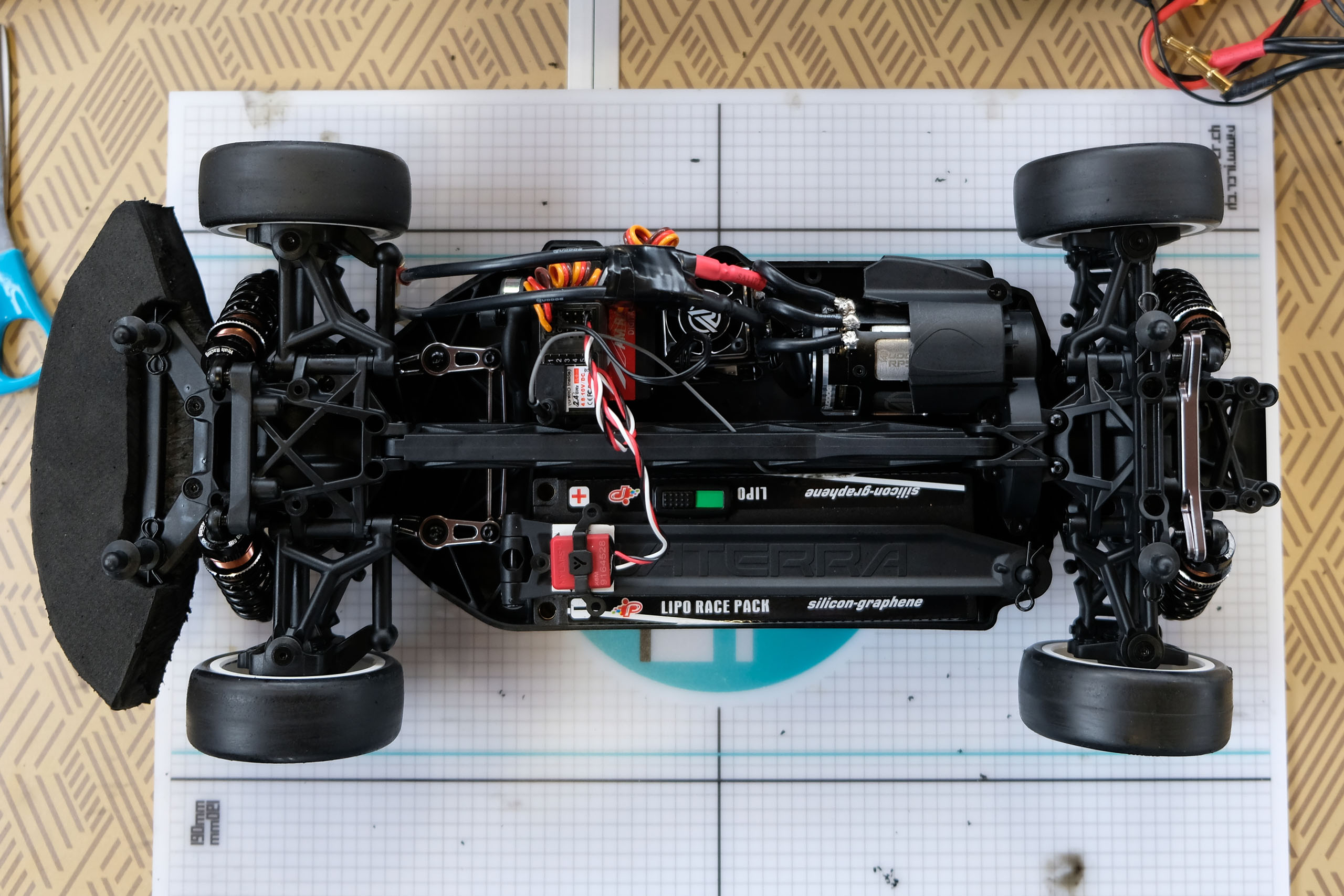
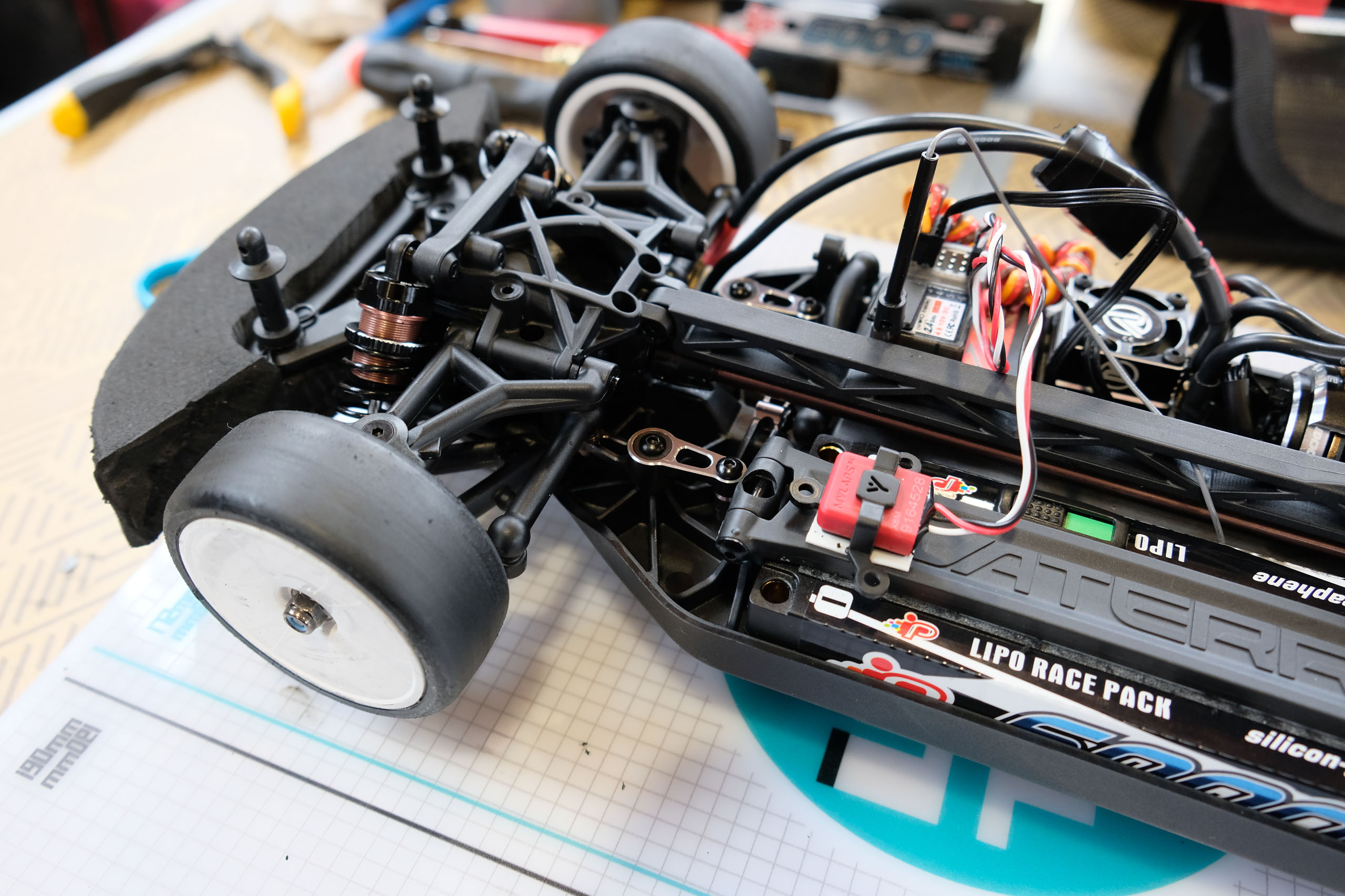
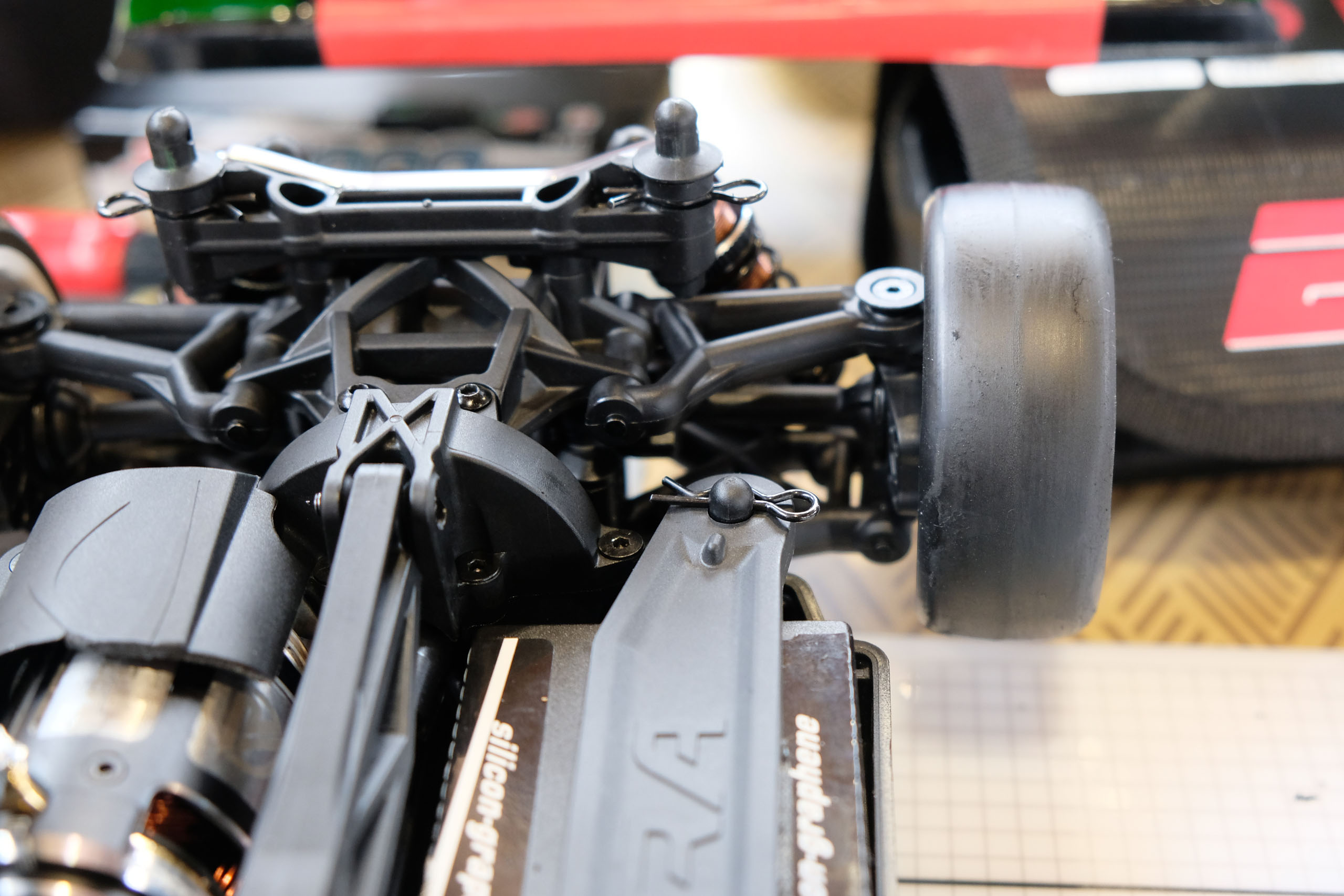
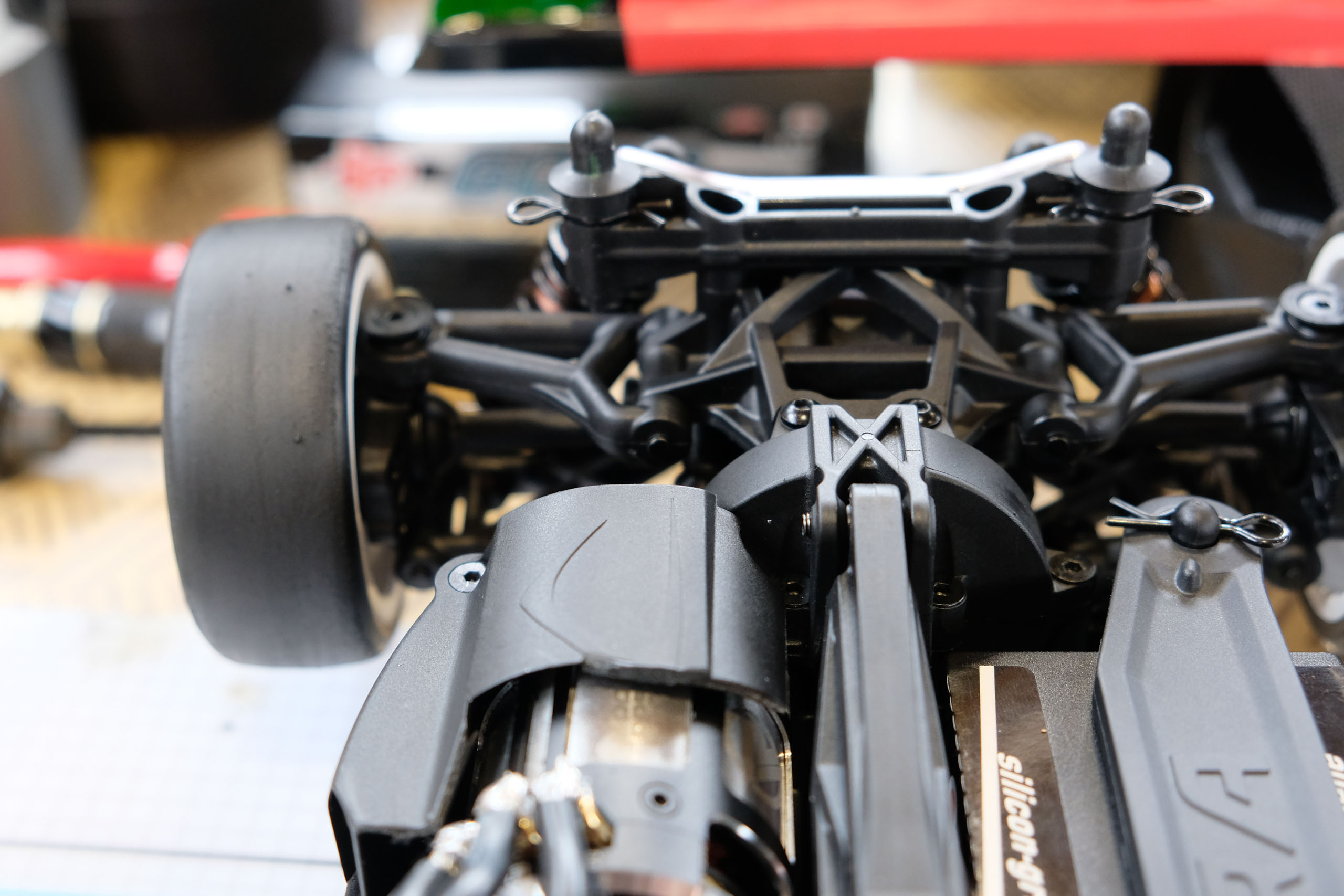
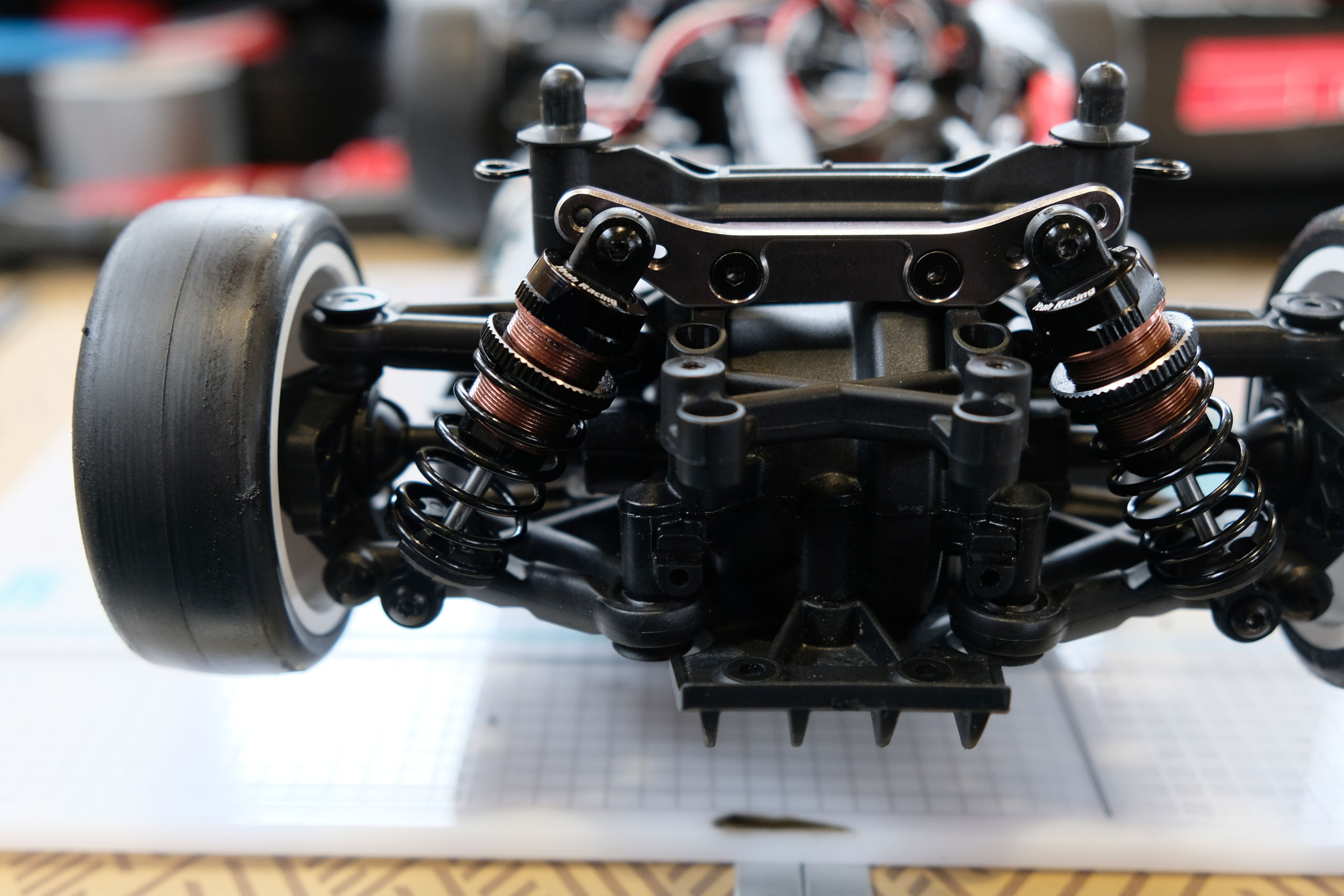
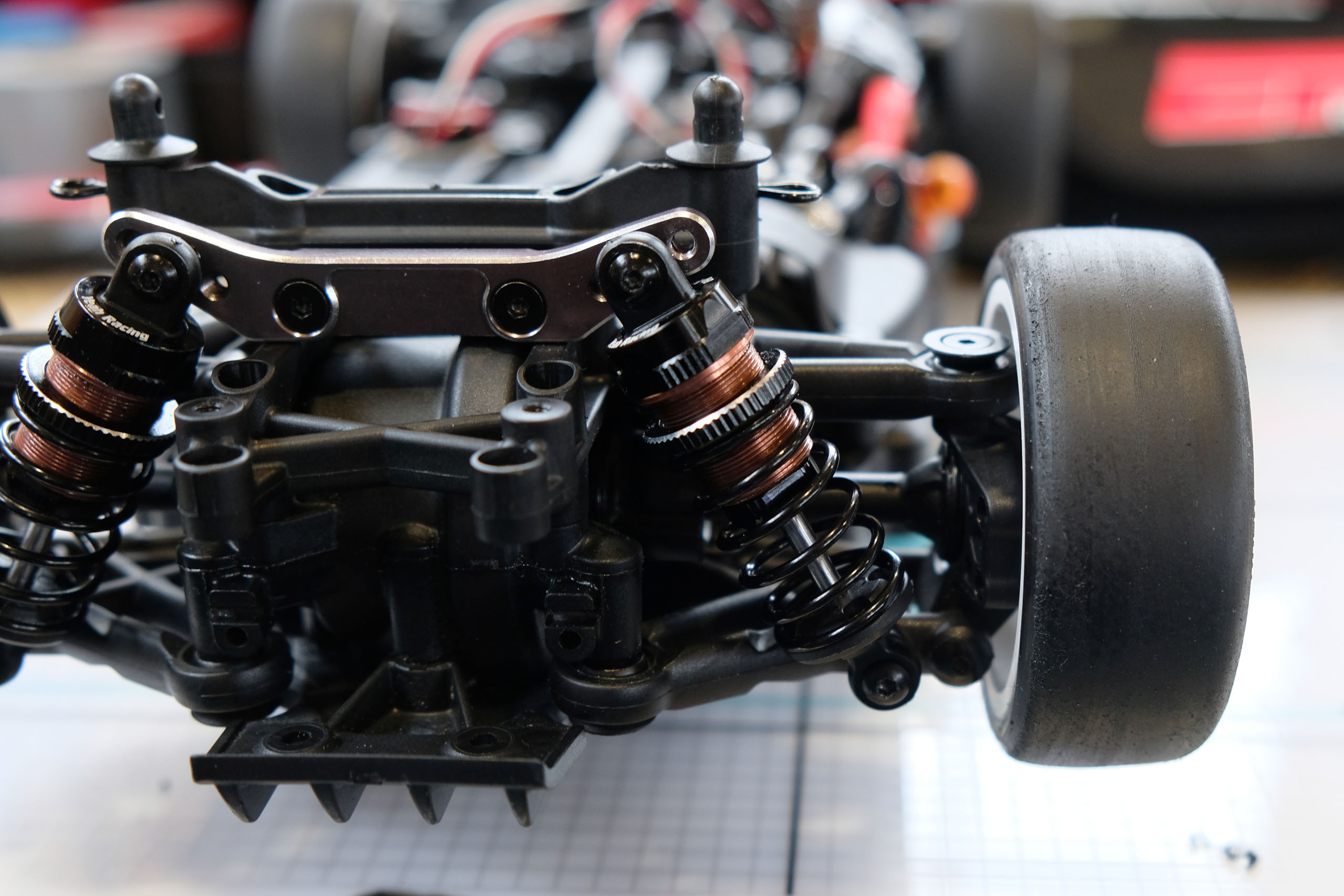
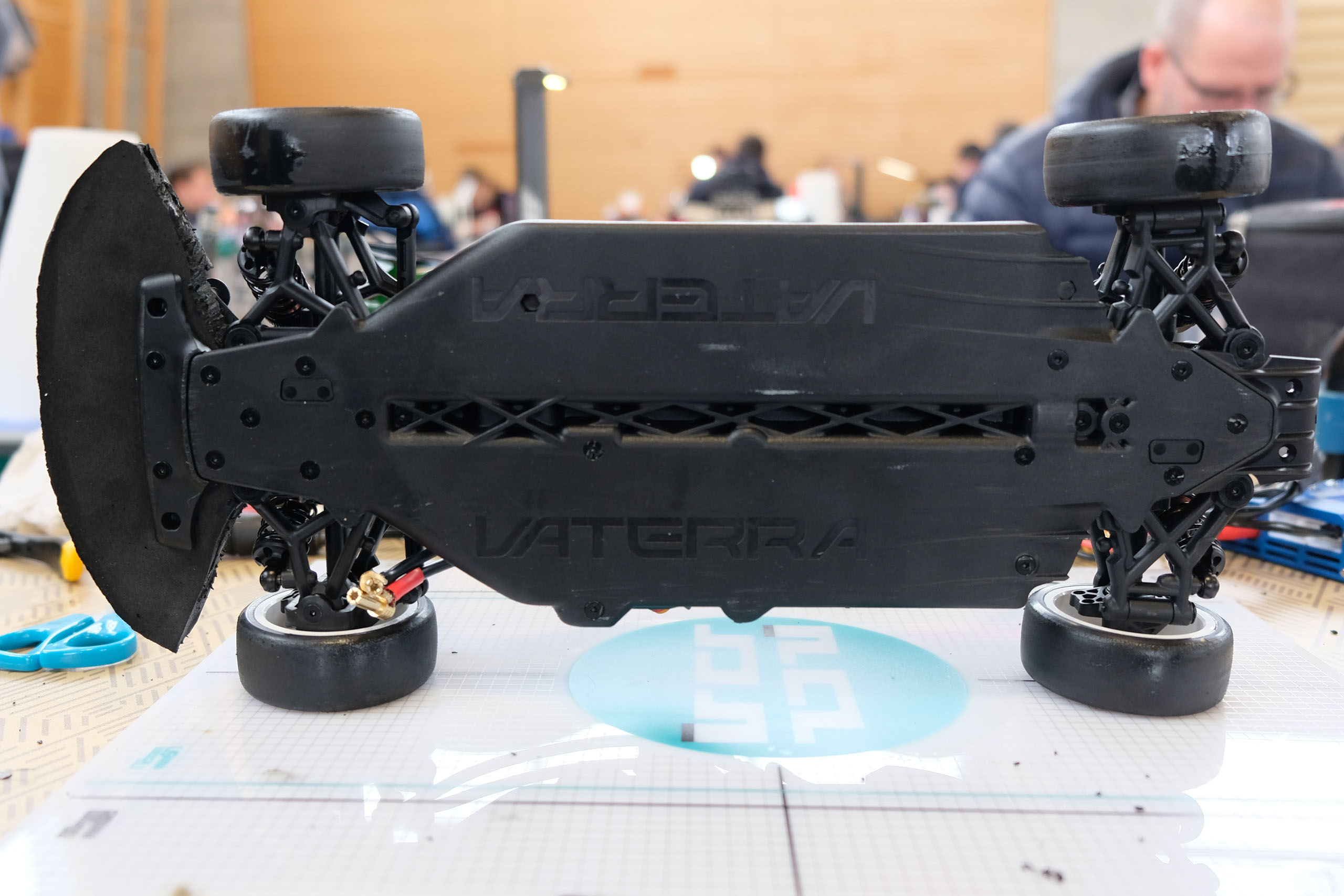
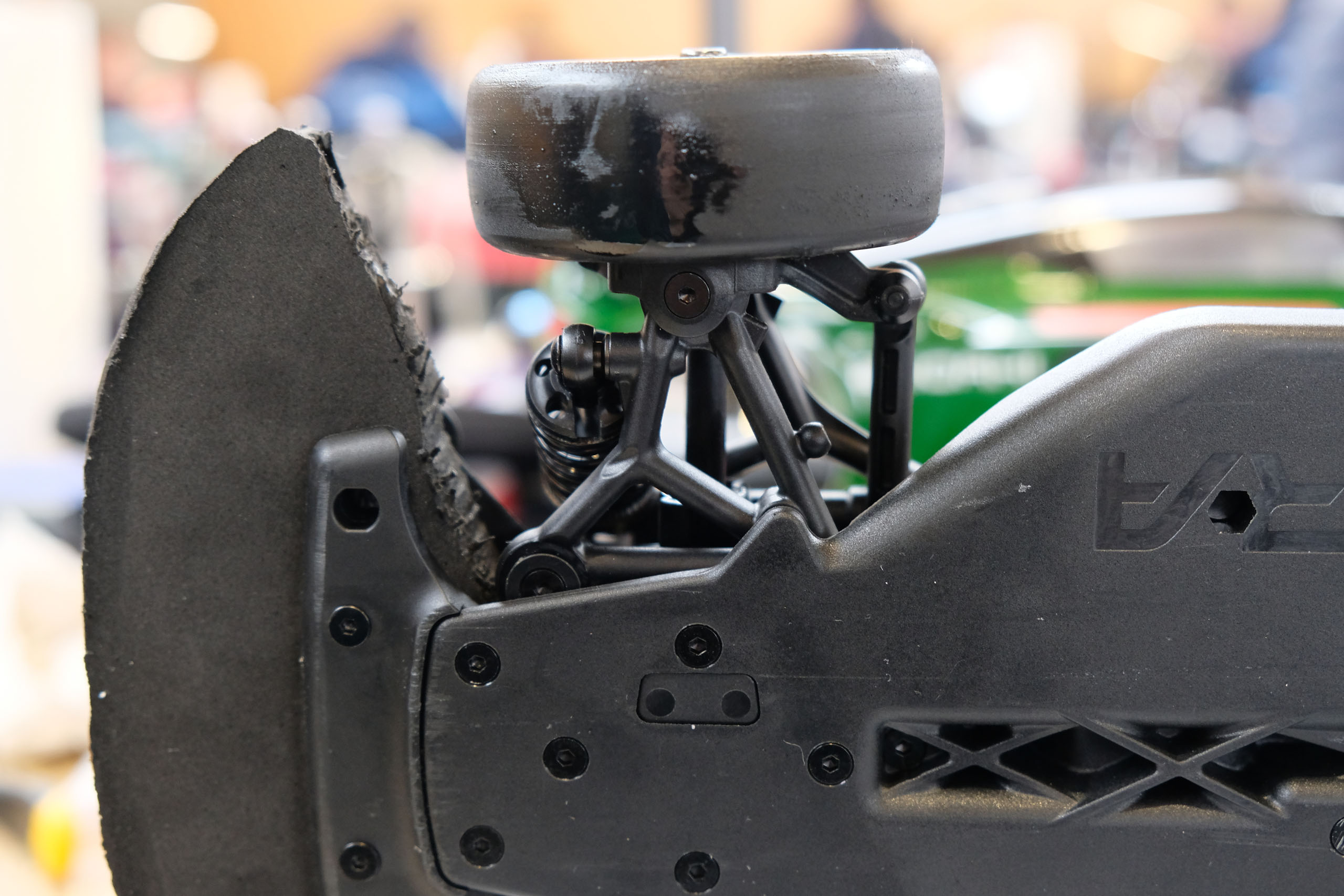
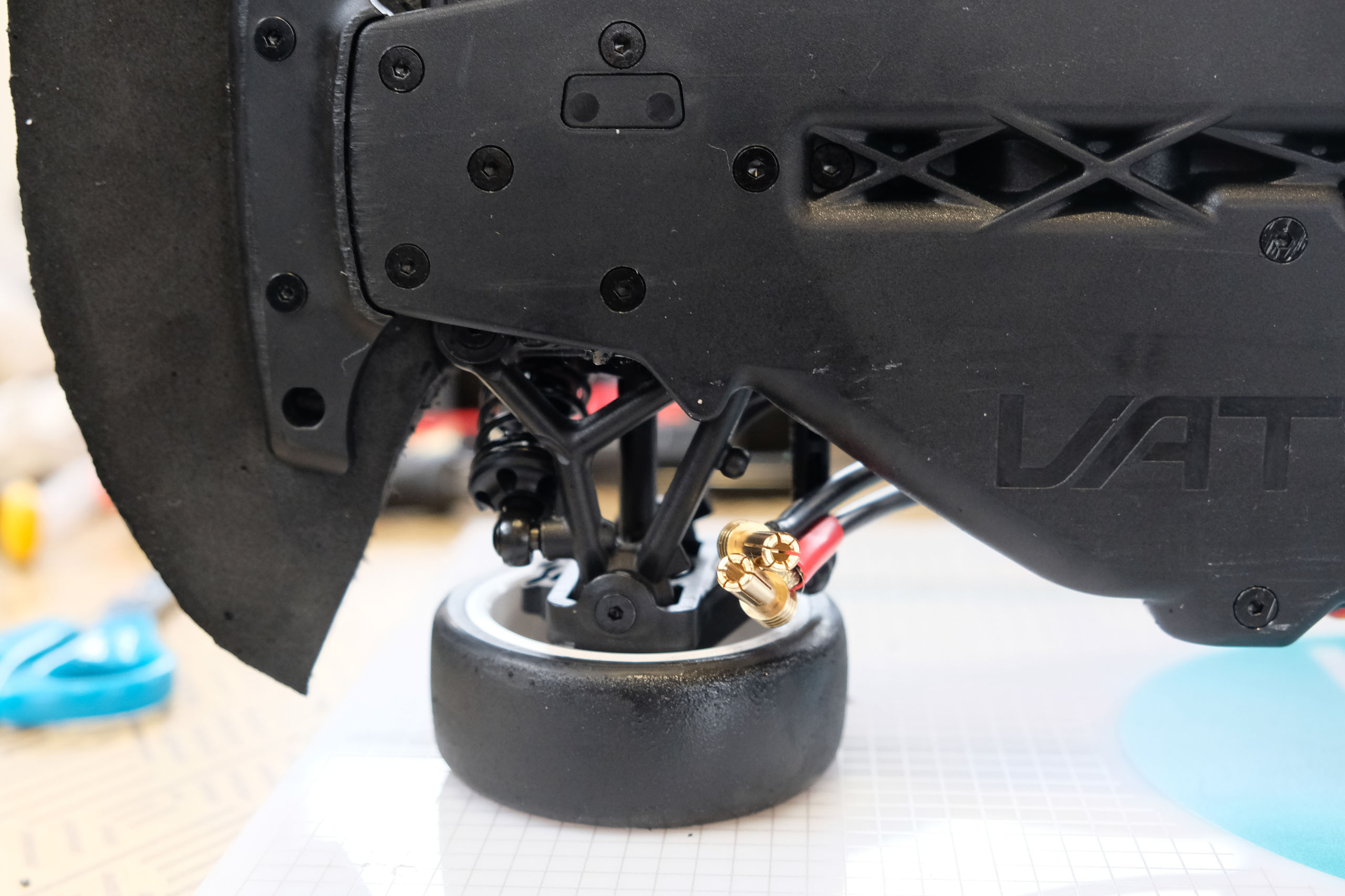
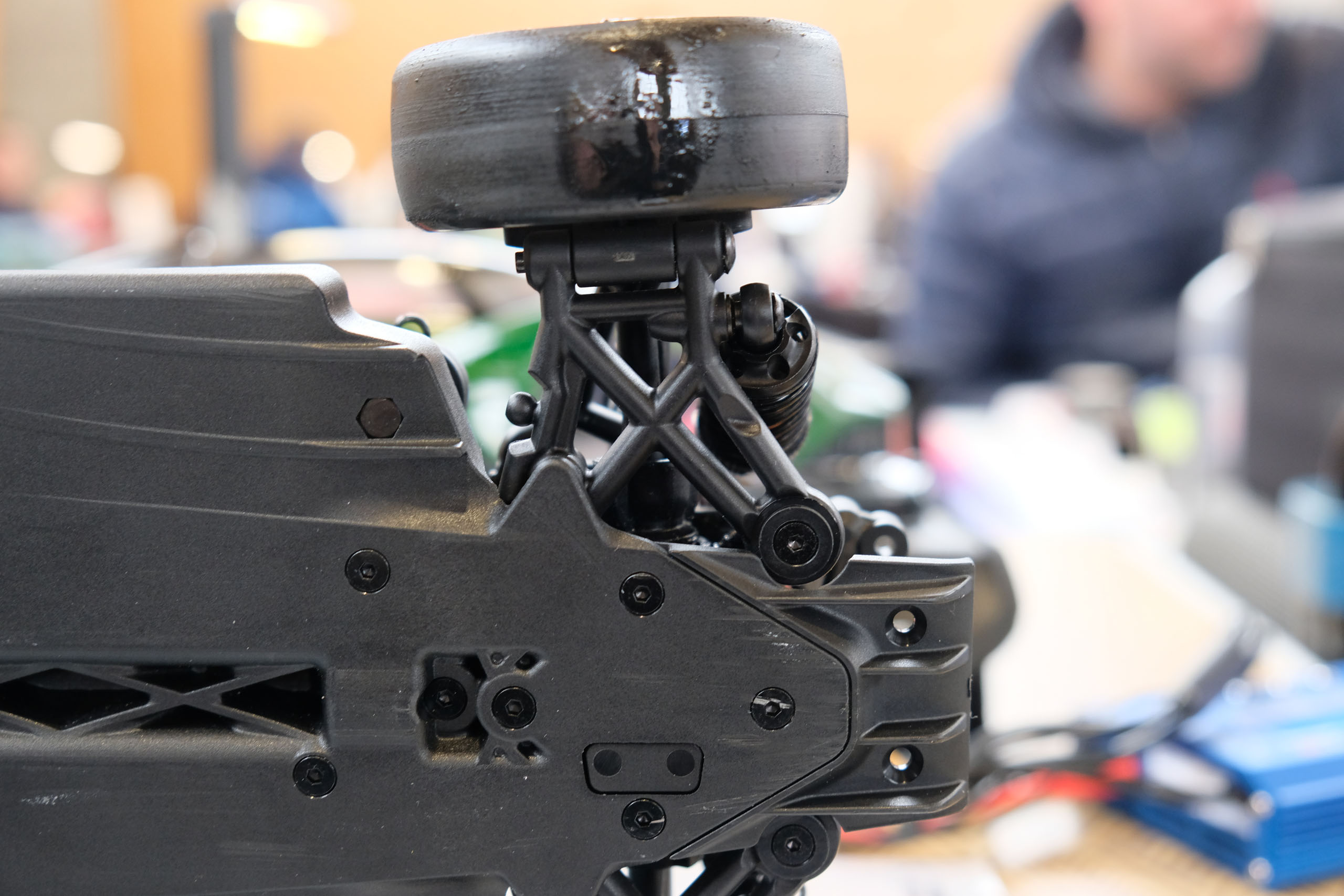
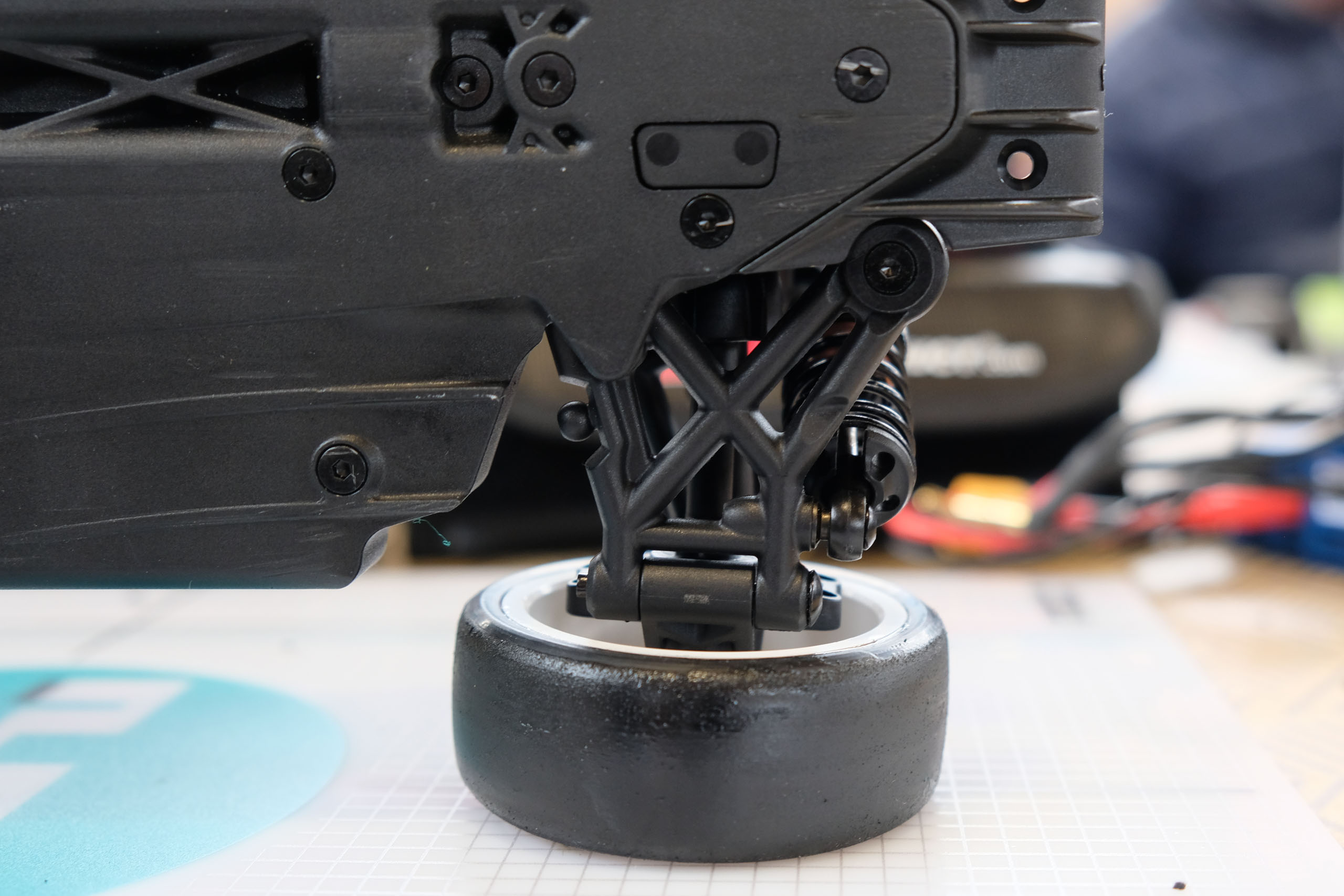
La Vaterra RC de Loïc Baboulaz.Ce pilote s'est essayé pour la première à la compétition lors de cette seconde manche des IndoorSeries avec une Vaterra RC 1/10° électrique, une auto normalement plus orientée loisir. Malgré cette prédestination, rien n'empêche cette auto de s'aventurer en compétition si le règlement le permet. Et c'est le cas de celui des IndoorSeries, peu contraignant et accessible. Quelques adaptations ont été faites ou seront faites pour adapter cette auto loisir au fort grip de la moquette type ETS:
La notice de cette auto montre qu'il est possible d'adapter le rapport de transmission de transmission en combinant les pignons et les couronnes optionnelles (qui semblent spécifiques à la marque malheureusement) de 4.13 à 9.33! Il y a largement de quoi faire donc. Les plus observateurs remarqueront le montage d'amortisseurs Big Bore de chez Yeah Racing, réputés pour le rapport qualité/prix sympathique, et l'adoption d'un moteur Ruddog Racing RP540 et du variateur RXS référence RP-0500 de la même marque, un variateur programmable (avec un boîtier dédié référence RP-0501) destiné à la compétition et qui présente sur le papier des spécifications alléchantes (processeur 32 bits, limite moteur 4.5T, BEC réglable, etc.). Malheureusement, pour le moment, sur le site du constructeur, il n'y a que des fiches de réglages destinées aux tous-terrains 1/10° électriques. Cette Vaterra s'est montré saine et fiable lors de ce weekend de course. Le dessin des pièces montre d'ailleurs une conception réfléchie et une fabrication soignée, bien loin de certains produits de loisir bâclés que l'on rencontre trop souvent. Certes, il lui est difficile de rivaliser avec des autos bien plus orientées compétition, mais avec un peu de mise au point et d'entrainement, certaines autos plastiques pourraient en surprendre plus d'un! Pour revenir à la marque Vaterra RC, il semblerait que celle-ci se soit effacée au profit de Losi, qui appartient également à la constellation Horizon Hobby, Losi ayant repris sous son nom une partie du programme Vaterra RC. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
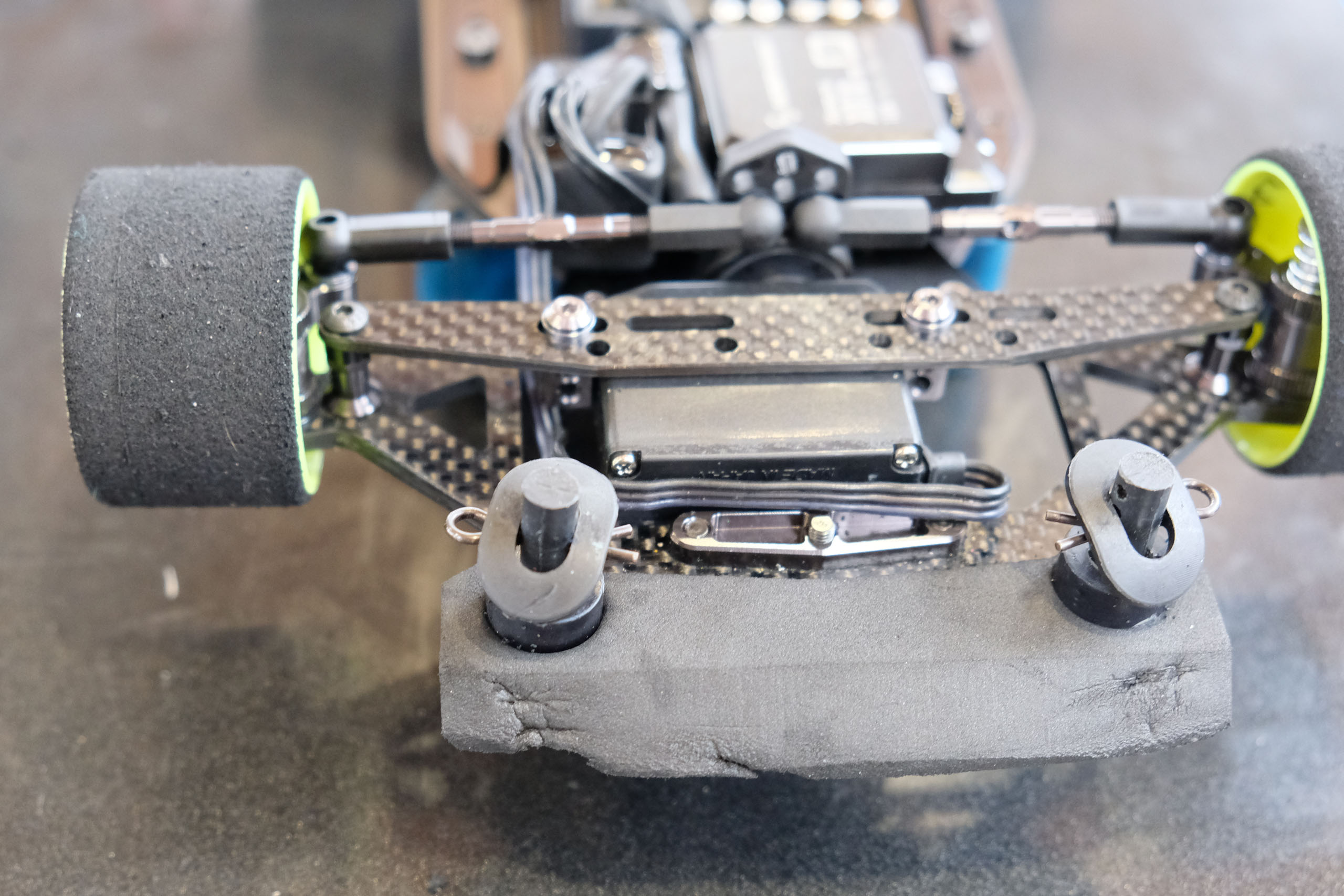
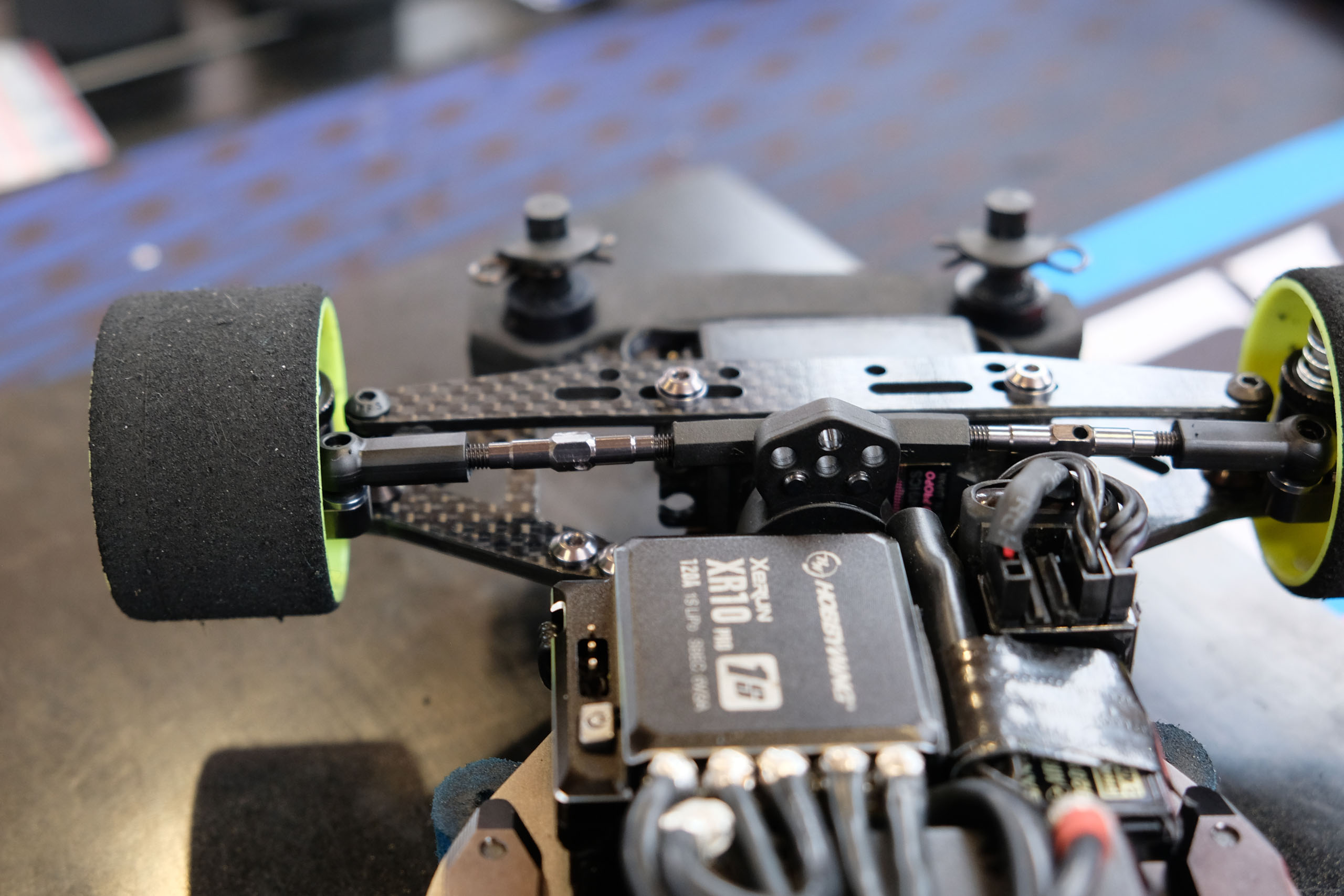
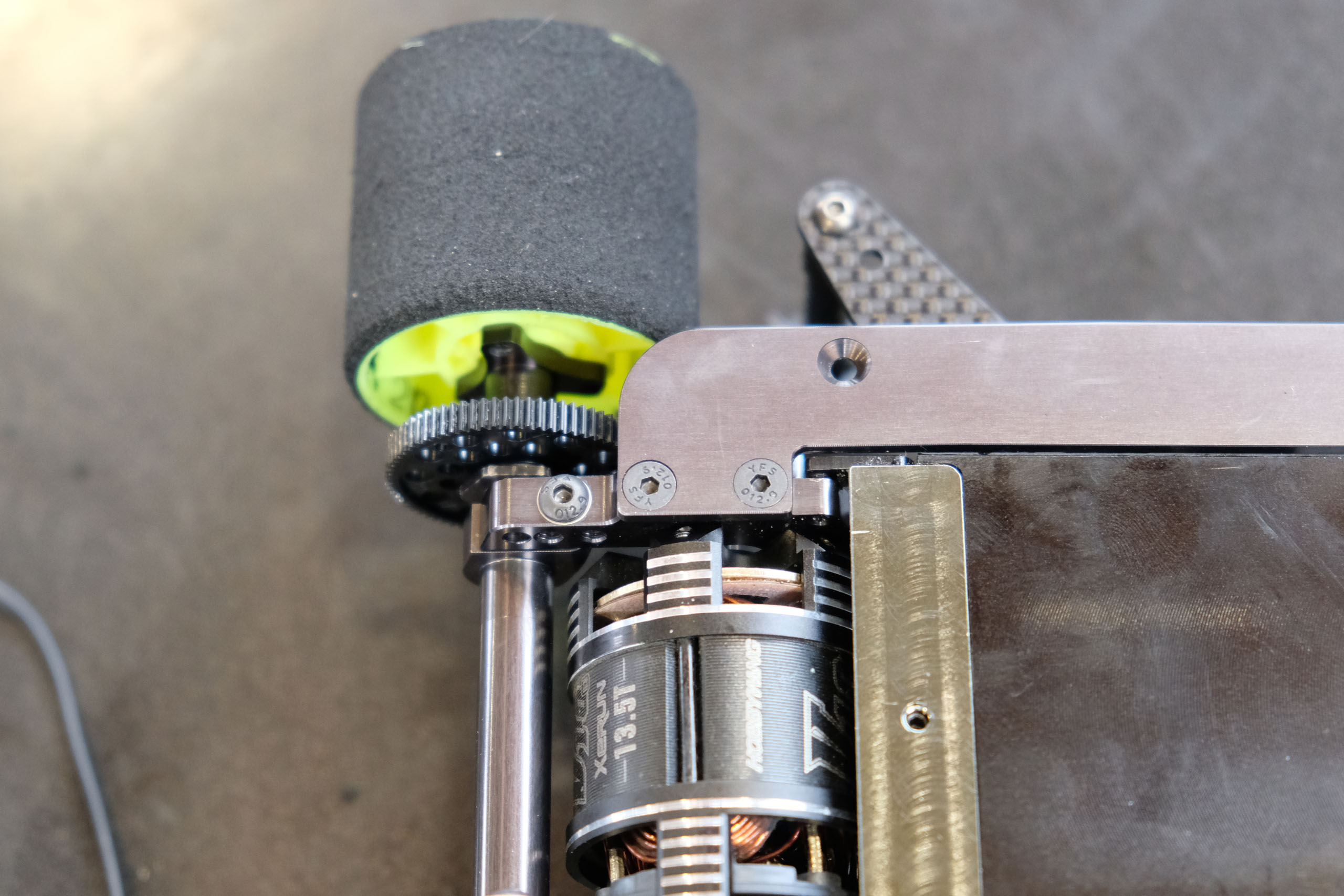
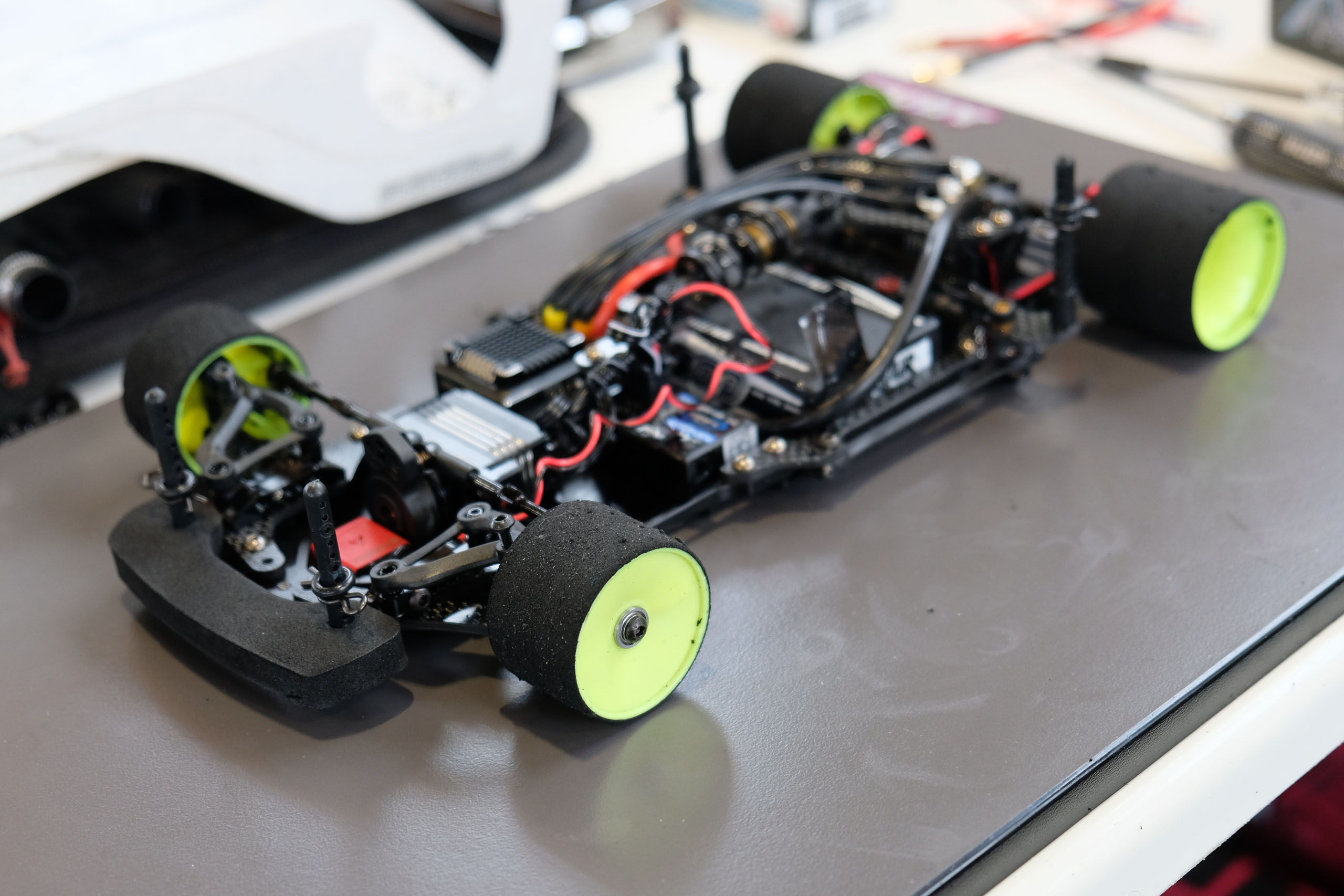
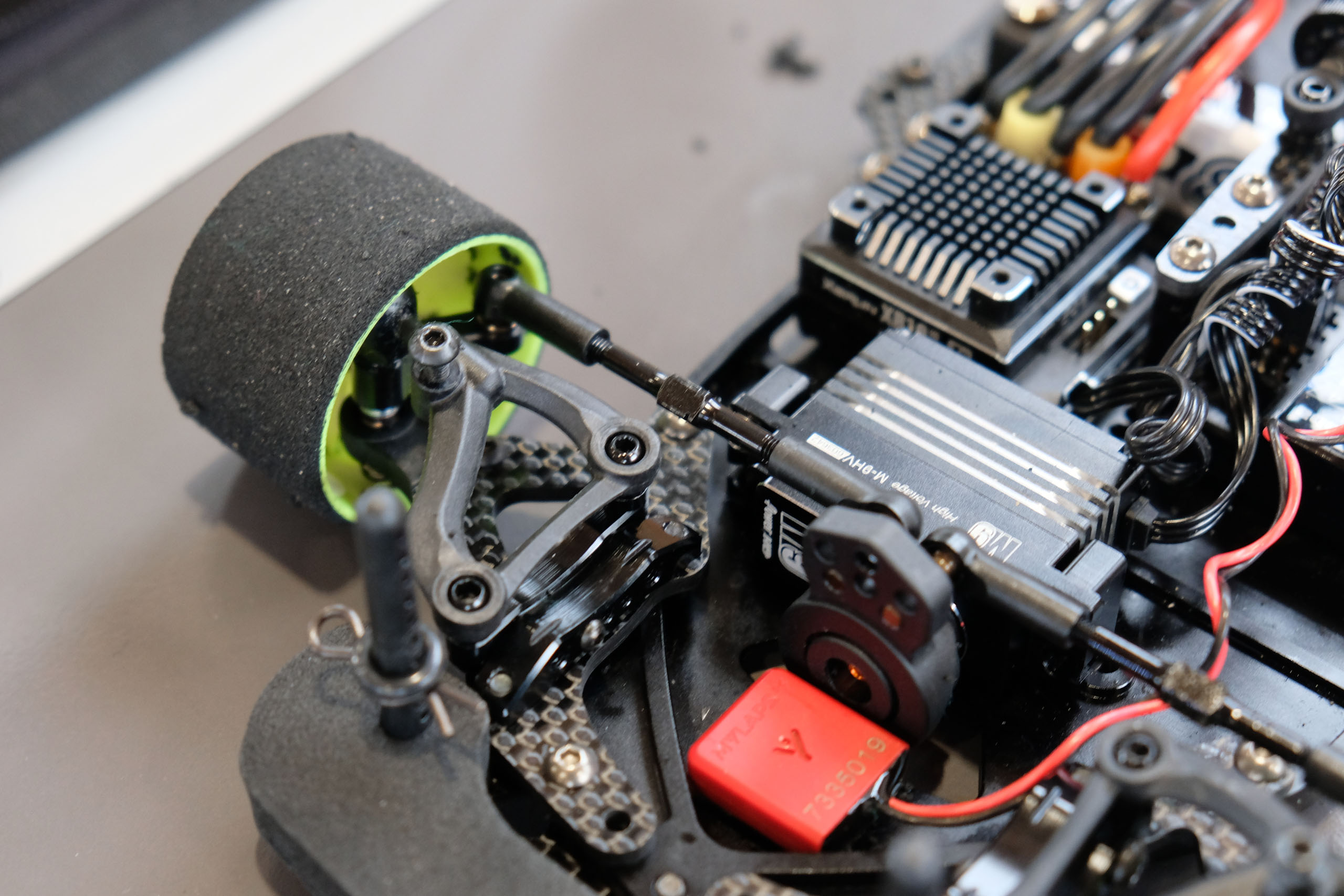
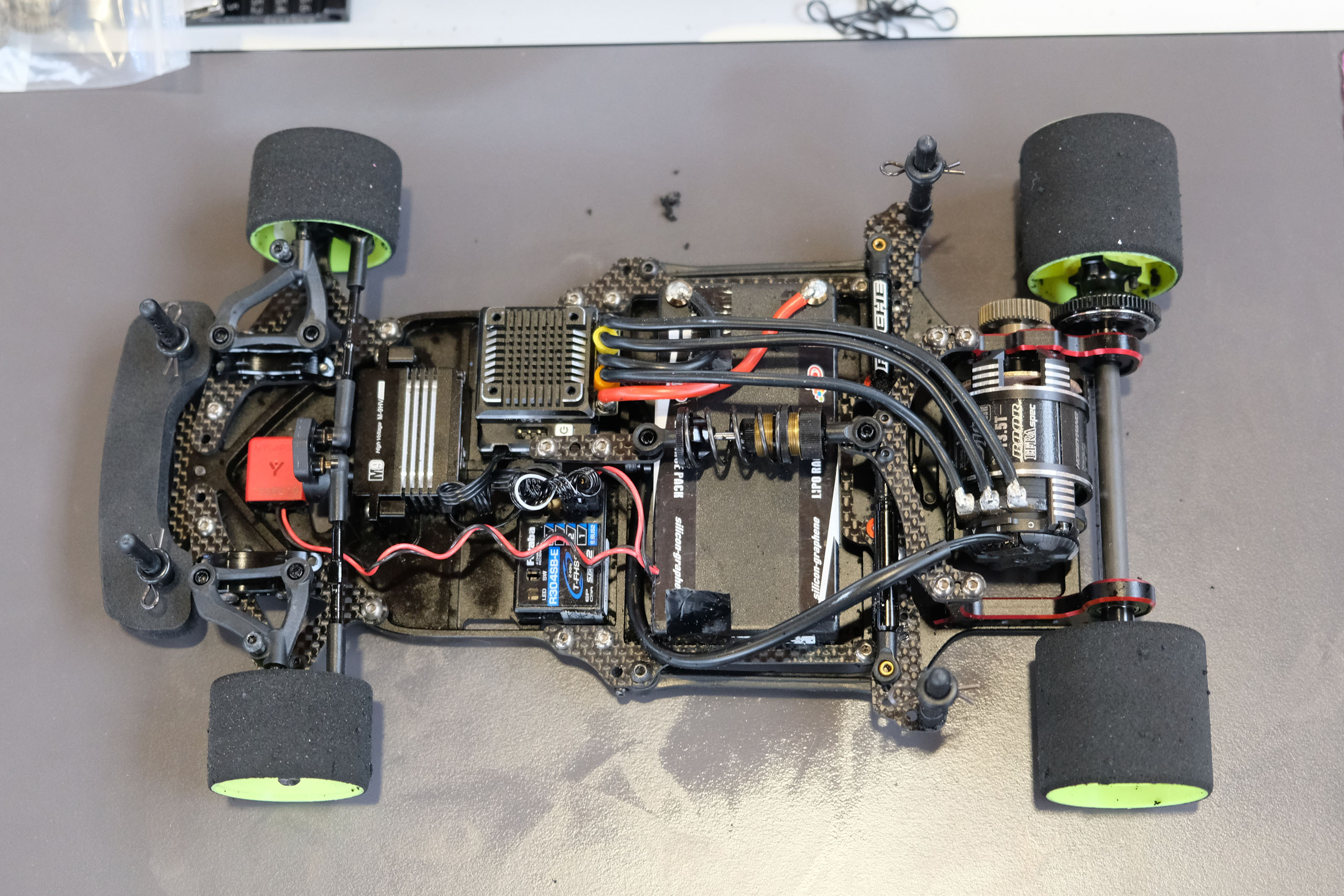
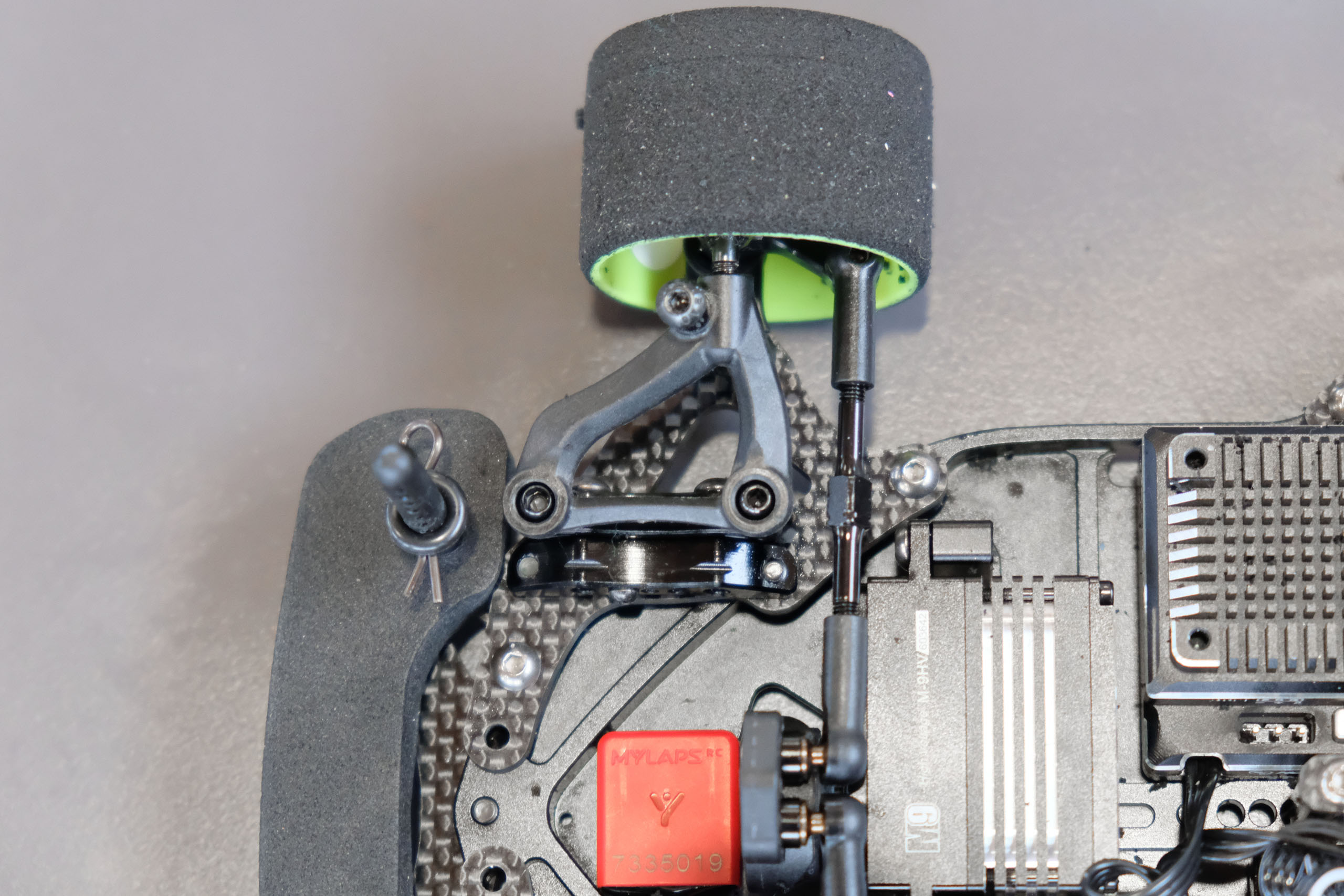
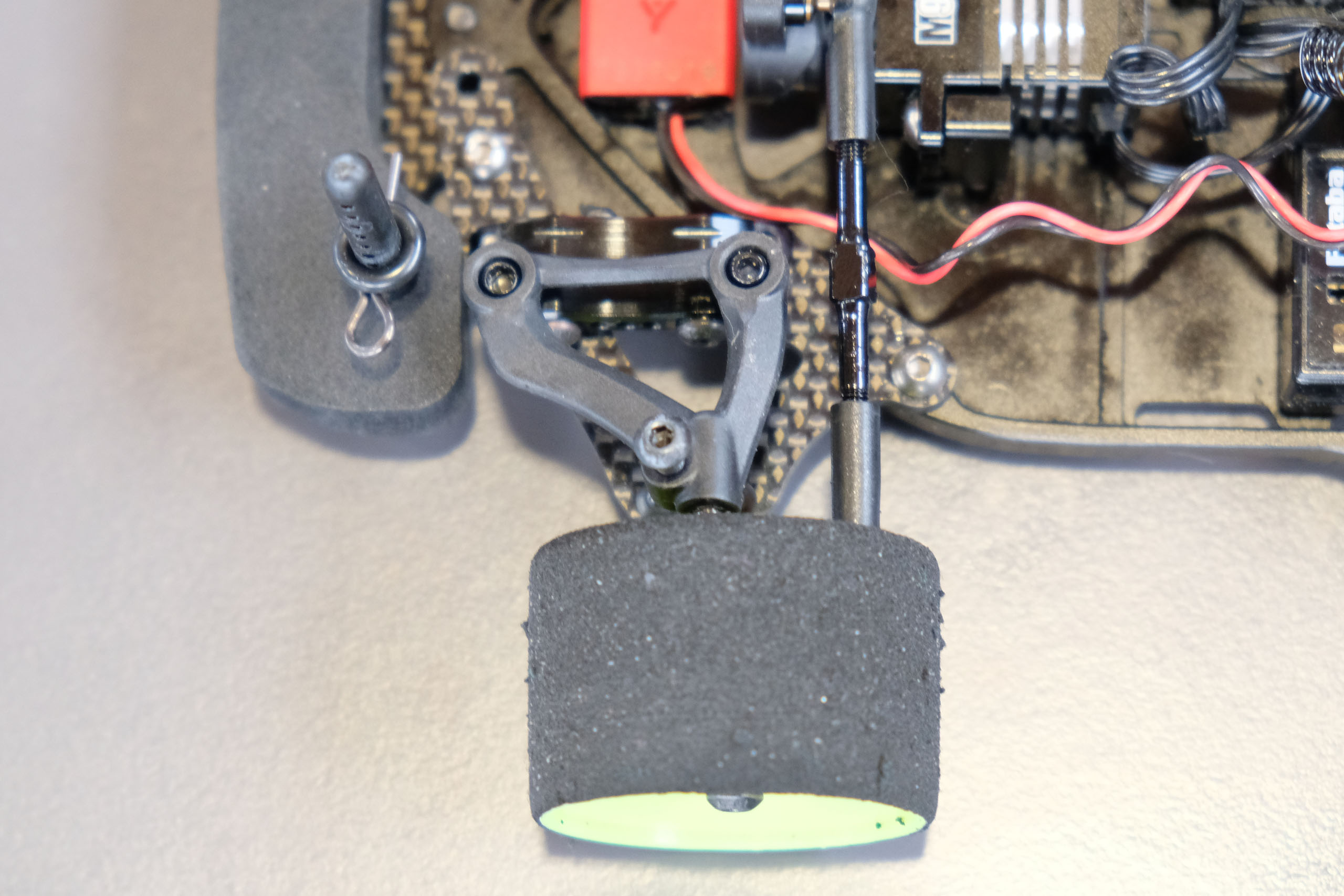
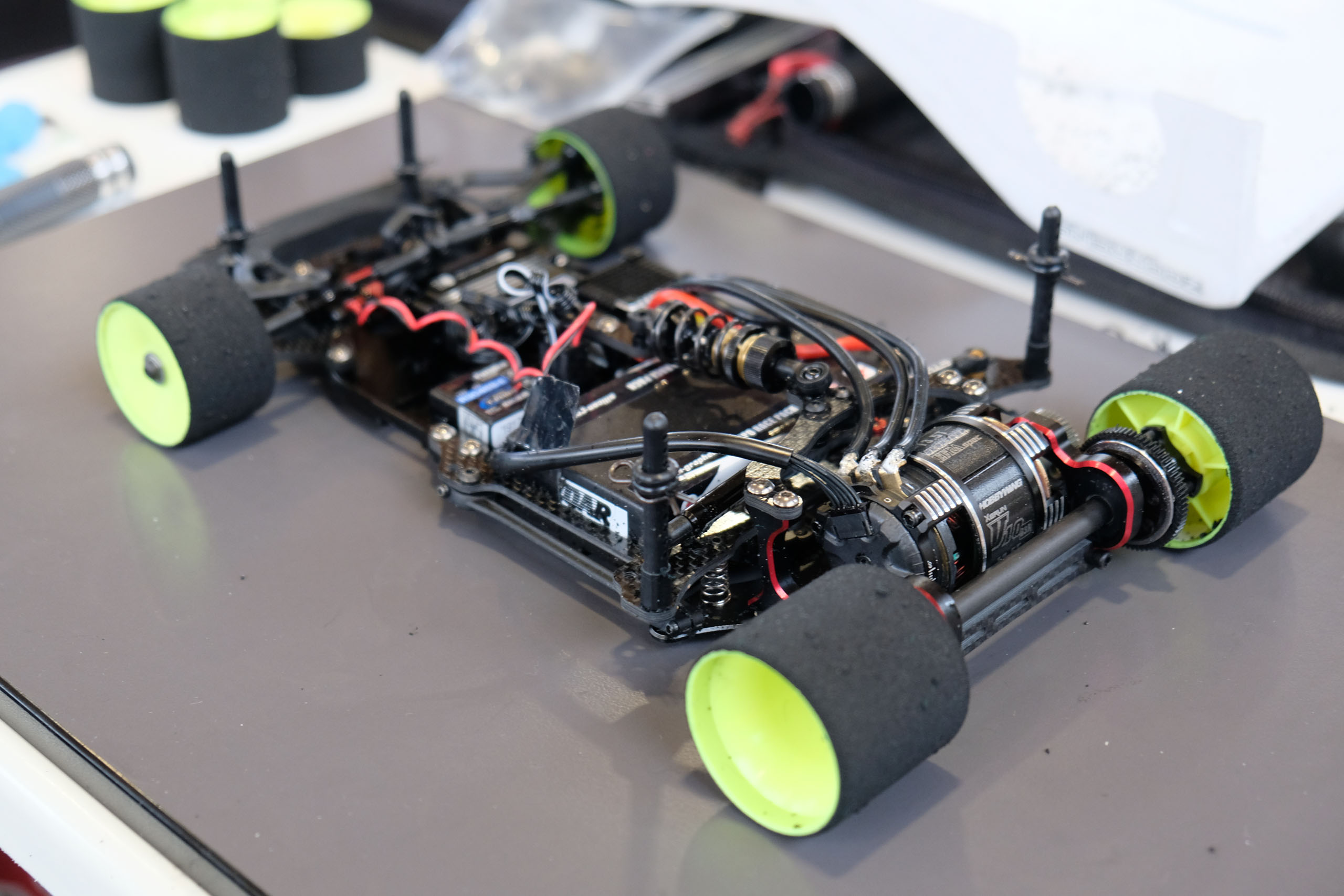
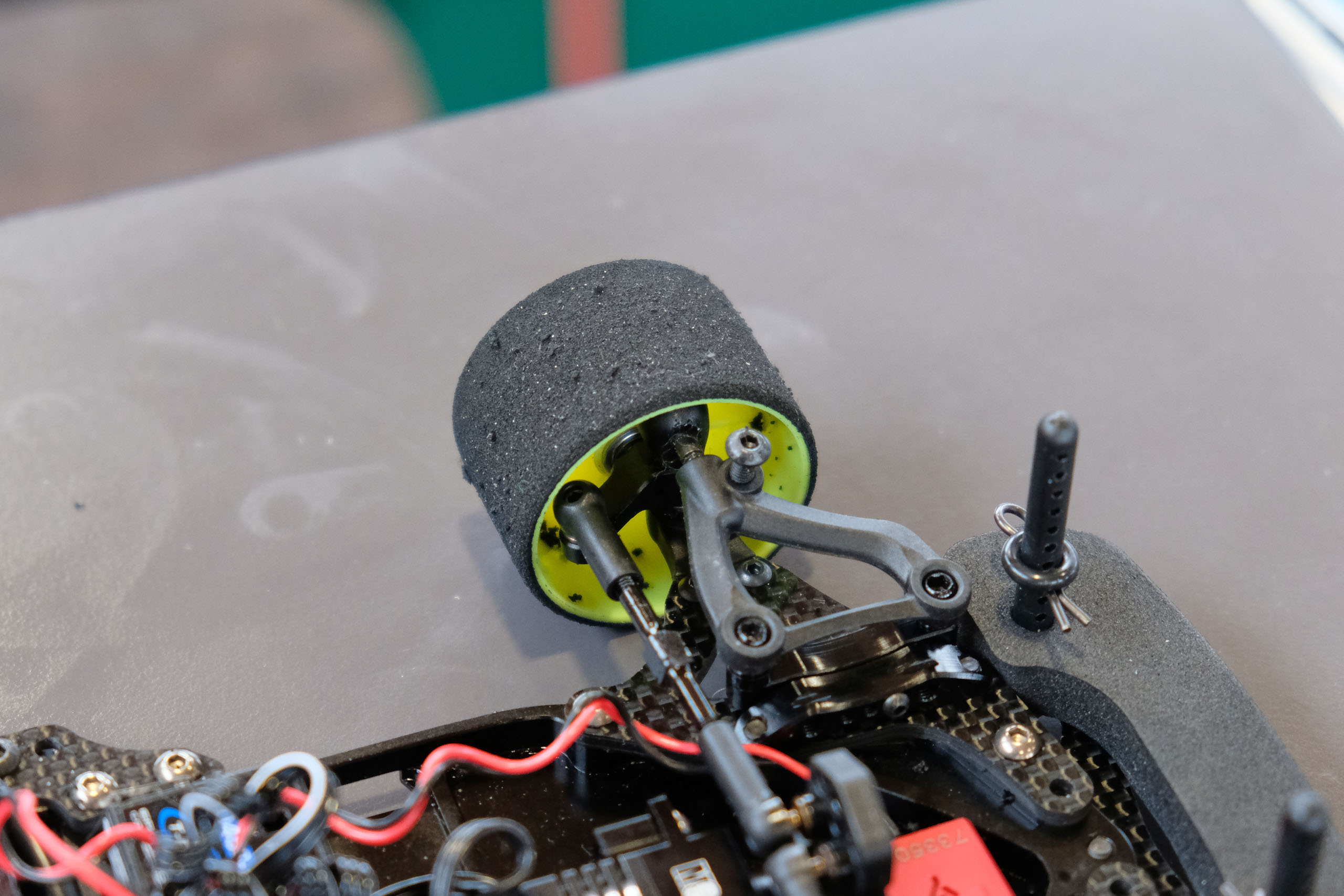
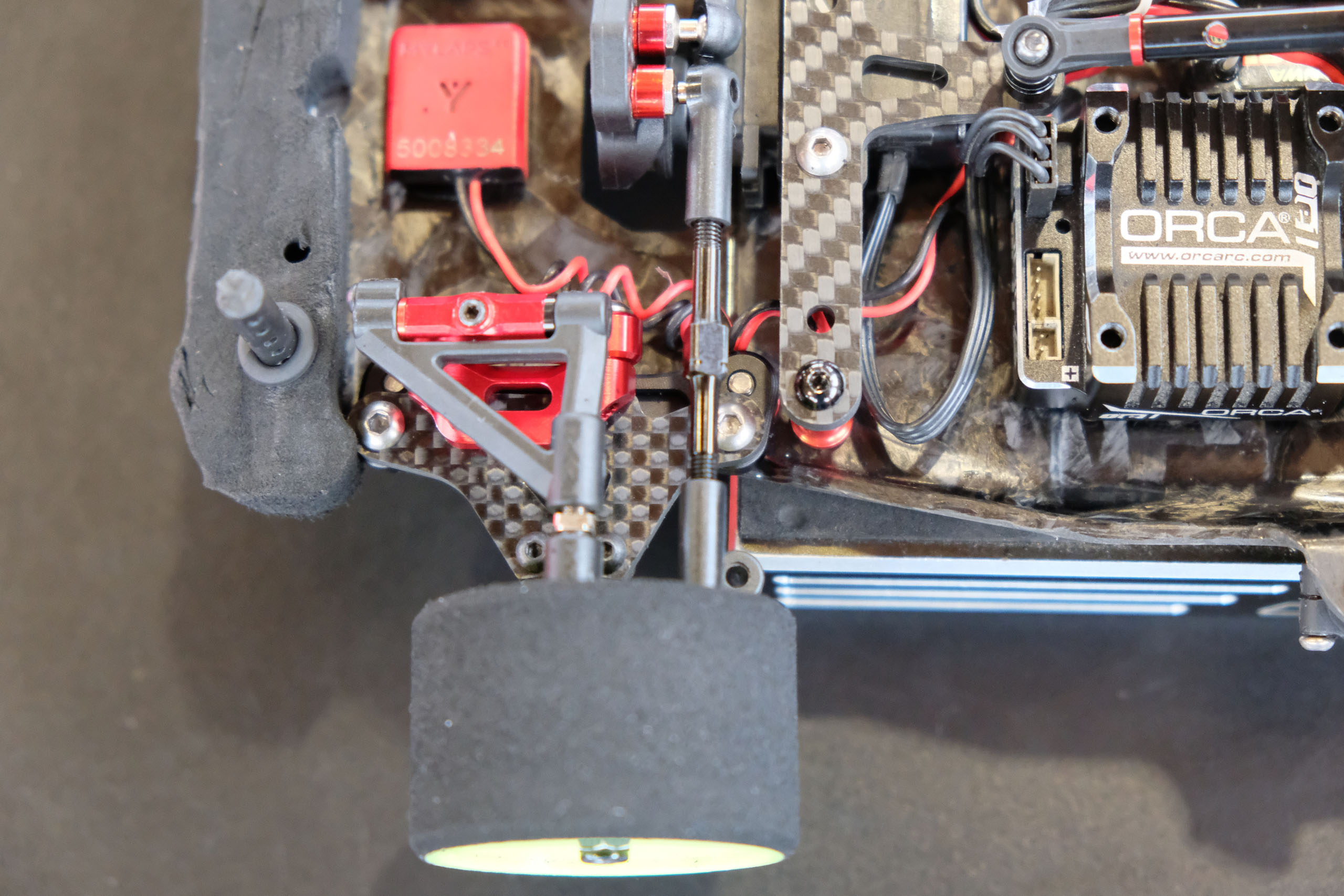
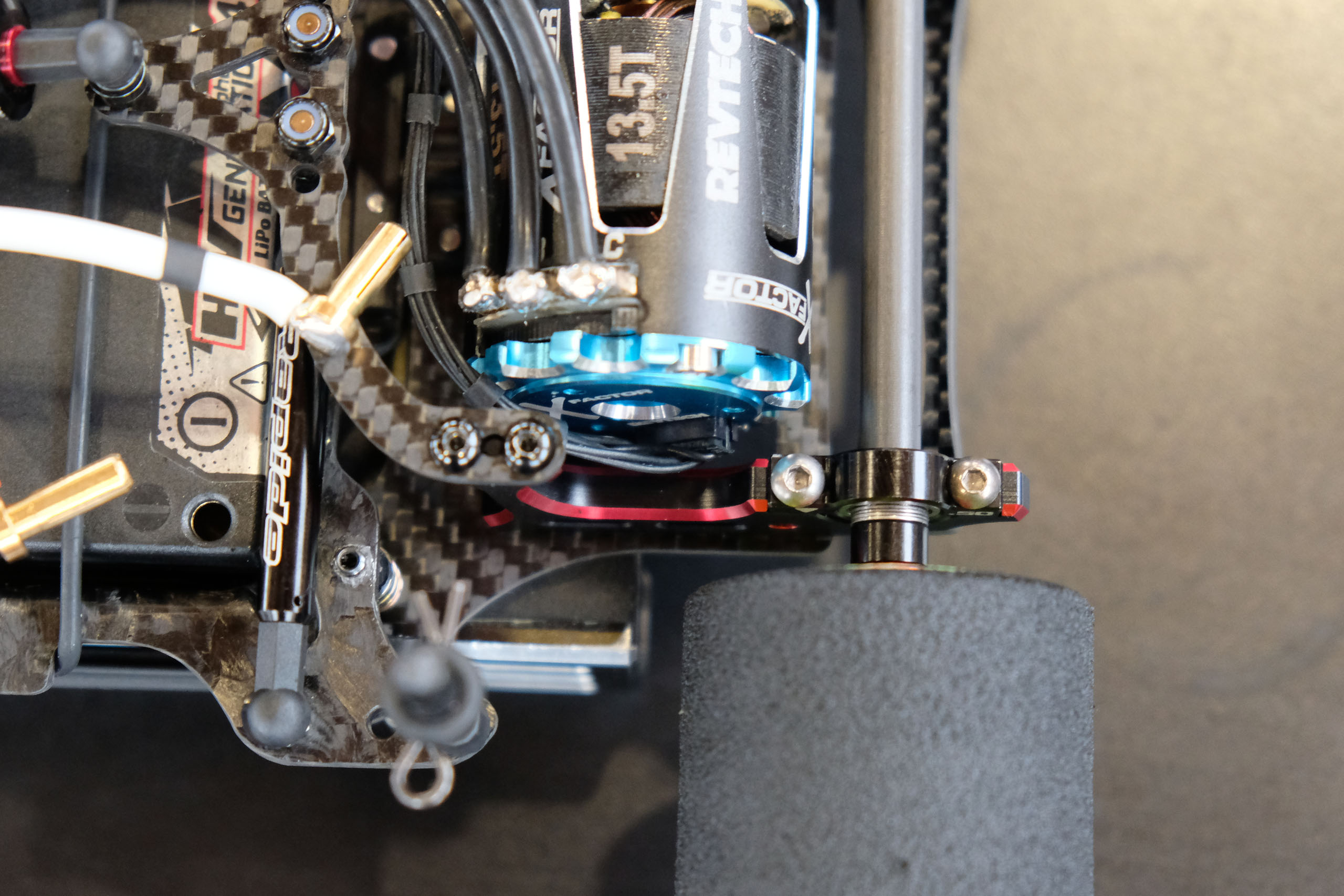
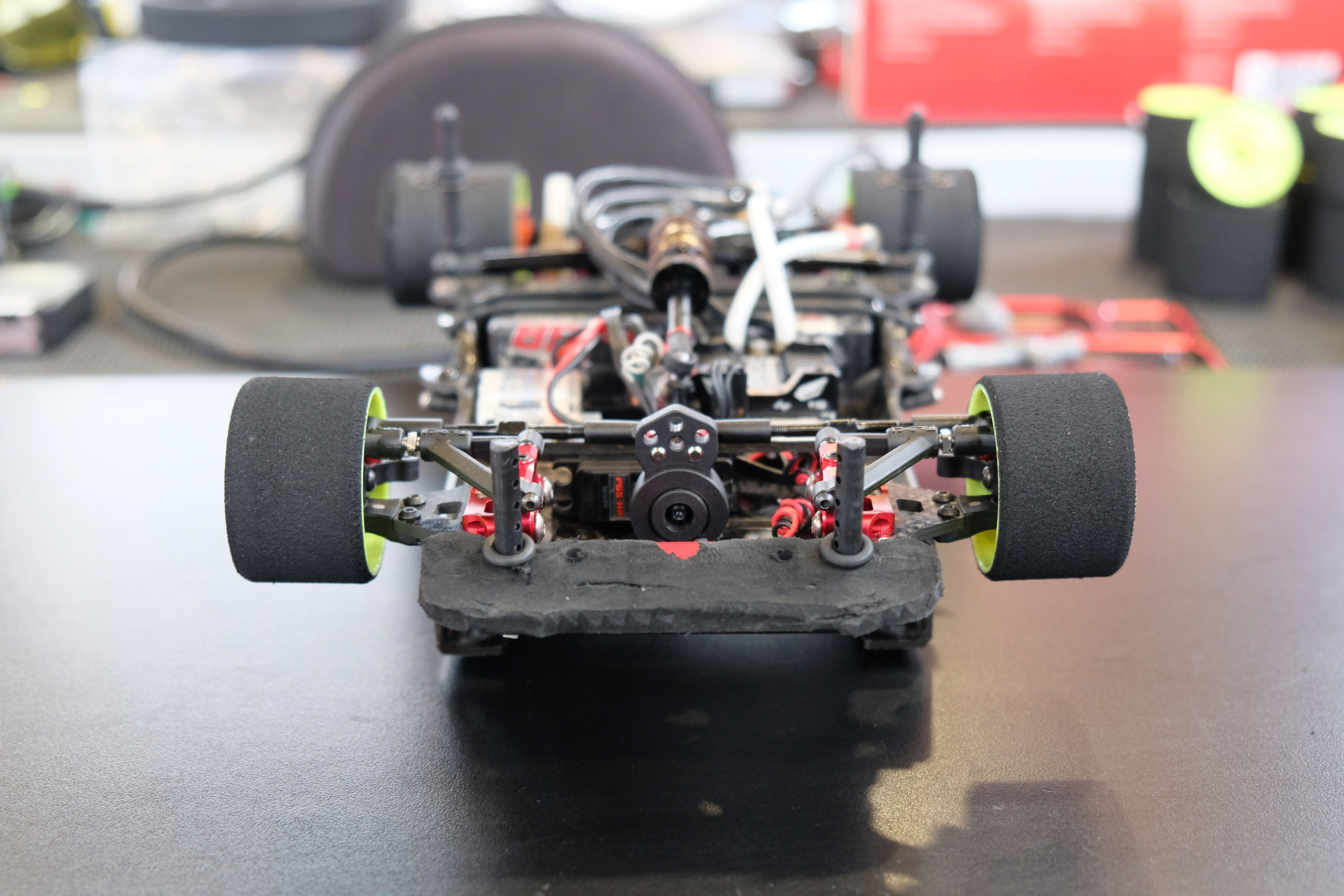
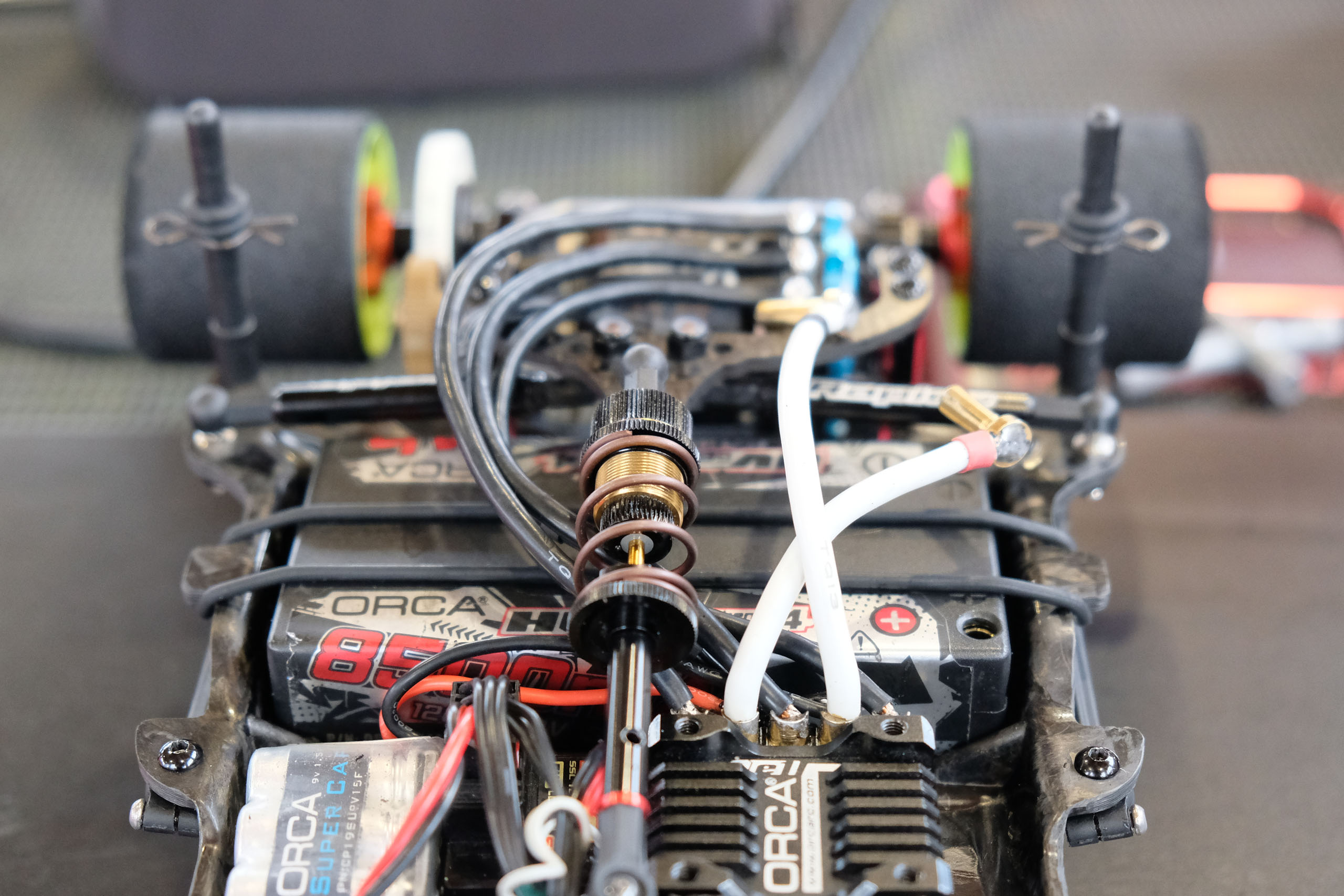
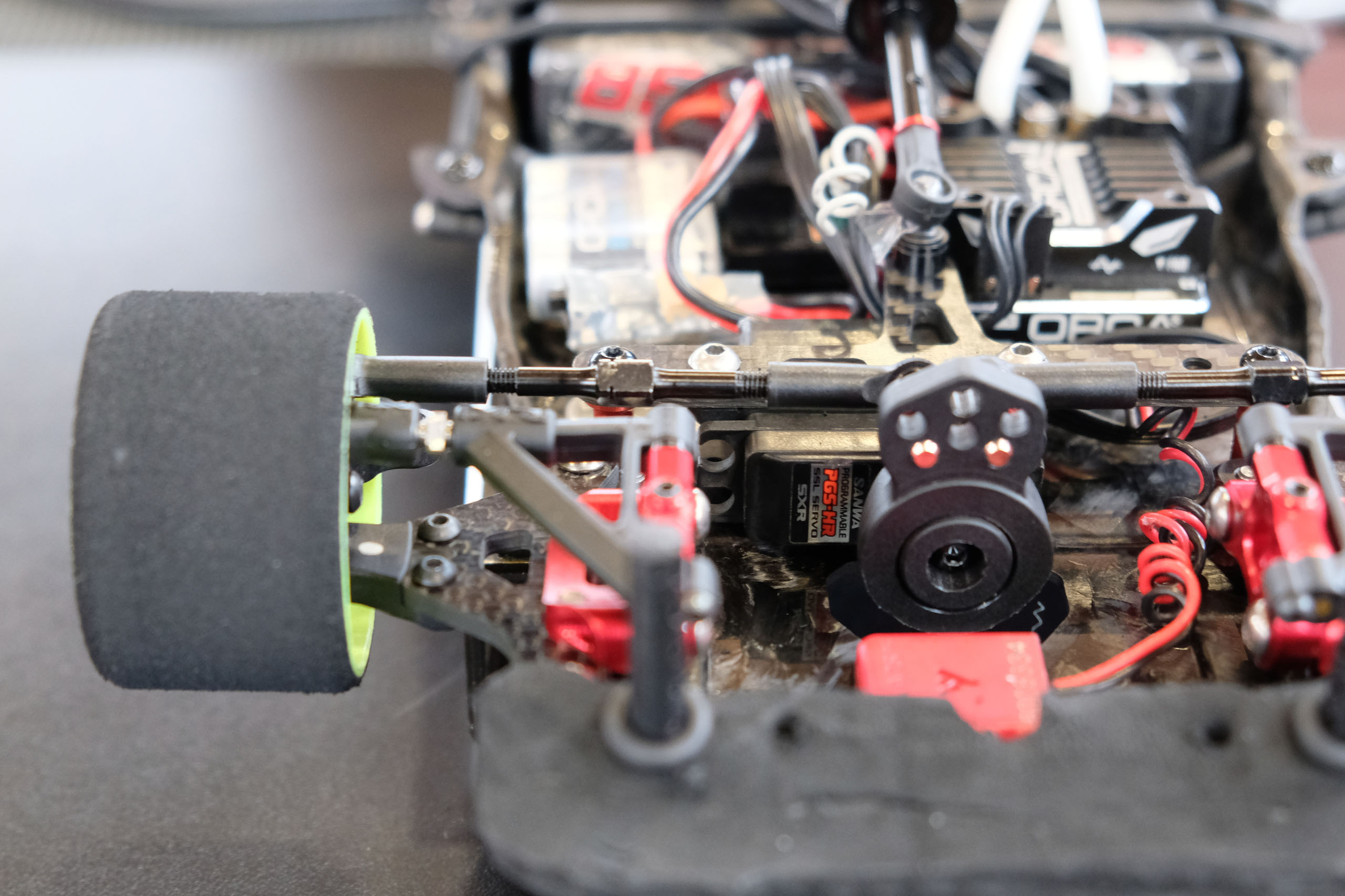
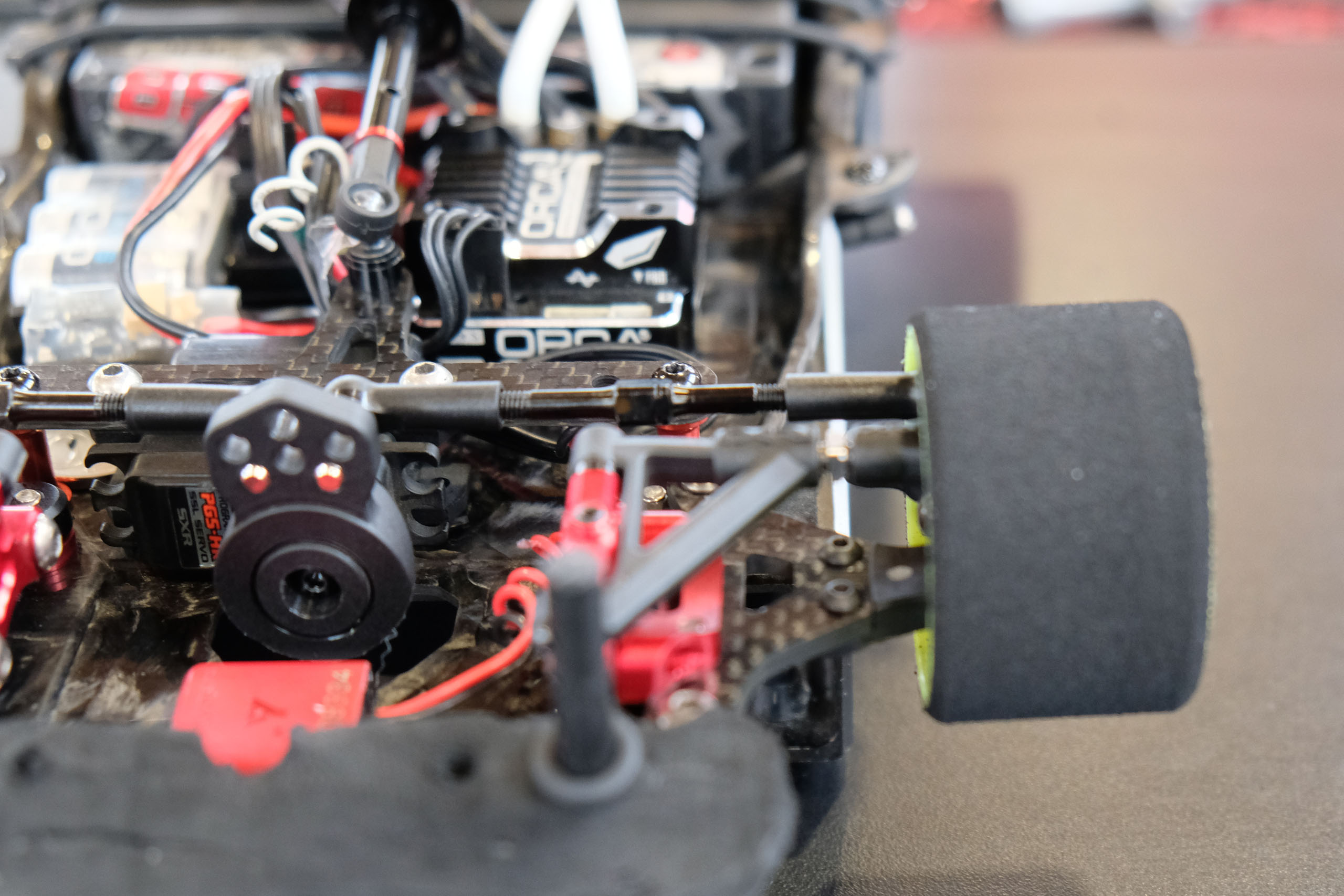
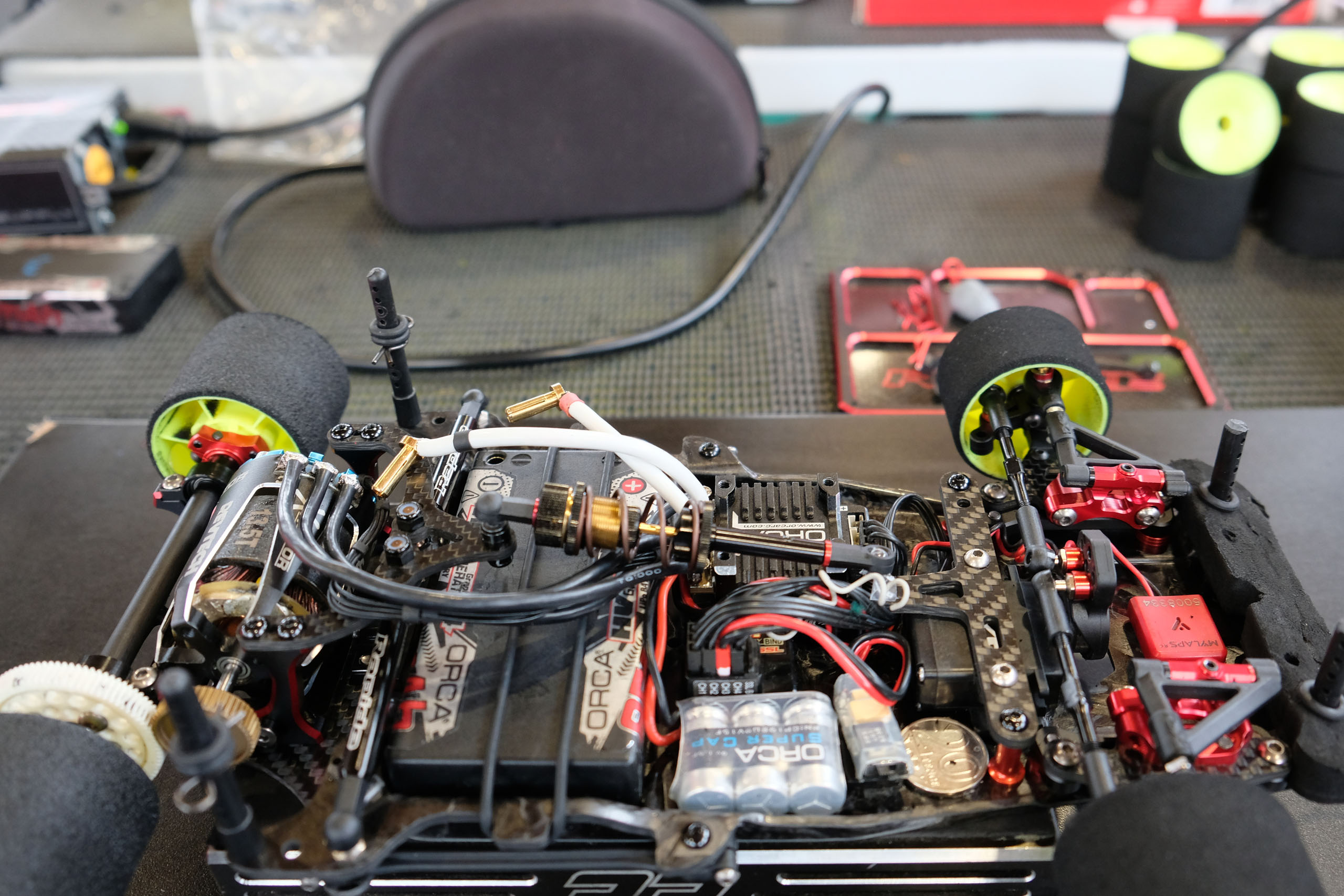
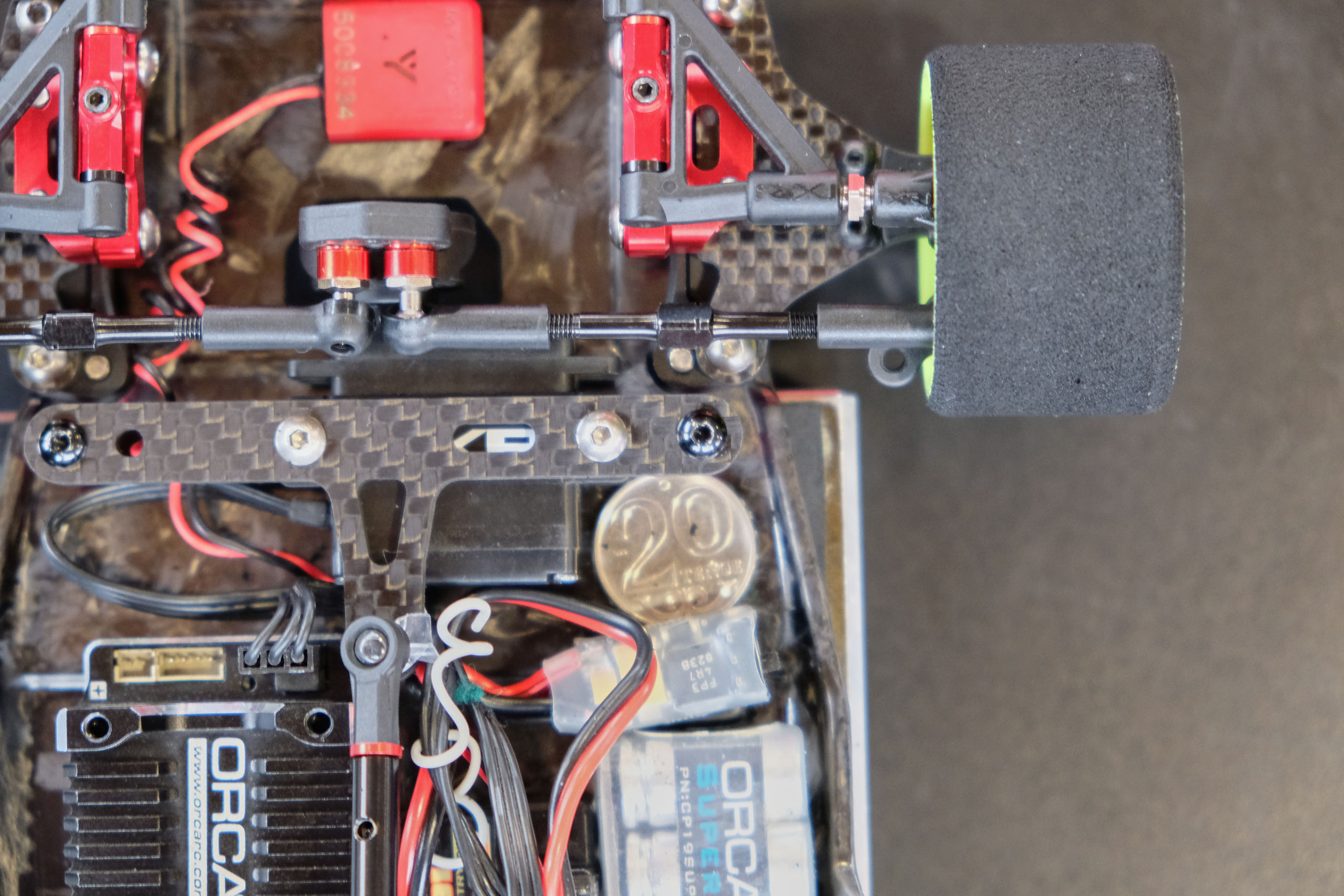
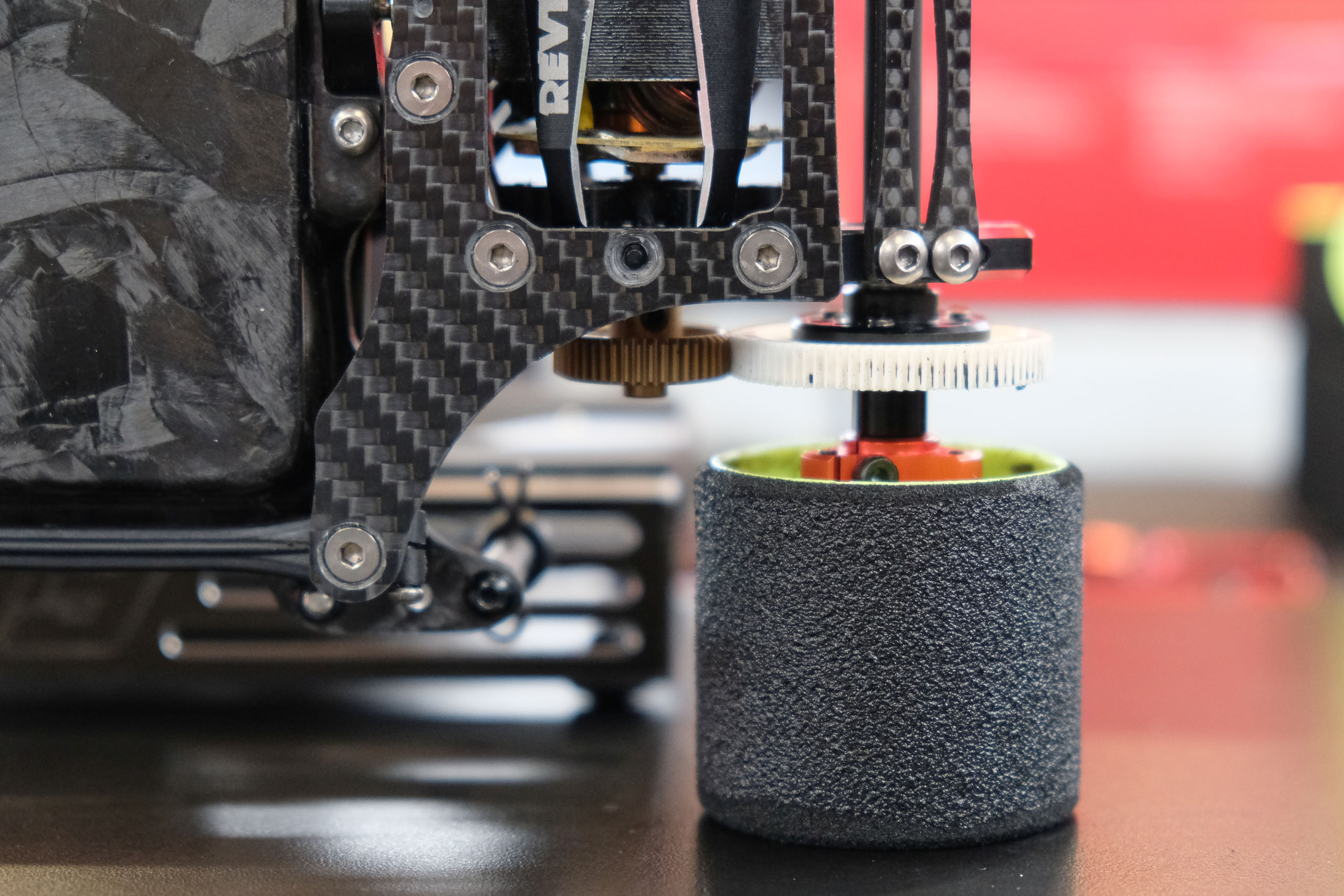
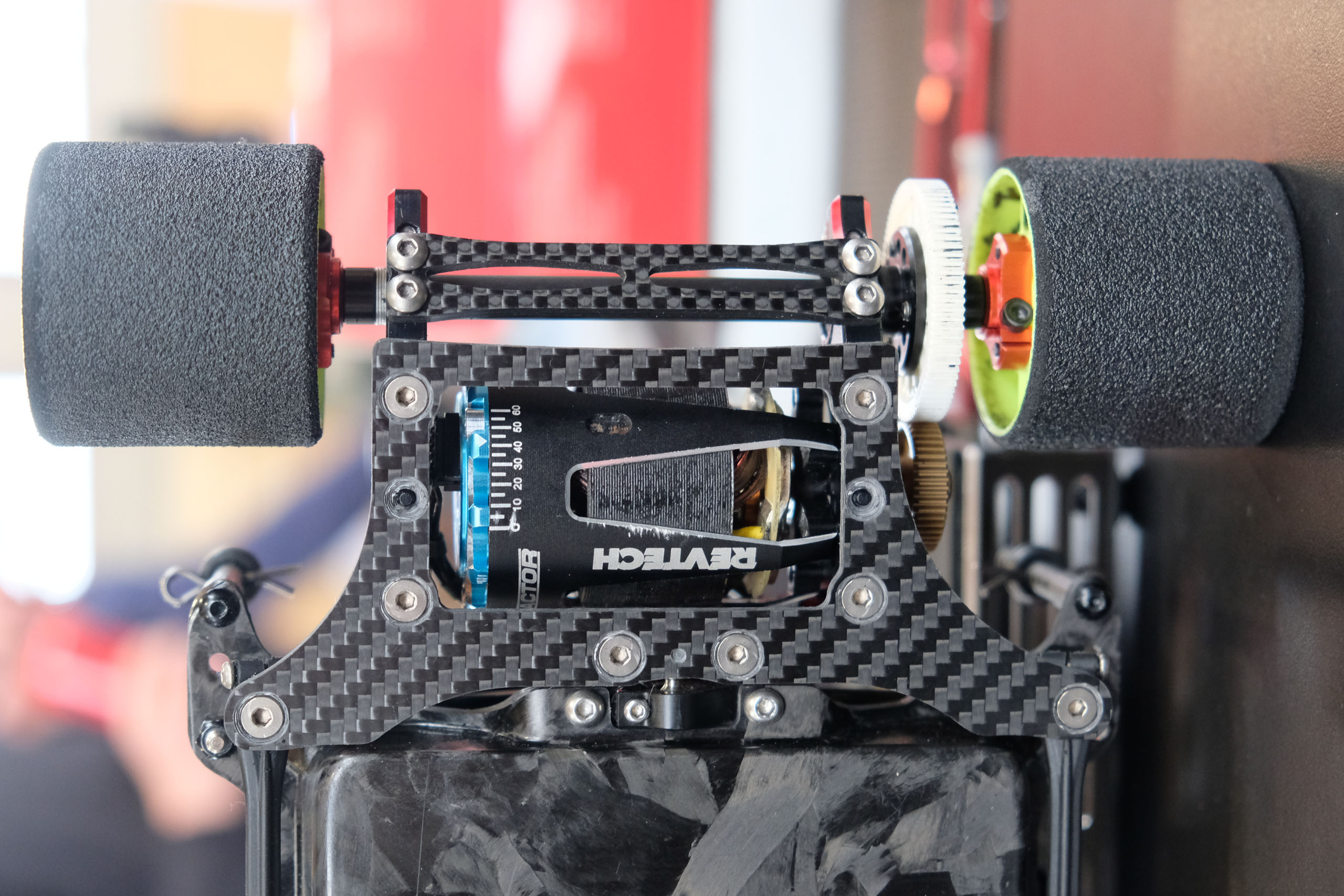
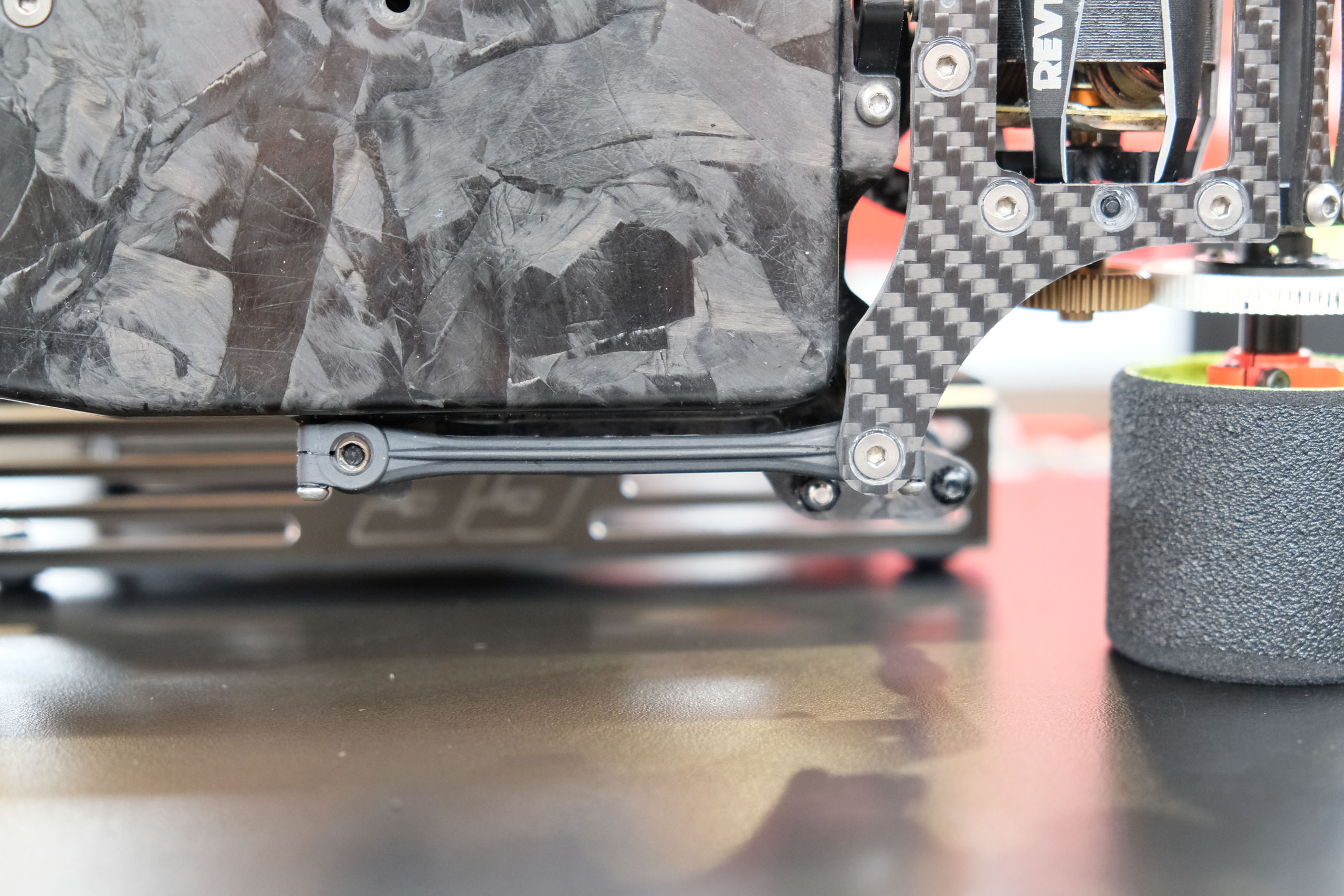
Technique Pan Car 1/12°.La Awesomatix A12 d'Arnaud Buffat.La Awesomatix A12 d'Arnaud Buffat, vainqueur de la journée en catégorie Piste 1/12°, était sensiblement de boîte, sans aucune option marquante visible. On remarquera juste le poids à l'arrière du côté gauche pour équilibrer le pod et le parechoc recoupé pour éviter de planter l'avant dans les appuis. Ses réglages sont ceux de boîte, hormis les ressorts latéraux implantés sur la position extérieure et la position des vis sur les bras de rigidification latéraux. La partie électronique est classique, mais éprouvée: moteur XRun V10 G3 13.5T et contrôleur XR10 Pro 1S de chez Hobbywing, et batterie LiHV 1S 8200mAh de chez IP-Inllect. A noter que maintenant, Awesomatix livre sur ses A12 des corps-lests pour les amortisseurs rotatifs arrière non plus en acier magnétique, mais en laiton. Le champ magnétique du moteur ne s'en portera que mieux ainsi! |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
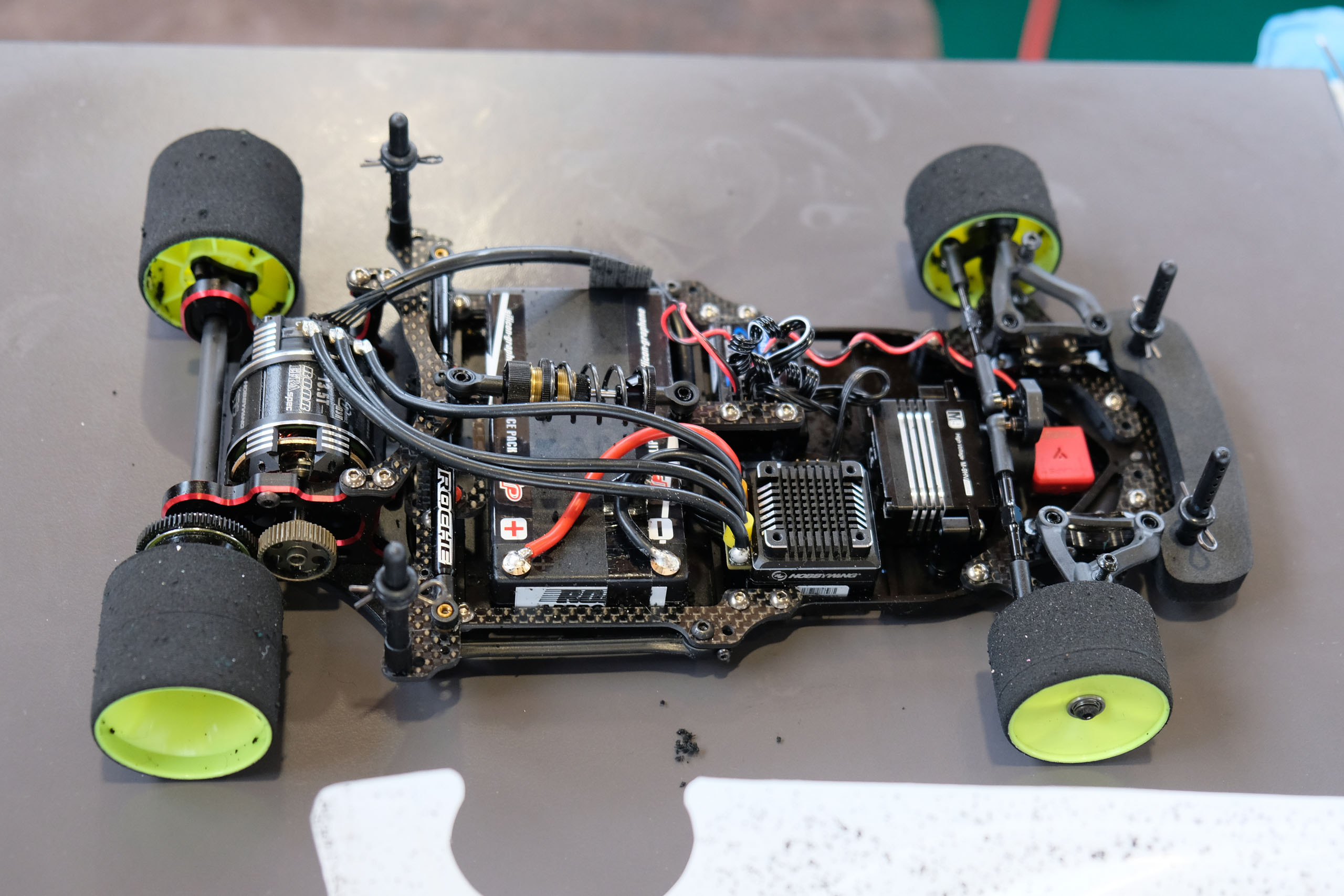
La Roche P12 Evo2 de Michael Gilliand.La dernière piste 1/12° électrique de la marque Roche, annoncée début novembre 2021, est maintenant disponible commercialement. Ce qui attire l'oeil en premier est l'impressionnant châssis en aluminium, non pas sous forme de plaque découpée comme habituellement, mais usiné à partir d'un bloc, comme la Awesomatix A12, bien que le dessin de celui de la P12 Evo soit radicalement différent. Le logement de la batterie permet d'en régler la position. L'avant du châssis est légèrement surélevé pour éviter de frotter dans les appuis. Michael Gilliand roulait semble-t-il avec la seule Roche P12 Evo 2 du plateau, avec laquelle il a fini sixième de la finale A. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
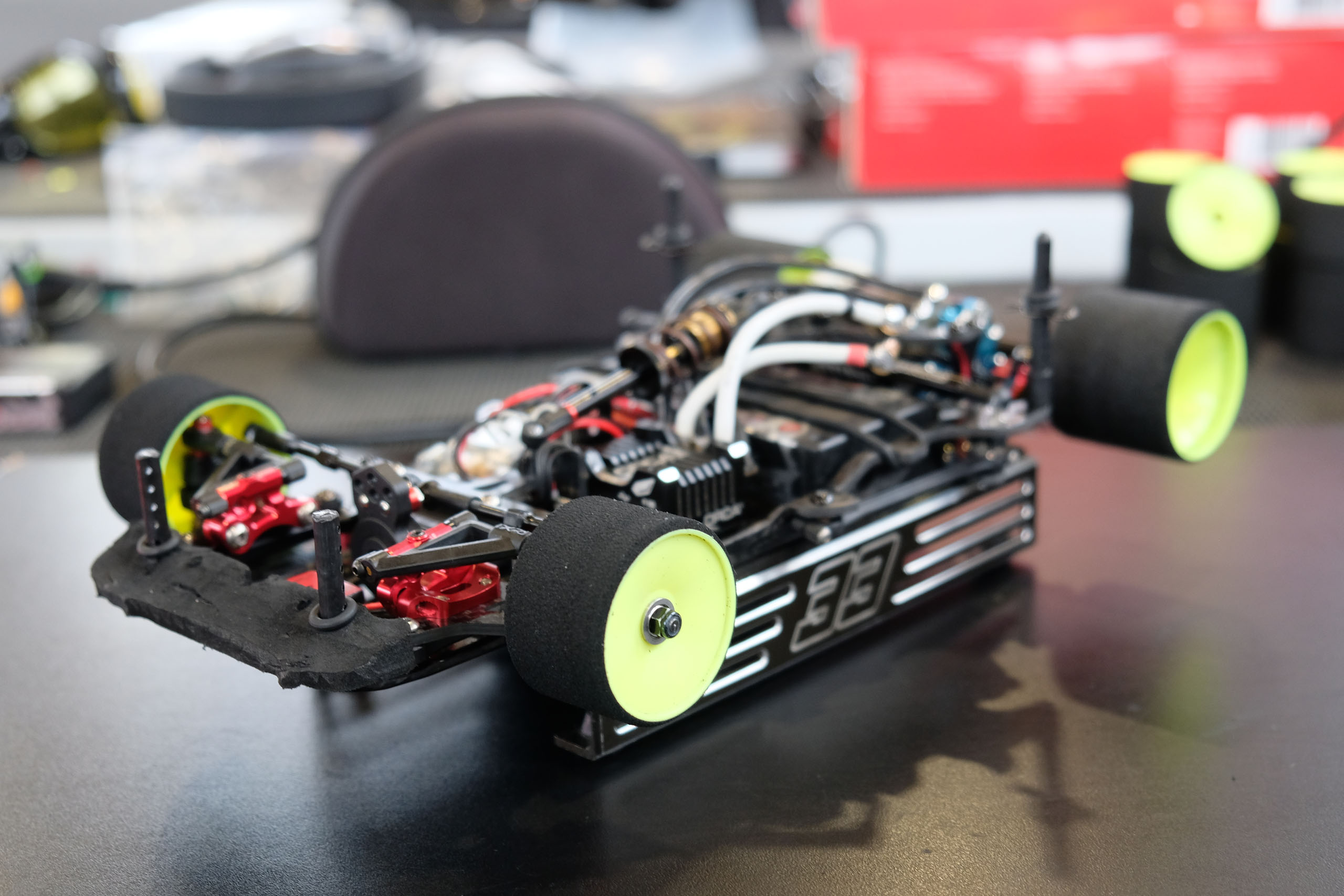
La BlackArt RC Racing / Project-GodSpeed sur base de Roche P12 Evo de Nicolas Albina.Nicolas Albina, qui a fini cinquième de la finale A, roulait ici avec, sauf erreur, le kit de conversion Project-GodSpeed équipé du fameux châssis en carbone moulé BlackArt RC Racing et de pièces GodSpeed (pivot central flottant, support de servo flottant, etc.), et sur lequel sont montés des trains avant et arrière de Roche P12 Evo. |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
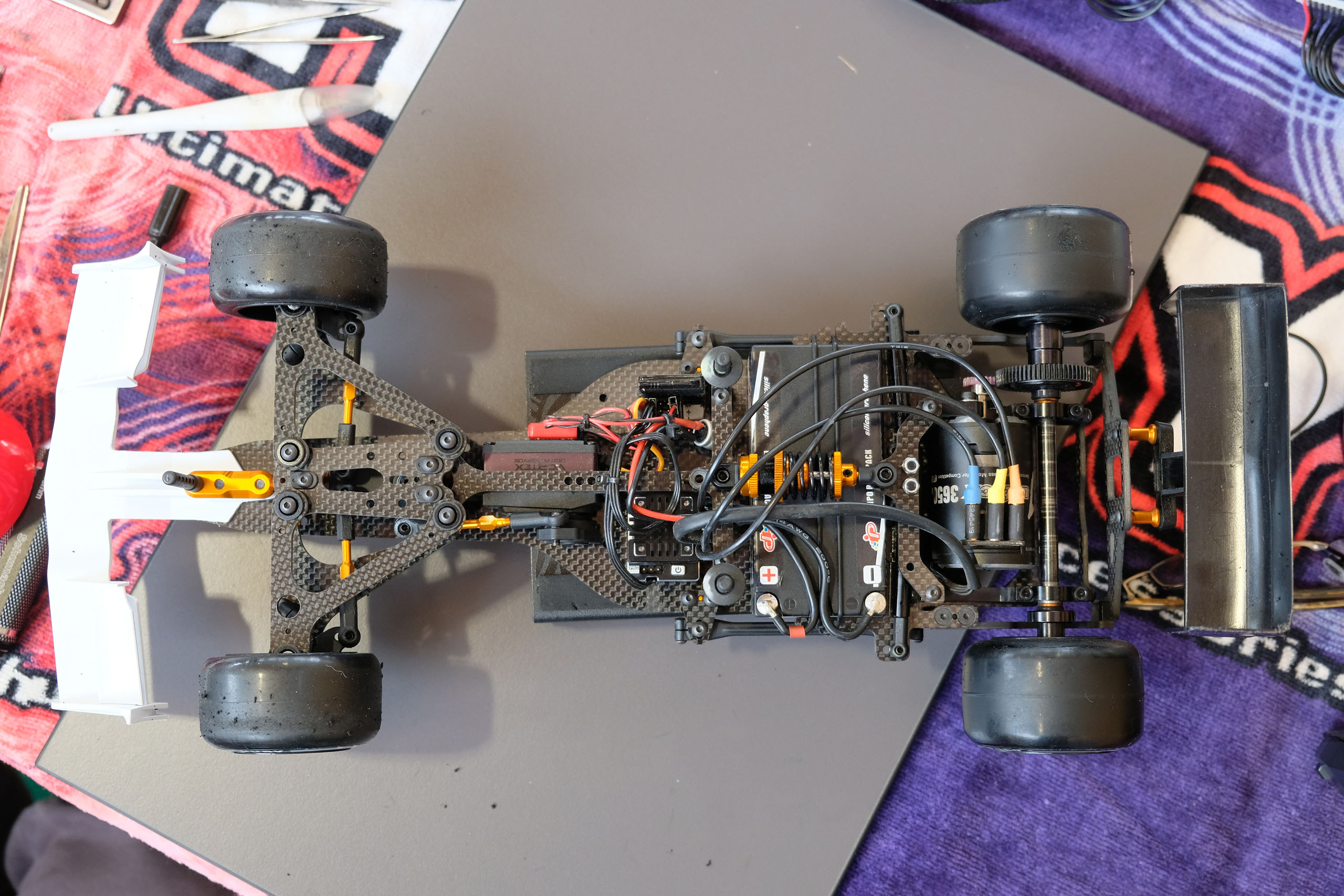
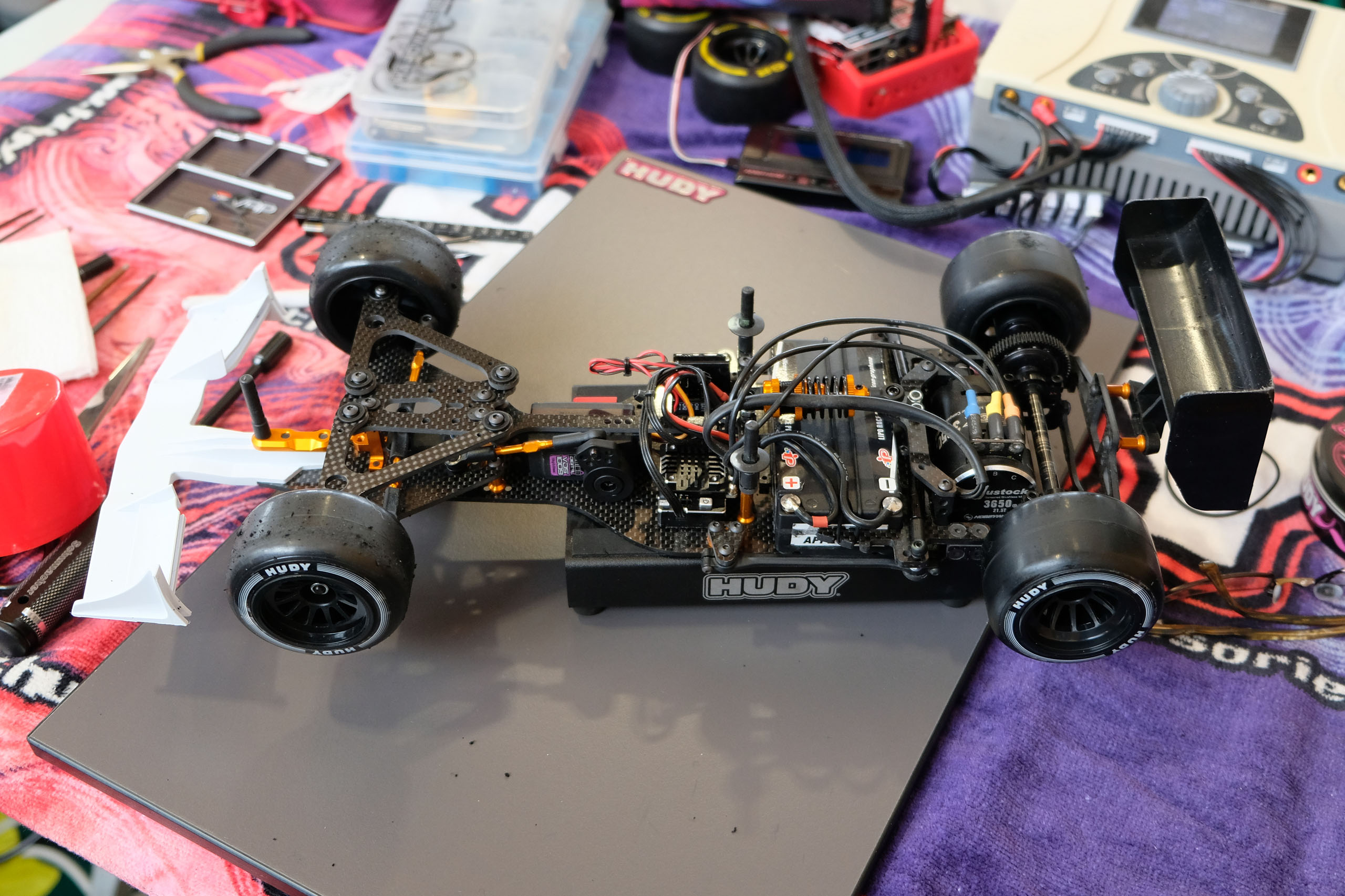
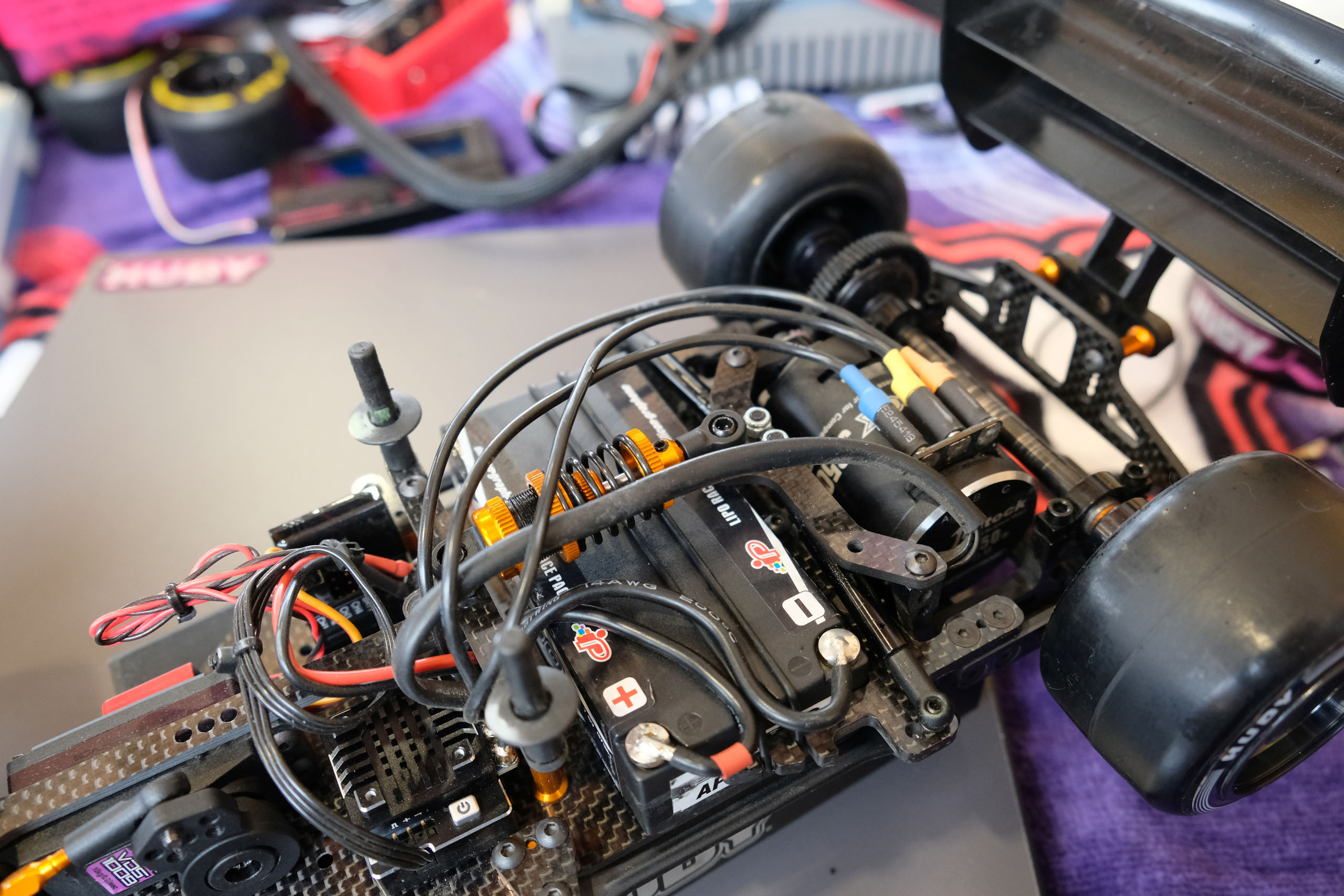
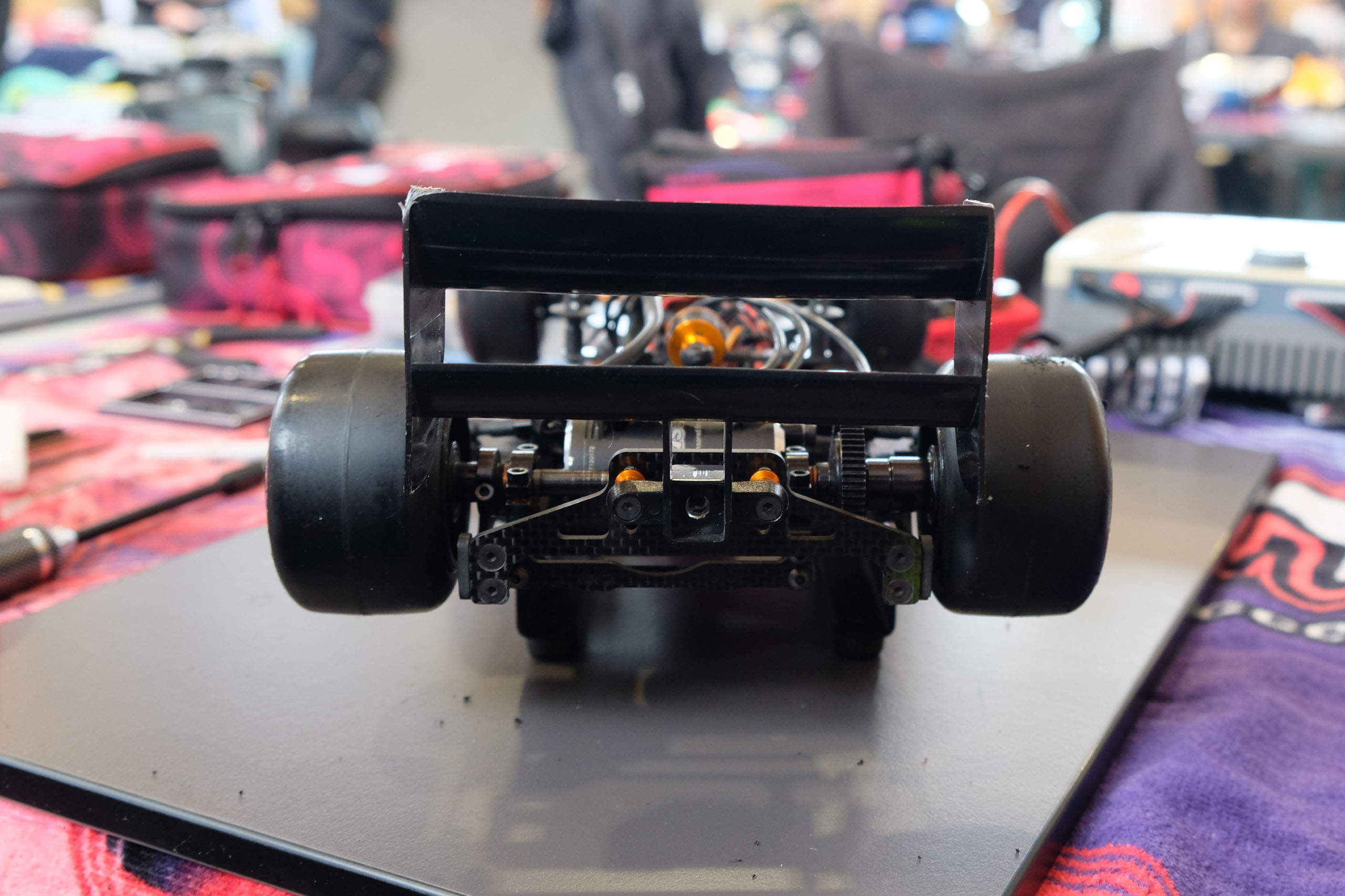
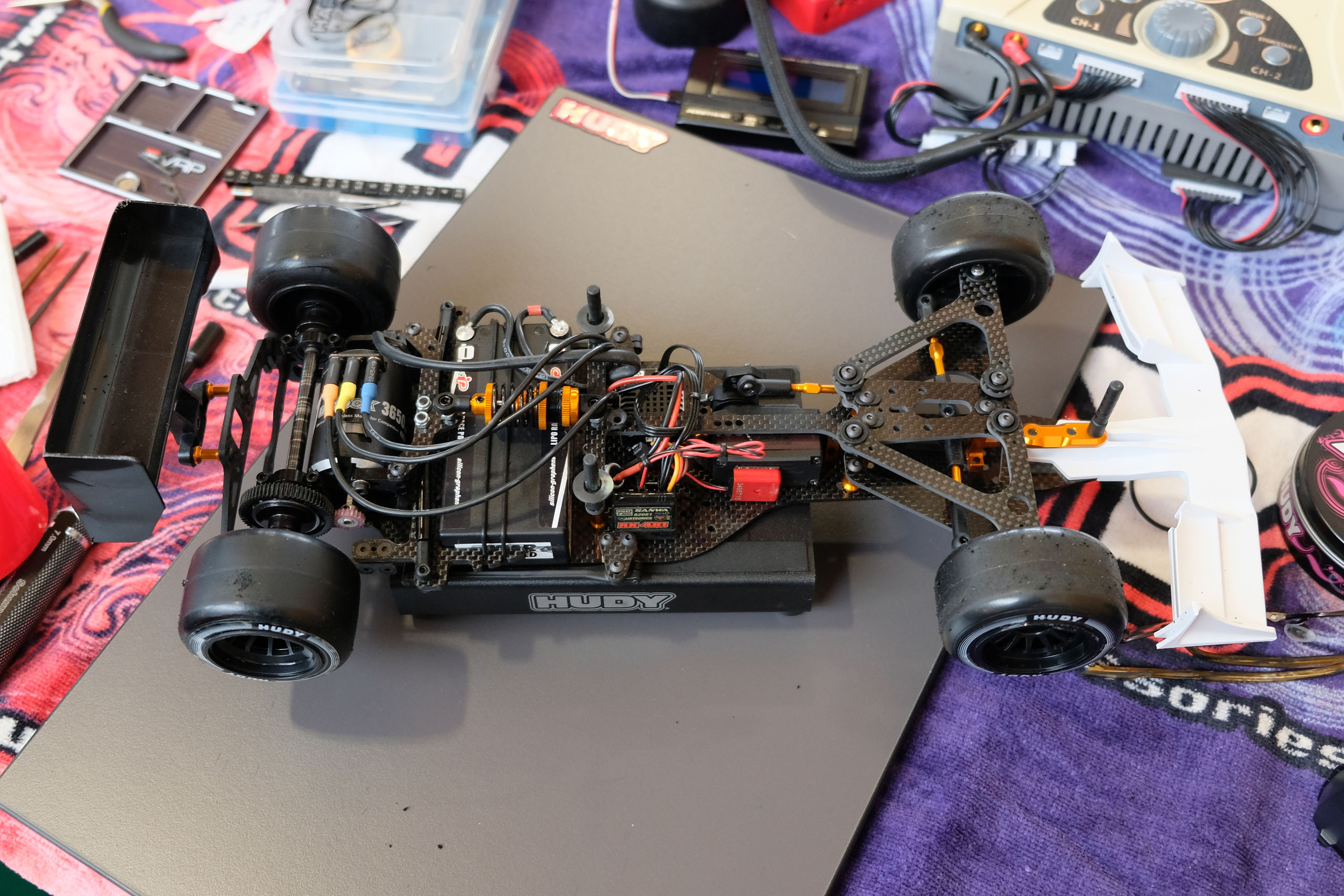
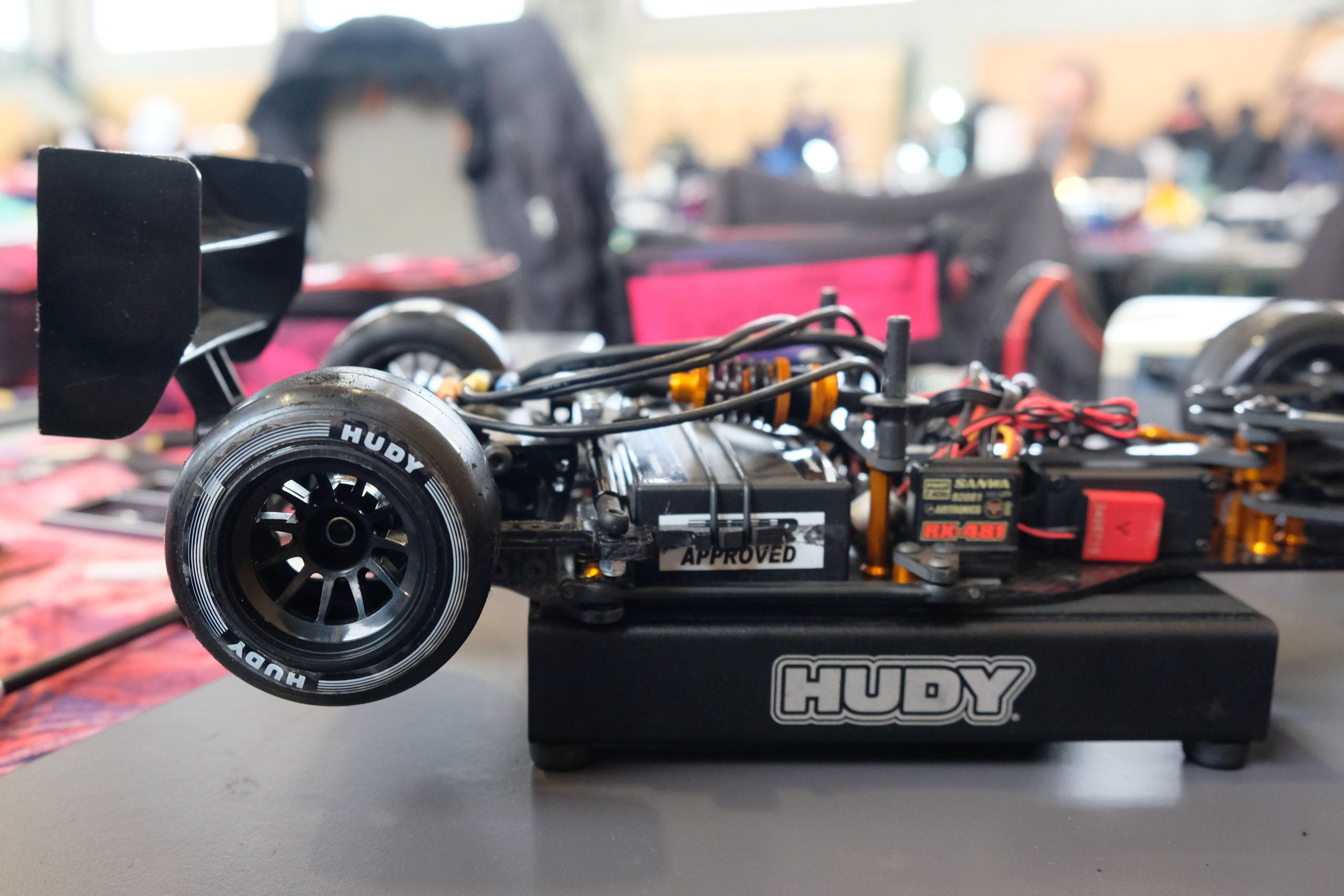
Technique Formule 1.Malheureusement, cette catégorie ne comptait que six pilotes inscrits. Et 100% des Formule 1 étaient des Team XRay de différentes générations. Peu de choses nouvelles donc à se mettre sous la dent... La Team Xray X1 2020 de Goran Eres.En photos ci-dessous, la Team Xray X1 2020 de Goran Eres, qui a fini cinquième de la finale A |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Technique motorisation.Par rapport à la manche précédente, rien de bien nouveau à signaler. La technicité du tracé ayant monté d'un cran, beaucoup de pilotes ont calmé leur motorisation en catégorie Touring Cars. Certains sont même repassé en 13.5T avec le mode "Blinky" pour générer moins de fautes et mieux soigner leurs trajectoires. Dans toutes les catégories, on notera la présence d'une écrasante majorité de moteurs et de contrôleurs Hobbywing, qui domine le marché en Suisse. |
 |
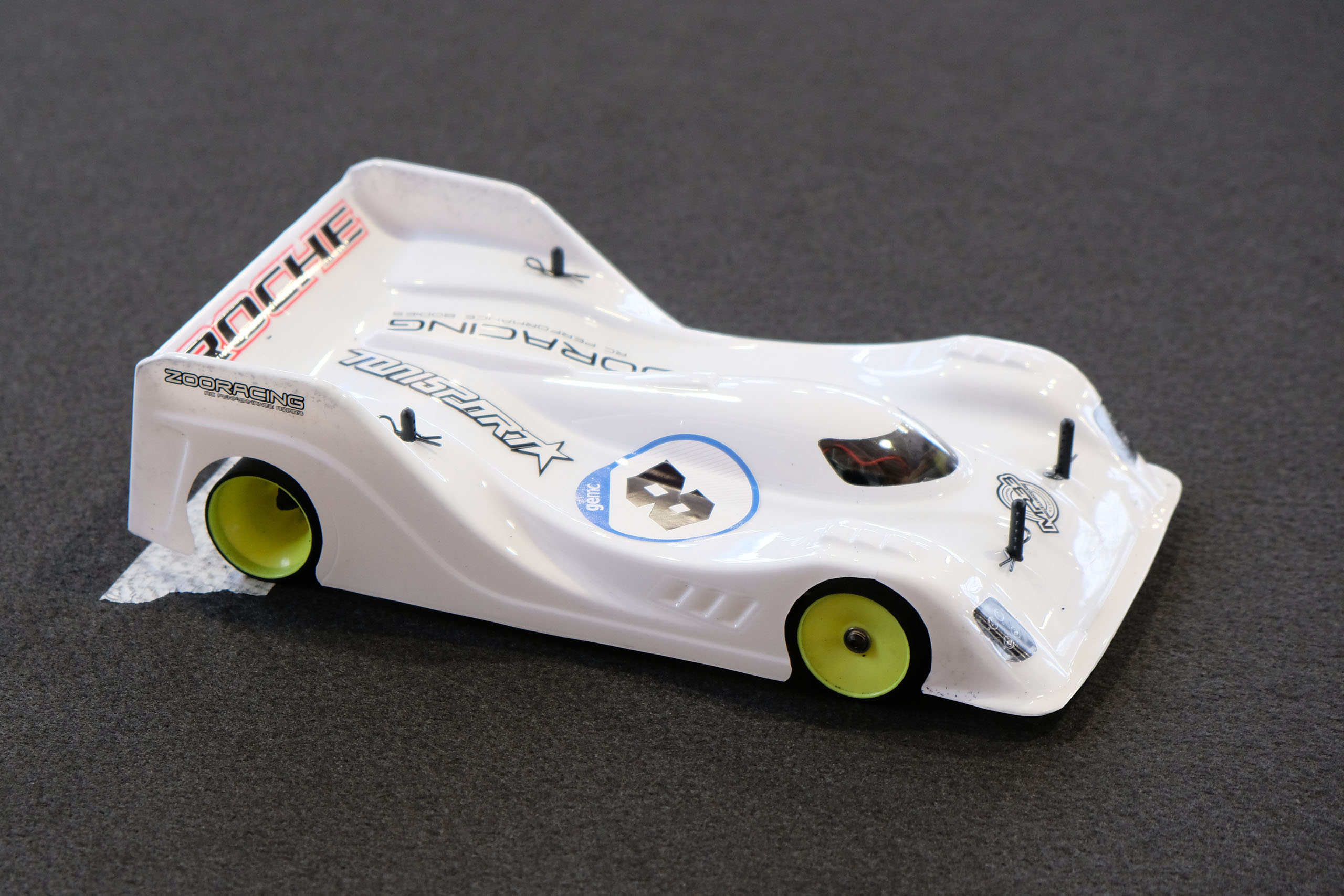
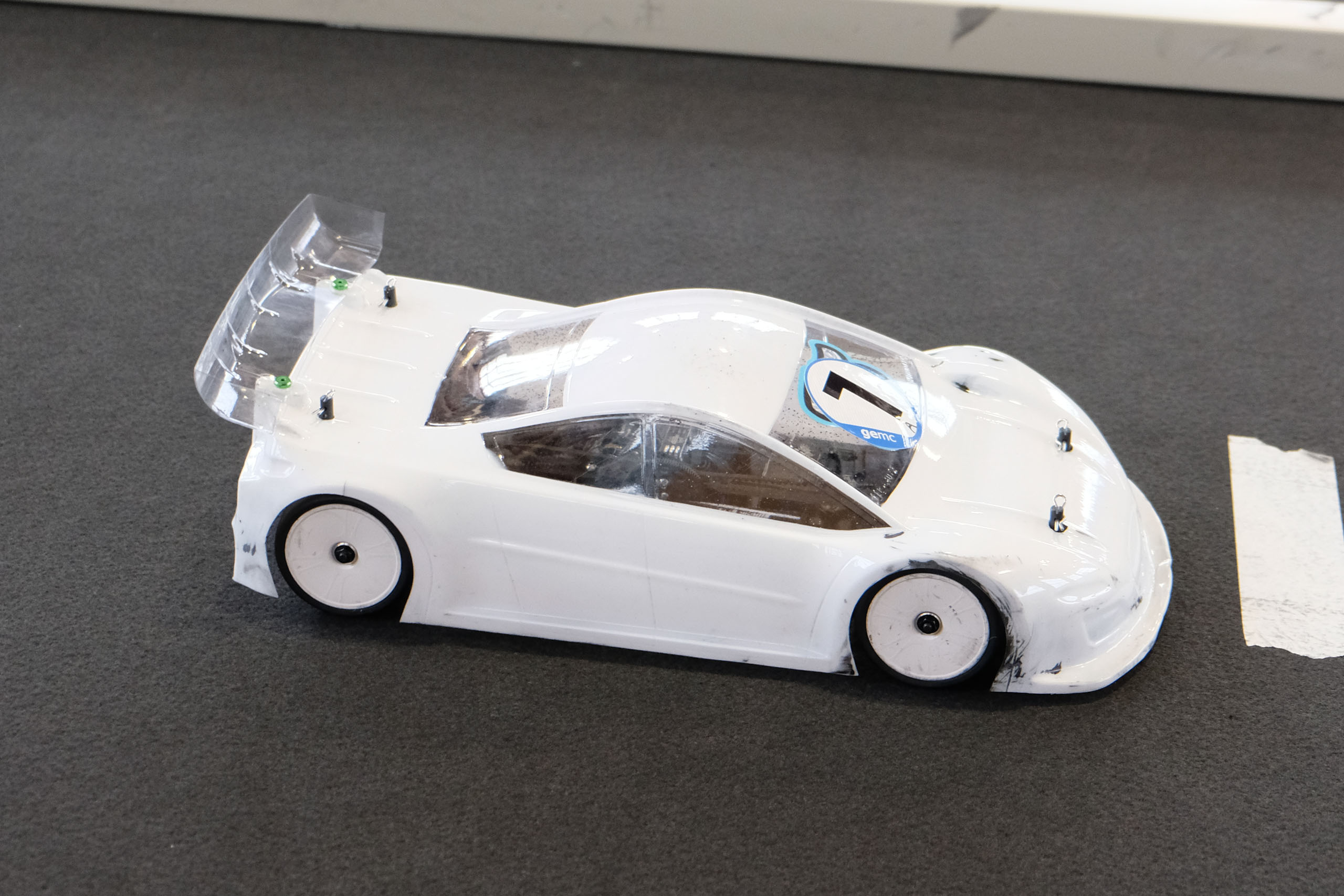
Technique pneus.Par rapport à la manche précédente, rien de bien nouveau à signaler également, car tout a été a peu près dit dans le précédent reportage. Technique carrosserie.Dans la catégorie Piste 1/12°, la grosse nouveauté était la Zoo Racing Drakster ZR-0013, sortie quelques jours avant la course, ce qui explique de la part des utilisateurs de celle-ci, une peinture souvent simple et rapide. Effectivement, comme écrit dans le précédent reportage, la Drakster présente des flancs sculptés comme la BittyDesign Robox, mais l'orientation des creusures formées est inversée, descendantes de l'avant vers l'arrière sur la Robox, et ascendante de l'avant vers l'arrière sur la Drakster. Donc malgré un petit air de famille, ces deux carrosseries devraient avoir un comportement assez différent sur la piste. En carrosserie Touring Cars, il m'a semblé que l'on voit de plus en plus de XTreme Brutale, même si certains pilotes sont revenus en arrière en cours de course, car ils la trouvaient... trop brutale dans ses réactions! BittyDesign semble également gentiment gagner du terrain avec sa Hyper HR, sans toutefois atteindre la présence de XTreme et Zoo Racing. |
 |
Résultats de cette manche.Les résultats complets se trouvent à l'adresse suivante: https://www.myrcm.ch/myrcm/main?pLa=fr&dFi=indoorseries&dId[E]=60585&hId[1]=search |
 |
Résultats en catégorie Touring Car.En qualification, aux avant-postes, cela roule extrêmement vite, et c'est Pierre Delorme (Team XRay X4) qui s'impose devant Valentino Malighetti (Team XRay X4) et Jérémy Limoges (Team Xray X4). Pierre remporte les trois manches de finale, mais derrière c'est très serré et changeant. Mais après calculs des points, Valentino Malighetti prend la seconde place et Bastien De Marco (Awesomatix A800MMX), le vainqueur de la manche précédente, la troisième. Patrick Hofer remporte la finale B devant Cham Dassanayake et Darco Meister. |
 |
 |
|
La finale C est remportée par Kylian Mooser, suivi de Mathias Geneste et Sinan Kaptan-Mark. Cristobal Santos remporte la finale D, suivi de Philéas Bourquard et Patrice Carpano. La finale D a été gagnée par Alex Carusi, suivi de Julien Brulé et Loïc Baboulaz. |
 |
 |
|
Finale |
Position |
Catégorie |
Pilote |
Total |
Points |
Châssis |
|
A |
1 |
TC 13.5 Open |
Pierre Delorme |
2 |
2:1, 1:1 [3:1] |
Team XRay X4 |
|
A |
2 |
TC 13.5 Open |
Valentino Malighetti |
4 |
3:2, 1:2 [2:6] |
Team XRay X4 |
|
A |
3 |
TC 13.5 Open |
Bastien De Marco |
6 |
2:2, 1:4 [3:7] |
Awesomatix A800MMX |
|
A |
4 |
TC 13.5 Open |
Jérémy Limoges |
6 |
1:3, 2:3 [3:5] |
Team XRay X4 |
|
A |
5 |
TC 13.5 Open |
Benjamin Jebira |
8 |
3:3, 2:5 [1:8] |
Team XRay T4'2021 |
|
A |
6 |
TC 13.5 Open |
Sébastien Leuenberger |
8 |
3:4, 2:4 [1:5] |
Mugen Seiki MTC2 |
|
A |
7 |
TC 13.5 Open |
Benjamin Elbisser |
13 |
3:6, 1:7 [2:8] |
Team XRay X4 |
|
A |
8 |
TC 13.5 Open |
Boris Siladi |
13 |
1:6, 2:7 [3:8] |
/ |
|
B |
9 |
TC 13.5 Open |
Hofer Patrick |
3 |
3:1, 1:2 [2:5] |
Mugen Seiki MTC2 |
|
B |
10 |
TC 13.5 Open |
Cham Dassanayake |
3 |
1:1, 3:2 [2:3] |
Team XRay X4 |
|
B |
11 |
TC 13.5 Open |
Darco Meister |
4 |
2:1, 1:3 [3:4] |
/ |
|
B |
12 |
TC 13.5 Open |
Julien Jost |
5 |
2:2, 3:3 [1:7] |
Schumacher Mi7 |
|
B |
13 |
TC 13.5 Open |
Florent Denervaud |
8 |
1:4, 2:4 [3:5] |
Team XRay T4'2018 |
|
B |
14 |
TC 13.5 Open |
Antoine Brulé |
12 |
1:6, 3:6 [2:7] |
/ |
|
B |
15 |
TC 13.5 Open |
Patrick Moser |
13 |
1:5, 3:8 [2:8] |
Awesomatix A800MMX |
|
B |
16 |
TC 13.5 Open |
Nuno Huber |
13 |
2:6, 3:7 [1:8] |
Team XRay X4 |
|
C |
17 |
TC 13.5 Open |
Kylian Mooser |
3 |
2:1, 1:2 [3:4] |
ARCR12.1 |
|
C |
18 |
TC 13.5 Open |
Mathias Geneste |
5 |
1:1, 2:4 [3:9] |
Team XRay X4 |
|
C |
19 |
TC 13.5 Open |
Sinan Kaptan-Mark |
6 |
2:3, 1:3 [3:7] |
/ |
|
C |
20 |
TC 13.5 Open |
Georges Camicas-Aycardi |
7 |
3:2, 2:5 [1:7] |
Awesomatix A800MMX |
|
C |
21 |
TC 13.5 Open |
Dino Cilidonio |
7 |
2:2, 1:5 [3:6] |
/ |
|
C |
22 |
TC 13.5 Open |
Daniel Burgener |
9 |
3:1, 1:8 [2:8] |
Team XRay X4 |
|
C |
23 |
TC 13.5 Open |
Steve Matthey |
9 |
3:3, 2:6 [1:6] |
Team XRay X4 |
|
C |
24 |
TC 13.5 Open |
Gabriel Pinto |
9 |
1:4, 3:5 [2:7] |
/ |
|
D |
25 |
TC 13.5 Open |
Cristobal Santos |
2 |
1:1, 3:1 [2:2] |
Mugen MTC 2 |
|
D |
26 |
TC 13.5 Open |
Philéas Bourquard |
3 |
2:1, 3:2 [1:3] |
Team XRay X4 |
|
D |
27 |
TC 13.5 Open |
Patrice Carpano |
5 |
1:2, 2:3 [3:3] |
Schumacher Mi7 |
|
D |
28 |
TC 13.5 Open |
Jérôme Colas |
8 |
2:4, 3:4 [1:5] |
Team XRay T4'2019 |
|
D |
29 |
TC 13.5 Open |
Dani Caiazza |
10 |
2:5, 3:5 [1:6] |
ARC R11 |
|
D |
30 |
TC 13.5 Open |
Rodrigo Amendoeira |
12 |
1:4, 2:8 [3:9] |
Team XRay T4'2021 |
|
D |
31 |
TC 13.5 Open |
Sergio Dos Santos |
12 |
3:6, 2:6 [1:7] |
Serpent X20'20 |
|
D |
32 |
TC 13.5 Open |
Pascal Carlucci |
14 |
2:7, 3:7 [1:8] |
/ |
|
E |
33 |
TC 13.5 Open |
Alex Carusi |
2 |
3:1, 1:1 [2:1] |
HPI Pro5 |
|
E |
34 |
TC 13.5 Open |
Julien Brulé |
4 |
1:2, 3:2 [2:4] |
Team Yokomo BD7 2013 |
|
E |
35 |
TC 13.5 Open |
Loïc Baboulaz |
7 |
1:3, 2:4 [3:4] |
Vaterra |
Résultats en catégorie Pan Car 1/12°.En qualification, Arnaud Buffat décroche la pôle-position devant Cédric Ansermoz, le vainqueur de la manche précédente, et Cyrille Gruaz. Arnaud remporte la première manche de finale, et Cédric la seconde. La première place sur le podium se décidera donc dans la dernière manche. Et c'est Arnaud gagne celle-ci, un cheveu devant Cédric qui prend donc la deuxième place. Cyrille, régulier, décroche la troisième place sur le podium. Un podium 100% Awesomatix A12 donc en catégorie Pan Car 1/12°: Laurent Maggi remporte la finale B devant Pierre Lahet et Didier Genoud. |
 |
 |
|
Finale |
Position |
Catégorie |
Pilote |
Total |
Points |
Châssis |
|
A |
1 |
Piste 1/12° 13.5 Blinky |
Arnaud Buffat |
2 |
1:1, 3:1 [2:2] |
Awesomatix A12 |
|
A |
2 |
Piste 1/12° 13.5 Blinky |
Cédric Ansermoz |
3 |
2:1, 1:2 [3:2] |
Awesomatix A12 |
|
A |
3 |
Piste 1/12° 13.5 Blinky |
Cyrille Gruaz |
6 |
3:3, 2:3 [1:3] |
Awesomatix A12 |
|
A |
4 |
Piste 1/12° 13.5 Blinky |
Vincent Goublaire |
8 |
1:4, 3:4 [2:4] |
Team XRay X12'19 |
|
A |
5 |
Piste 1/12° 13.5 Blinky |
Albina Nicolas |
10 |
1:5, 2:5 [3:7] |
Black'Art / Project-GodSpeed / Roche |
|
A |
6 |
Piste 1/12° 13.5 Blinky |
Michael Gilliand |
11 |
3:5, 1:6 [2:7] |
Roche P12 Evo2 |
|
A |
7 |
Piste 1/12° 13.5 Blinky |
Jean-Claude Bignens |
12 |
2:6, 3:6 [1:7] |
Awesomatix A12 |
|
A |
8 |
Piste 1/12° 13.5 Blinky |
Sergio Pestana Ramos |
16 |
2:8, 1:8 [3:9] |
Schumacher Eclipse 3 |
|
B |
9 |
Piste 1/12° 13.5 Blinky |
Laurent Maggi |
2 |
2:1, 3:1 [1:2] |
Team XRay X12'21 |
|
B |
10 |
Piste 1/12° 13.5 Blinky |
Pierre Lahet |
3 |
1:1, 2:2 [3:2] |
/ |
|
B |
11 |
Piste 1/12° 13.5 Blinky |
Didier Genoud |
6 |
1:3, 2:3 [3:3] |
Team XRay X12'21 |
|
B |
12 |
Piste 1/12° 13.5 Blinky |
Patrick Courtet |
8 |
2:4, 1:4 [3:4] |
Awesomatix A12 |
|
B |
13 |
Piste 1/12° 13.5 Blinky |
Francisco Chao |
10 |
1:5, 2:5 [3:5] |
Team XRay X12'19 |
Résultats en catégorie Formule 1.En qualification, Chrigu Baeriswyl mène la danse et s'impose dans les quatre manches. Derrière lui, il y a un peu plus de suspens, mais au final, c'est Kalen Dassanayake qui décroche la deuxième place devant Sylvio Kiesewetter, troisième. En finale, Chrigu remporte les trois manches et monte donc logiquement sur la première marche du podium, mais ses victoires ont été moins faciles qu'en qualification, car ses concurrents se sont rapprochés de ses temps et se montrent plus véloces. Mais cela ne suffira pas pour déstabiliser Chrigu. Antoine Dubois, partant quatrième sur la ligne de départ, remonte à la deuxième place sur le podium, grâce à deux deuxièmes places. Sylvio Kiesewetter, grâce à deux troisièmes places, décroche la troisième place aux points. |
 |
|
Finale |
Position |
Catégorie |
Pilote |
Total |
Points |
Châssis |
|
A |
1 |
Formule 1 |
Chrigu Baeriswyl |
2 |
2:1, 1:1 [3:1] |
Team XRay X1'21 |
|
A |
2 |
Formule 1 |
Antoine Dubois |
4 |
2:2, 1:2 [3:5] |
Team XRay X1'21 |
|
A |
3 |
Formule 1 |
Sylvio Kiesewetter |
6 |
2:3, 3:3 [1:4] |
Team XRay X1'20 |
|
A |
4 |
Formule 1 |
Kalen Dassanayake |
7 |
3:2, 2:5 [1:6] |
Team XRay X1 |
|
A |
5 |
Formule 1 |
Goran Eres |
7 |
1:3, 2:4 [3:4] |
Team XRay X1'21 |
|
A |
6 |
Formule 1 |
Olivier Dubois |
11 |
1:5, 2:6 [3:6] |
Team XRay X1'20 |
Ambiance en catégorie Touring Car 1/10° électrique!
|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Ambiance en catégorie Pan-Car 1/12° électrique!
|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Ambiance en catégorie Formule 1 1/10° électrique!
|
 |
 |
 |
 |
 |
 |
En savoir plus:
Texte: Georges. |